Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Intelligenza Artificiale 1 Gestione della conoscenza lezione 4 Prof. M.T. PAZIENZA a.a. 2000-2001

2
Tipi di problemi Problemi a stato singolo (deterministico, accessibile) Problemi a stati multipli (deterministico, inaccessibile) Problemi di contingenza (nondeterministico, inaccessibile) Problemi di esplorazione (spazio degli stati sconosciuto)
 Problemi a stati multipli (deterministico, inaccessibile) Problemi di contingenza (nondeterministico, inaccessibile) Problemi di esplorazione (spazio degli stati sconosciuto)")
3
Classi di problemi Problemi giocattolo (Rompicapo dell’8 – Mondo dell’aspirapolvere) Problemi del mondo reale (Ricerca di itinerario)
 Problemi del mondo reale (Ricerca di itinerario)")
4
Rompicapo dell’8 tessera vuota Operatore: lo tessera vuota cambia posto con la tessera alla sua sinistra

5
Formulazione di problemi a stato singolo Un tale problema è definito da 4 caratteristiche: 1.Stato iniziale 2.Operatore / funzione successore S(x) 3.Test obiettivo 4.Funzione costo cammino Una soluzione è una sequenza di operatori che conducono dallo stato iniziale ad uno stato obiettivo
 3.Test obiettivo 4.Funzione costo cammino Una soluzione è una sequenza di operatori che conducono dallo stato iniziale ad uno stato obiettivo")
6
Rompicapo dell’8 Formulazione del problema tessera vuota Stati: posizione di ciascuna delle 8 tessere + tessera vuota : Operatori: muovere la tessera vuota a sinistra, destra, sopra, sotto (nessun salto ammesso) Test obiettivo: configurazione finale Costo di cammino: ciascun passo costa 1 (costo del cammino = lunghezza del cammino)
 Test obiettivo: configurazione finale Costo di cammino: ciascun passo costa 1 (costo del cammino = lunghezza del cammino)")
7
Classi di problemi Problemi giocattolo (Rompicapo dell’8 – Mondo dell’aspirapolvere) Problemi del mondo reale (Ricerca di itinerario)
 Problemi del mondo reale (Ricerca di itinerario)")
8
Mondo dell’aspirapolvere Spazio degli stati Archi/azioni: L=spostati a sn, R=spostati a dx, S=aspira

9
Formulazione di problemi a stato singolo Un tale problema è definito da 4 caratteristiche: 1.Stato iniziale 2.Operatore / funzione successore S(x) 3.Test obiettivo 4.Funzione costo cammino Una soluzione è una sequenza di operatori che conducono dallo stato iniziale ad uno stato obiettivo
 3.Test obiettivo 4.Funzione costo cammino Una soluzione è una sequenza di operatori che conducono dallo stato iniziale ad uno stato obiettivo")
10
Mondo dell’aspirapolvere semplificato Agente conosce la propria posizione e le posizioni di tutte le parti con sporcizia; aspira bene. Stati: uno degli stati di figura Operatori: spostati a sn, spostati a dx, aspira Test obiettivo: non lasciare sporcizia nei quadrati Costo di cammino: ciascuna azione costa 1 Soluzione: da un qualsiasi stato di partenza seguire le frecce fino ad uno stato obiettivo

11
Formulazione di problemi a stati multipli Un tale problema è definito da 4 caratteristiche: 1.Insieme di stati iniziali 2.Insieme di operatori / funzione successore S(x) (per ciascuna azione viene specificato l’insieme di stati raggiunti da qualsiasi stato considerato. Un cammino collega insiemi di stati) 3.Test obiettivo 4.Funzione costo cammino Una soluzione è un cammino che conduce ad un insieme di stati che sono tutti stati obiettivo. Spazio dell’insieme di stati
 3.Test obiettivo 4.Funzione costo cammino Una soluzione è un cammino che conduce ad un insieme di stati che sono tutti stati obiettivo. Spazio dell’insieme di stati.")
12
Mondo dell’aspirapolvere senza sensori In qualsiasi istante l’agente si trova in un insieme di stati ma non sa in quale stato di quell’insieme sia

13
Mondo dell’aspirapolvere senza sensori L’aspirapolvere non ha alcun sensore e deve raccogliere tutta la sporcizia Insiemi di stati: sottoinsiemi di stati della figura Operatori: spostati a sn, spostati a dx, aspira Test obiettivo: ogni stato dell’insieme degli stati non contiene sporcizia Costo di cammino: ciascuna azione costa 1 Soluzione: dall’insieme iniziale degli stati (tutti) seguire le frecce fino a raggiungere un insieme di stati senza sporcizia
 seguire le frecce fino a raggiungere un insieme di stati senza sporcizia")
14
Classi di problemi Problemi giocattolo (Rompicapo dell’8 – Mondo dell’aspirapolvere) Problemi del mondo reale (Ricerca di itinerario)
 Problemi del mondo reale (Ricerca di itinerario)")
15
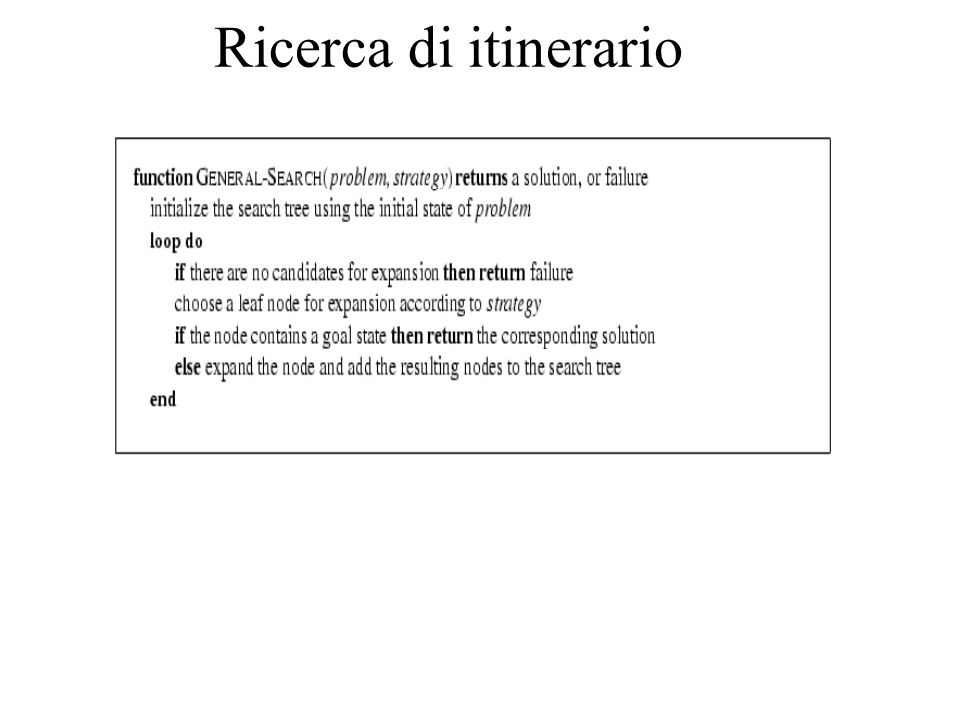
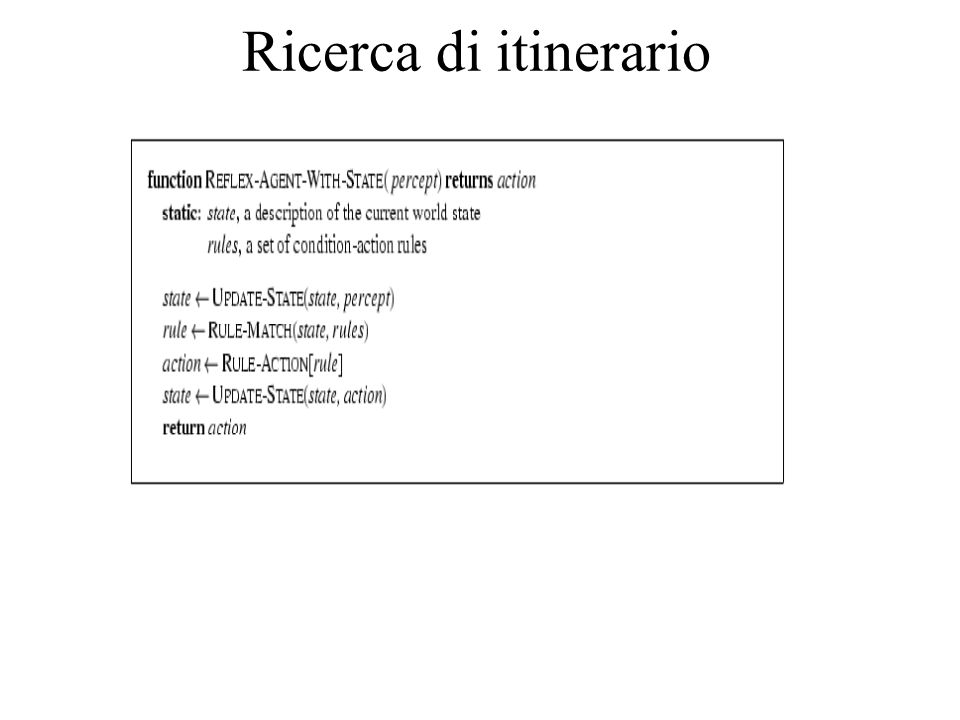
Ricerca di itinerario Trovare un itinerario da Arad a Bucarest

16
Ricerca di itinerario Costo del cammino proporzionale al numero di miglia totali del percorso (aggiunta logoramento ) Costo di ricerca dipende da ambiente: se statico, costo zero (perché la misura delle prestazioni è indipendente dal tempo), se semidinamico (urgenza di giungere a Bucarest) deliberazioni più lunghe costeranno di più. Costo totale = miglia + secondi

17
Ricerca di itinerario

Presentazioni simili








 M.T. PAZIENZA a.a. 2009-2010.>")


 Prof. M.T. PAZIENZA a.a. 2005-2006.>")







