Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Prof. Massimo Lazzari IMPIANTI E STRUTTURE Corso di Laurea in PAAS

2
LA MUNGITURA ROBOTIZZATA

3
I generazione 1984 II generazione 1992
III generazione

4
LE MOTIVAZIONI: ripetitività delle operazioni di mungitura;
operazioni da eseguirsi in giorni e orari asociali; ambiente ergonomicamente non favorevole; scarsa reperibilità degli operatori aleatorietà degli addetti e livello professionale sempre più scadente

5
Automazione Integrale
In un sistema robotizzato non è prevista la presenza dell’uomo al quale è demandato anche il controllo degli animali necessità di un sistema in grado di controllare automaticamente, e in continuo, gli animali Biosensing

6
Fiolosofia complessiva AMS
Raccolta Dati (Produzione, Alimentazione, Attività, Conducibilità latte, Temperatura, …) Elaborazione Dati Interventi Mirati: Inseminazioni Alimentazione Cure ... Output Analisi e Pianificazione
 Elaborazione. Dati. Interventi Mirati: Inseminazioni. Alimentazione. Cure. ... Output. Analisi e Pianificazione.")
7
Self milking

8
DIFFUSIONE

9
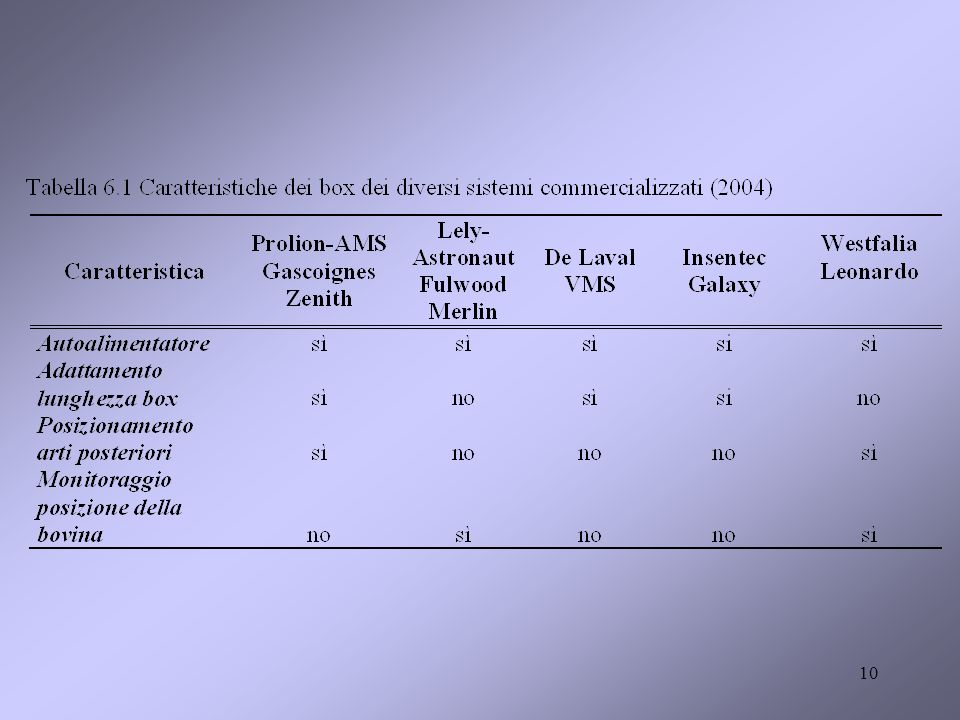
Box Automatizzato SINGOLO: Lely+ Merlin , Alfa Laval, Gasoignes Melotte, Insentec PLURIMO: Leonardo, Gascoignes Melotte , Insentec REQUISITI: ADATTAMENTO DIMENSIONI VACCA VINCOLAMENTO ANIMALI CONFORT Difficoltà tecnologiche: medie, risolte sviluppi tecnologici: semplici miglioramenti

11
BRACCIO ROBOTIZZATO MANIPOLAZIONE CONTEMPORANEA DEI 4 PRENDICAPEZZOLI – (end effector) (Prolion - Lely) Difficoltà tecnologiche: minori sviluppi tecnologici: maggiore velocità di attacco, minori problemi di gestione dei tubi lunghi del latte

12
BRACCIO ROBOTIZZATO PRELIEVO DA UN “MAGAZZINO UTENSILI” ESTERNO E MANIPOLAZIONE SINGOLO PRENDICAPEZZOLO (LEONARDO, Alfa Laval, Insentec) Difficoltà tecnologiche: intrinsecamente elevate, ma risolte. sviluppi tecnologici: di pari passo con l’automazione industriale: probabili incrementi nella velocità di azionamento e nella comunicazione con il sistema di controllo centrale
 Difficoltà tecnologiche: intrinsecamente elevate, ma risolte. sviluppi tecnologici: di pari passo con l’automazione industriale: probabili incrementi nella velocità di azionamento e nella comunicazione con il sistema di controllo centrale.")
13
Attacco in stretta successione Attacco individuale da un da un unico porta prendicapezzoli magazzino utensili esterno

14
Caratteristiche dei bracci robotizzati degli AMS in commercio
) Caratteristiche dei bracci robotizzati degli AMS in commercio Caratteristica Prolion-AMS Gascoignes Zenith Lely-Astronaut Fulwood Merlin De Laval VMS Westfalia Leonardo Insentec Galaxy Coordinate Robot Cilindriche Sferiche Cartesiane Tipologia Robot Ad hoc Standard Sistema di Attacco end effector automatizzato Magazzino Prendicapezzoli N° Postazioni Multipostazione (1-4) Monopostazione
 Caratteristiche dei bracci robotizzati degli AMS in commercio. Caratteristica. Prolion-AMS Gascoignes. Zenith. Lely-Astronaut. Fulwood Merlin. De Laval. VMS. Westfalia. Leonardo. Insentec. Galaxy. Coordinate Robot. Cilindriche. Sferiche. Cartesiane. Tipologia Robot. Ad hoc. Standard. Sistema di Attacco. end effector automatizzato. Magazzino Prendicapezzoli. N° Postazioni. Multipostazione (1-4) Monopostazione.")
15
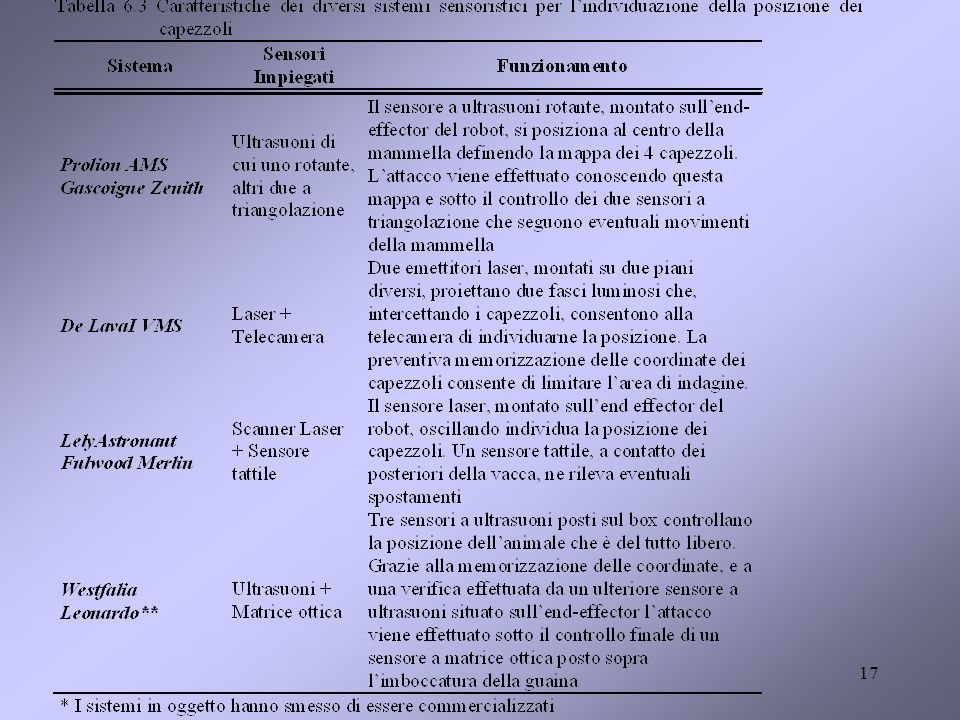
LOCALIZZAZIONE DEI CAPEZZOLI
Avvicinamento Grossolano: MEMORIZAZZIONE COORDINATE SENSORI TATTILI Sistemi per la Localizzazione Fine: DIVERSE MODALITA’ OPERATIVE Localizzazione Fine A MATRICE OTTICA ULTRASUONI LASER Laser + telecamera Difficoltà tecnologiche del sottosistema: elevate, ma oggi superate sviluppi tecnologici: incrementali

16
LOCALIZAZZIONE FINE DEI CAPEZZOLI
ultrasuoni Laser + telecamera Matrice ottica

18
Impiantistica

19
IL LAVAGGIO DEI CAPEZZOLI è operazione fondamentale, unitamente alla disinfezione delle guaine

20
IL LAVAGGIO DEI CAPEZZOLI
Post dipping sempre presente

21
LAVAGGIO IMPIANTO

22
Robot di mungitura e qualità del latte
La maggior parte dei robot installati NON HA PORTATO ad un miglioramento significativo della qualità del latte E’ necessaria una maggiore conoscenza sulla gestione dei nuovi sistemi da parte di tecnici e allevatori

23
I ROBOT DI MUNGITURA IN COMMERCIO LE CARATTERISTICHE FONDAMENTALI

24
I ROBOT DI MUNGITURA IN COMMERCIO LE CARATTERISTICHE FONDAMENTALI

25
I ROBOT DI MUNGITURA IN COMMERCIO LE CARATTERISTICHE FONDAMENTALI

26
LE PRESTAZIONI Tempo di funzionamento: 22-23 h/gg
Durata della singola mungitura: circa 7-8 min (compresi i tempi morti in/out) N.° mungiture giornaliere: ( nei multipostazione) N° medio di mungiture / capo gg: 2,5 – 3 Latte munto: 1,8-2,5 t/giorno (1,5-2,2 nei multipostazione) N° di lavaggi / giorno: 3 – 4
 N.° mungiture giornaliere: ( nei multipostazione) N° medio di mungiture / capo gg: 2,5 – 3. Latte munto: 1,8-2,5 t/giorno (1,5-2,2 nei multipostazione) N° di lavaggi / giorno: 3 – 4.")
27
LE PRESTAZIONI Prezzo: 125-150 kEuro (monopostazione)
Numero di capi dominabili da un sistema monopostazione: 55-65 Numero di capi dominabili da un sistema multipostazione a due postazioni: Tandem: Speculare: A 4 postazioni tandem Prezzo: kEuro (monopostazione) possibilità intrinseca di scendere intorno 80 KEuro
 possibilità intrinseca di scendere intorno 80 KEuro.")
28
Obbligatoria la stabulazione libera su cuccette
Lay-Out di Stalla Per poter inserire in stalla un robot di mungitura sono necessari alcuni adattamenti che costituiscono il cosiddetto “LAY-OUT” della stalla automatizzata e che può essere più o meno rigido e vincolante per le bovine. Obbligatoria la stabulazione libera su cuccette

30
Lay-Out di Stalla

31
costi

32
costi

33
costi

34
Analisi multicriteriale
convenienza economica solo per mandrie molto produttive e se comparato con le sale di mungitura con costo di investimento più elevato modo differente di lavorare richiesto all’imprenditore o, comunque, al direttore dell’allevamento; il minor impiego di manodopera di bassa qualificazione, con conseguente diminuzione dei problemi organizzativi e, non da ultimo, della conflittualità aziendale; il prestigio sociale; la voglia di innovazione

35
Conclusioni Sotto il profilo tecnico: è necessaria una ulteriore semplificazione delle soluzioni sia meccaniche, sia elettroniche al fine di raggiungere: una maggiore affidabilità del sistema; un minor costo, o prezzo delle macchine e costi di gestione; un più facile approccio da parte degli addetti agricoli Sotto il profilo sociale: occorre preparare una nuova generazione di imprenditori e/o tecnici in grado di gestire le nuove tecnologie dell’automazione. In tutti casi, l’introduzione di queste consentirà di ridurre il gap tecnico-culturale del mondo agricolo rispetto agli altri settori.

Presentazioni simili





>")







 IL PUBBLICO DI CASTELLI.>")



>")


