Scaricare la presentazione
1
TRASFORMAZIONI GEOMETRICHE Prof. Amelia Vavalli

2
Simmetria Centrale e Identità
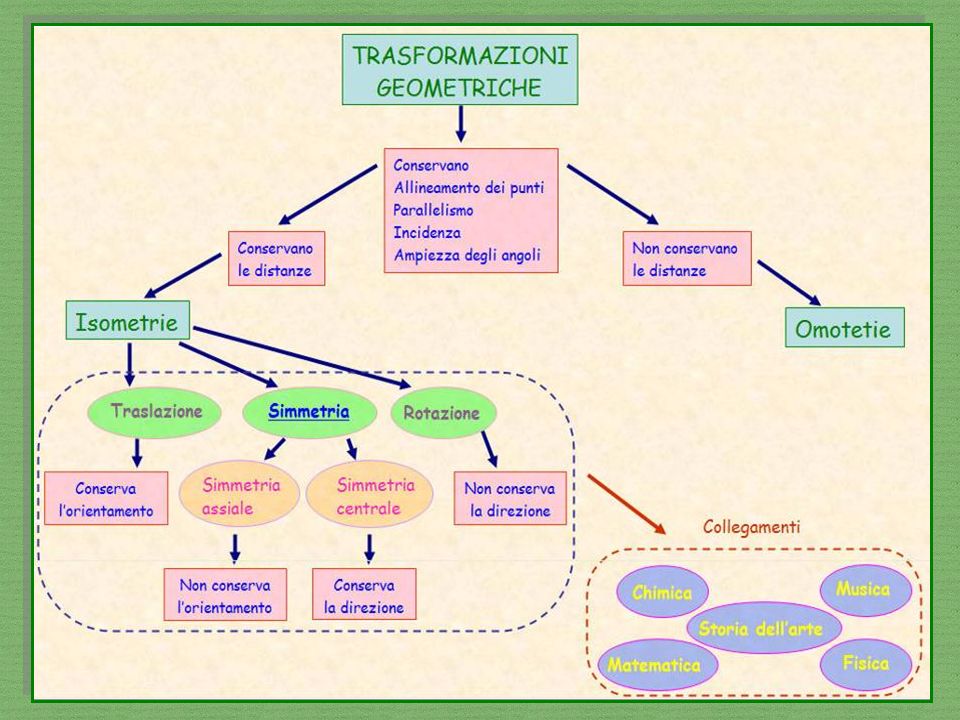
Trasformazioni geometriche Affinità Similitudini Isometrie Onotetie Simmetria Centrale e Identità

3
Isometrie piane Tra le principali trasformazioni geometriche del piano reale si annoverano le isometrie, cioè le particolari trasformazioni geometriche che conservano la distanza tra punti. Le isometrie del piano si possono classificare in: traslazioni, rotazioni, simmetrie centrali, simmetrie assiali. Trasformazioni piane non isometriche Tra le molte trasformazioni geometriche del piano che non mantengono necessariamente le distanze, si ricordano, in particolare, l’omotetia e la similitudine nel piano, trasformazioni del piano che conservano i rapporti tra le distanze, e l’affinità, trasformazione geometrica che conserva il parallelismo di rette e congruenza tra segmenti. Dalle definizioni date segue che le isometrie sono particolari similitudini e che queste sono particolari affinità.

5
Isometrie le simmetrie centrali e assiali, le traslazioni,
Si dice ISOMETRIA una trasformazione geometrica che conserva le distanze ovvero, dati due punti A, B l'isometria fa corrispondere ad essi due punti A' e B' tali che: AB = A'B' Pertanto le figure trasformate risultano congruenti a quelle date e sono: le simmetrie centrali e assiali, le traslazioni, le rotazioni. è una trasformazione geometrica che conserva inalterate tutte le misure, sia lineari sia angolari.

6
ISOMETRIE SIMMETRIA CENTRALE Una simmetria centrale è una trasformazione che scambia tra di loro gli estremi di ogni segmento il quale abbia, come punto medio, un punto fissato detto centro di simmetria.

7
Due punti A e B si dicono simmetrici rispetto ad un punto O ( centro di simmetria ) quando questo e' punto medio del segmento che li unisce. B O A

8
INVARIANTI DELLA SIMMETRIA CENTRALE
L’allineamento dei punti L’incidenza e il parallelismo tra rette La lunghezza dei segmenti e l’ampiezza degli angoli Direzioni (una retta viene trasformata in una retta parallela) Orientamento delle figure ALTRE PROPRIETA’ DELLA SIMMETRIA CENTRALE L’unico punto unito è O centro di simmetria Ogni retta passante per O è unita (ma non luogo di punti uniti) Ogni simmetria centrale è involutoria A ogni semiretta di origine O (centro di simmetria) corrisponde la sua opposta
 Orientamento delle figure. ALTRE PROPRIETA’ DELLA SIMMETRIA. CENTRALE. L’unico punto unito è O centro di simmetria. Ogni retta passante per O è unita (ma non luogo di punti uniti) Ogni simmetria centrale è involutoria. A ogni semiretta di origine O (centro di simmetria) corrisponde la sua opposta.")
9
Ecco alcuni esempi di figure simmetriche rispetto ad un loro punto:
Una figura e' simmetrica rispetto ad un centro se ogni suo punto ammette un simmetrico nella figura. Ecco alcuni esempi di figure simmetriche rispetto ad un loro punto: A B A O B1 A1 A1 Il centro di simmetria è il punto d'intersezione delle loro diagonali.

11
Esempi di simmetria centrale in arte
ESCHER: DA CIRCLE

12
Notre Dame- Paris

13
Lo splendido rosone del Duomo di Orvieto, realizzato dal fiorentino Andrea di Cione detto l'Orcagna.

14
ISOMETRIE SIMMETRIE ASSIALI Una riflessione o simmetria assiale è una trasformazione che "specchia" tutti i punti rispetto a (rispettivamente) un punto, una retta, o un piano (detti rispettivamente centro, asse o piano di riflessione
 un punto, una retta, o un piano (detti rispettivamente centro, asse o piano di riflessione.")
15
le simmetrie assiali (o ribaltamento)
Fissata una retta r nel piano, la simmetria assiale è una isometria del piano in se stesso che associa ad ogni punto A il punto A’, simmetrico di A rispetto a r. La retta r si chiama asse di simmetria. r r

16
INVARIANTI ALTRE PROPRIETA’ F F‘ L’allineamento dei punti.
L ’ incidenza e il parallelismo tra rette La lunghezza dei segmenti L’ampiezza degli angoli F F‘ r ALTRE PROPRIETA’ L’asse è una retta unita formata da punti uniti Tutte e sole le rette perpendicolari all’asse sono unite (ma non luoghi di punti uniti) Ogni simmetria assiale è involutoria
 Ogni simmetria assiale è involutoria.")
17
ESEMPIO 180° D A A1 D1 B C1 B1 C Asse di simmetria

18
Esempi di figure geometriche che
ammettono assi di simmetria:

19
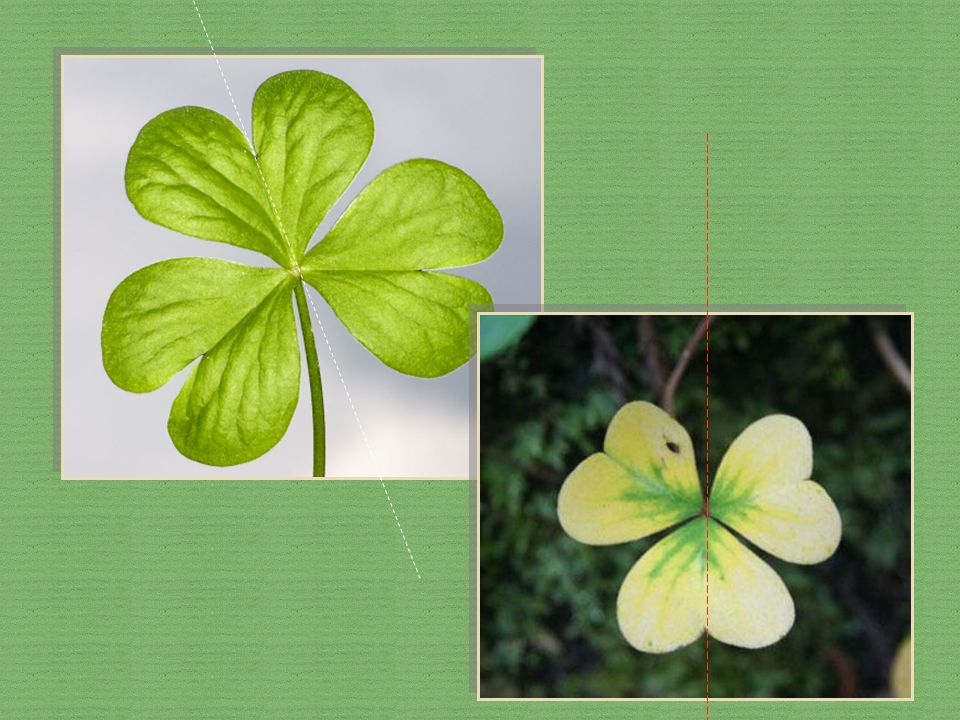
Esempi di simmetria assiale nella natura

22
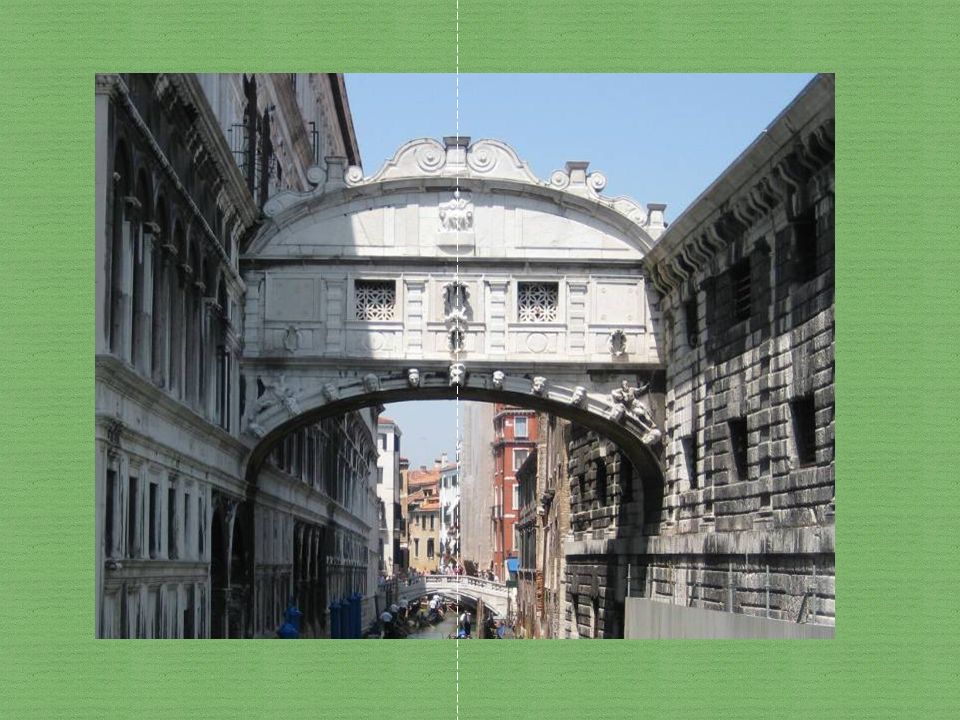
Esempi di simmetria assiale nell’arte

24
ISOMETRIE TRASLAZIONI Una traslazione è una trasformazione affine dello spazio euclideo, che sposta tutti i punti di una distanza fissa nella stessa direzione. La si può anche interpretare come addizione di un vettore costante ad ogni punto, o come spostamento dell'origine del sistema di coordinate.

25
le traslazioni (Traslare significa ‘spostare, portare oltre, dal latino “trans-ferre”) Si definisce traslazione di vettore v , una isometria del piano in se stesso che associa ad ogni punto P del piano il punto P’ tale che abbia la stessa direzione, lo stesso verso lo stesso modulo di . P1 P v

26
L’allineamento dei punti L’incidenza e il parallelismo tra rette
INVARIANTI nella TRASLAZIONE L’allineamento dei punti L’incidenza e il parallelismo tra rette La lunghezza dei segmenti e l’ampiezza degli angoli Direzioni (una retta viene trasformata in una retta parallela) Orientamento delle figure D1 C1 A1 B1 C D V ALTRE PROPRIETA’ della TRASLAZIONE In una traslazione non esistono punti uniti Ogni retta parallela a V è unita A B per verificare che due figure si corrispondono in una traslazione, basta controllare che i segmenti che uniscono due punti corrispondenti sono paralleli e congruenti.
 Orientamento delle figure. D1. C1. A1. B1. C. D. V. ALTRE PROPRIETA’ della. TRASLAZIONE. In una traslazione non esistono punti uniti. Ogni retta parallela a V è unita. A. B. per verificare che due figure si corrispondono in una traslazione, basta controllare che i segmenti che uniscono due punti corrispondenti sono paralleli e congruenti.")
27
Esempi di traslazione in arte
ESCHER

28
ESCHER

30
ISOMETRIE ROTAZIONI Una rotazione è una trasformazione del piano o dello spazio euclideo che sposta gli oggetti in modo rigido e che lascia fisso almeno un punto. I punti che restano fissi nella trasformazione formano un sottospazio: quando questo insieme è un punto (l'origine) o una retta, si chiama rispettivamente il centro e l'asse della rotazione.
 o una retta, si chiama rispettivamente il centro e l asse della rotazione.")
31
le rotazioni INVARIANTI ALTRE PROPRIETA’ L’allineamento dei punti
L’incidenza e il parallelismo tra rette La lunghezza dei segmenti e l’ampiezza degli angoli Orientamento delle figure ALTRE PROPRIETA’ L’unico punto unito è il centro O di rotazione. Tutte e sole le rette passanti per O sono unite per verificare che due figure si corrispondono in una rotazione, basta controllare che ogni coppia di punti corrispondenti è equidistante dal centro di rotazione O, che si determina come intersezione degli assi di due segmenti che hanno per estremi due coppie qualsiasi di punti che si corrispondono.

32
P O

33
P1 P O

34
P2 P1 P O

35
Esempi di rotazione in arte
ESCHER

36
ESCHER

37
OMOTETIA Un'omotetia è una trasformazione geometrica che permette di ingrandire o ridurre una figura lasciandone inalterata la forma.

38
A A1 B A2 C B1 C1 B2 C2

39
Un'omotetia di centro O è una trasformazione dello spazio euclideo che "dilata" le distanze da O di tutti i punti secondo un fattore c, lasciando invariate le rette passanti per A che per questo si dicono unite. In altre parole, un qualsiasi punto P dello spazio viene spostato sulla semiretta uscente da O e passante per P, in modo che la sua distanza da A cambi secondo un fattore costante c positivo. L'unico punto che corrisponde a se stesso e che per questo si dice unito è il punto A. Il punto A è il centro, mentre c è il rapporto dell'omotetia. Questa trasformazione geometrica è anche chiamata con termini più familiari dilatazione, se c>1, contrazione se c<1. Se "c=1" si ottiene ovviamente l'identità ovvero la trasformazione nella quale ogni punto corrisponde a se stesso. L'omotetia è una particolare similitudine.

41
kandinskij Composizione di OMOTETIA e TRANSLAZIONE

42
La similitudine è una particolare trasformazione geometrica nella quale ad una figura ne corrisponde un'altra avente la stessa forma. In una similitudine i segmenti che si corrispondono sono in un rapporto costante che prende il nome di "rapporto di similitudine"; gli angoli corrispondenti sono invece congruenti. Una qualunque similitudine si può ottenere mediante la composizione di una isometria con un'omotetia.















 Definizione e proprietà>")


 Rotazione 3) Rototraslazione 1) Traslazione>")

>")


