Gli end-effector Prof. Gino Dini – Università di Pisa
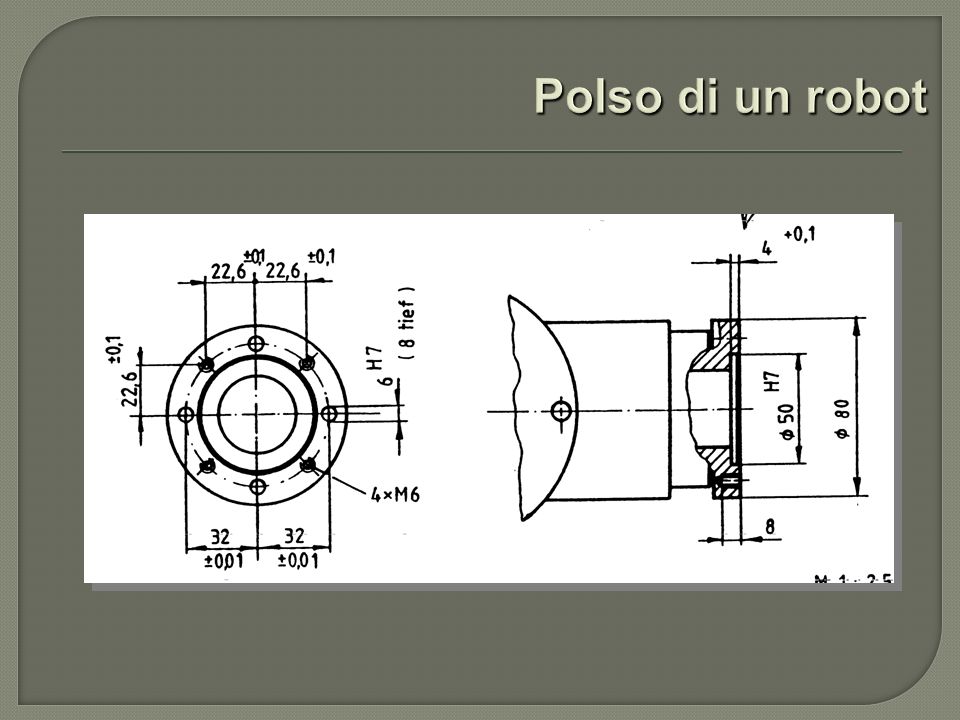
Polso di un robot
Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri … Utensili (tool)
Gripper meccanico Braccio del robot Polso Corpo del gripper Dito Pezzo da afferrare
Vantaggi e svantaggi elevata stabilità elevata precisione necessità di almeno due superfici contrapposte tempi elevati ingombri elevati
Caratteristiche di un gripper meccanico Modalità di apertura/chiusura dita Meccanismo di movimentazione dita Corsa di apertura/chiusura dita Peso e ingombro Forza di apertura e chiusura Tipo di polpastrello Numero dita
Meccanismo articolato
Meccanismo con rotismi
Meccanismo con camme
Meccanismo con vite-madrevite
Caratteristiche di un gripper meccanico Modalità di apertura/chiusura dita Meccanismo di movimentazione dita Corsa di apertura/chiusura dita Peso e ingombro Forza di apertura e chiusura Tipo di polpastrello Numero dita
Gripper parallelo Sommer GP 100
Gripper parallelo Sommer GP 100
Gripper parallelo Sommer GP 100 Corsa totale: 26 mm Tempo di apertura o chiusura: 0,3 sec Forza esercitata durante la chiusura: 210 N Forza per aprire le dita: 370 N Forza esercitata durante l’apertura: 100 N Forza per chiudere le dita: 195 N Peso: 1,4 kg Ingombro: 120 x 86 x 50 mm
Gripper articolato Sommer GK 25 N
Gripper articolato Sommer GK 25 N Corsa totale: 0-180° (registrabile) Tempo di apertura o chiusura: 0,4 sec Forza esercitata durante la chiusura: 2,5 Nm Forza per aprire le dita: 7,0 Nm Peso: 0,41 kg Ingombro: 80 x 50 x 35 mm
Gripper a 3 dita GD 50
Gripper a 3 dita GD 50 Corsa totale: da f 8 mm a f 70 mm Tempo di apertura o chiusura: 0,3 sec Forza esercitata durante la chiusura: 250 N Forza esercitata durante la apertura: 250 N Peso: 1,95 kg Ingombro: 180 x 88 x 88 mm
Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri … Utensili (tool)
Gripper a depressione Polso del robot Corpo del gripper Flusso di aria Ventosa Superficie del pezzo da afferrare
Vantaggi e svantaggi adatto a materiali fragili e delicati rapidità e facilità di presa bassa precisione necessità di superfici lisce, prive di fori o porosità
Gripper a depressione
Circuito di alimentazione
Gripper multiplo a depressione
Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri … Utensili (tool)
Gripper a espansione Polso del robot Corpo del gripper Pezzo da afferrare Elemento espandibile
Vantaggi e svantaggi elevata precisione elevata stabilità necessità di presenza di fori limitata flessibilità
Gripper a colletto Sommer LG 20-50
Gripper a colletto Sommer LG 30-50 Corsa totale: 1 mm Tempo di apertura o chiusura: 0,3 sec Forza esercitata durante la chiusura: - Forza esercitata durante la apertura: 30 N Peso: 0,25 kg Ingombro: 40 x (f 30 - 40 - 50 mm)
Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri … Utensili (tool)
Gripper magnetico Polso del robot Corpo del gripper Pezzo da afferrare Magnete o elettromagnete
Vantaggi e svantaggi della presa con un gripper magnetico rapidità e facilità di presa presa anche su superfici forate bassa precisione afferraggio su mat. ferromagnetici necessità di superfici piane
Tipologie di end effector Organi di presa (gripper) meccanici a depressione a espansione magnetici altri … Utensili (tool)
Gripper per tessuti (ad aghi)
Gripper per montaggio di O-ring
Gripper per oggetti delicati
Gripper “contactless”
Montaggio gripper sul polso
Sistemi impiegati per aumentare la flessibilità dei gripper Sistemi di cambio gripper Torrette portagripper
Sistema di cambio gripper Braccio del robot Interfaccia solidale al robot Magazzino gripper Interfaccia solidale al gripper Gripper
Esempio di specifica di un sistema di cambio gripper Peso interfaccia robot: 0,45 kg Peso interfaccia gripper: 0,25 kg Capacità di carico: 4 kg Porte aria: 6 porte M5 e 1 porta 1/4” Connettore elettrico: 30 pin da 8 A Ingombro totale: 94 x 78 x 65 mm
Applicazione sistema di cambio gripper
Torretta portagripper
Torretta portagripper (on-off)
End effector Organi di presa (gripper) Utensili (tool) meccanici a depressione a espansione magnetici Utensili (tool)
Utensile per saldatura all’arco elettrico
Utensile per saldatura a resistenza
Utensile per sbavatura