Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Motore Asincrono (parte II) e Sincrono
Per allievi del CdL in Ing. Navale (aggiornato al 18 dicembre 2013)
")
2
Motore Asincrono Parte II
Funzionamento a frequenza variabile, frenatura, motore asincrono monofase, configurazioni costruttive

3
Funzionamento a frequenza variabile
C ≈ Rete Al variare della frequenza di alimentazione varia la velocità di sincronismo ωs=2πf/p e si modifica la caratteristica meccanica sul piano C-ωr. La regolazione della frequenza è utilizzabile sia per l’ avviamento che per la regolazione della velocità.

4
ωs=2πf/p Per un’assegnata caratteristica del carico, al variare di f si sposta il punto di lavoro. In tal modo la velocità può essere variata dal valore corrispondente alla massima frequenza applicabile fino a quasi zero, sulla base della frequenza minima ottenibile con il sistema di alimentazione.

5
Legge tensione-frequenza
La variazione di f comporta necessariamente anche la variazione della tensione di alimentazione del motore VS, al fine di ottimizzare l’impiego dei circuiti magnetici evitando la loro saturazione. Sono possibili diverse leggi di regolaz. VS=F(f). Molto usata è la legge VS/f=costante, adottata per contenere le variazioni del flusso Φ.
. Molto usata è la legge VS/f=costante, adottata per contenere le variazioni del flusso Φ.")
6
Infatti, trascurando la caduta di tensione nello statore la LKT
dello stesso è: La costanza di VS/f comporta pertanto la costanza di Φ. Per macchine di grande potenza (ad es. 1 MW) e per frequenze di alimentazione prossime a quella nominale, possiamo trascurare la resistenza statorica rS rispetto alla reattanza xt. In tale condizione anche la coppia di rovesciamento :
 e per frequenze. di alimentazione prossime a quella nominale, possiamo. trascurare la resistenza statorica rS rispetto alla reattanza xt. In tale condizione anche la coppia di rovesciamento :")
7
varia poco con f. Per macchine di potenza minore e per f<fn
rS non è trascurabile rispetto a xt=2πf(lσS+l’σR). La coppia di rovesciamento dedotta dal circuito equivalente a L è data da: Essa diminuisce per basse frequenze e può diventare anche più piccola della coppia nominale. Si ha quindi un appiattimento di C per valori bassi di f. L’entità dell’appiattimento è diverso a seconda della taglia del motore, poiché sono diversi i pesi relativi dei parametri resistivi ed induttivi.
. La coppia di. rovesciamento dedotta dal circuito equivalente a L è data da: Essa diminuisce per basse frequenze e può diventare anche. più piccola della coppia nominale. Si ha quindi un appiattimento di C per valori bassi di f. L’entità dell’appiattimento è diverso a seconda della taglia. del motore, poiché sono diversi i pesi relativi dei parametri. resistivi ed induttivi.")
8
Deflussaggio Per f>fn la tensione applicata
supererebbe il suo valore nominale. Essa però deve rimanere costante. Essendo: Se f aumenta e V è costante Φ diminuisce.

9
Compensazione della caduta sulla resistenza rS a basse frequenze.
Per migliorare l’appiattimento della coppia a bassa frequenza dovuto alla resistenza rS si aumenta la tensione per f<fn conservando la linearità della legge V-f. Sono spesso adottate altre leggi di alimentazioni V-f, calcolate, noti i parametri del circuito equivalente, per imporre specifiche condizioni (ad es. la costanza della coppia di rovesciamento CM).
.")
10
L’alimentazione del motore avviene tramite inverter o convertitori di frequenza per i quali la corrente non può superare una soglia critica e che pertanto sono dotati di un limitatore di corrente. Si definisce coppia limite Clim il valore della coppia del motore corrispondente alla corrente limite. La tensione d’uscita dell’inverter o del convertitore di frequenza è in genere periodica, ma non sinusoidale. V è il valore efficace della sua armonica fondamentale

11
Regolazione manuale della velocità
L’operatore fissa la frequenza f. Nella logica di controllo dell’inverter è implementata la legge V-f adottata

12
Regioni di funzionamento della macchina asincrona

13
Frenatura del Motore

14
Frenatura supersincrona (o da generatore)
Se si provoca la diminuzione della velocità di sincronismo del motore ωs portandola ad una velocità minore di quella di rotazione ωr, lo scorrimento s=(ωs- ωr)/ ωs e la coppia diventano negativi e la macchina funziona da generatore, restituendo energia alla rete. Poiché ωs=2πf/p, o si aumenta p o si diminuisce f. Raddoppiando p il punto di lavoro si sposta da P0 a P1. La velocità si dimezza quasi. Per arrestare il motore occorre agire su f.
/ ωs e la coppia diventano negativi. e la macchina funziona da generatore, restituendo energia alla rete. Poiché ωs=2πf/p, o si aumenta p o si diminuisce f. Raddoppiando p il punto. di lavoro si sposta da P0. a P1. La velocità si. dimezza quasi. Per. arrestare il motore. occorre agire su f.")
15
Frenatura supersincrona agendo su f (regolazione a scatti)
La coppia frenante oscilla in un intervallo la cui ampiezza dipende dai salti Δf con cui diminuisce la frequenza.

16
Frenatura elettrica Frenatura a inversione di fase (o in controcorrente) Scambiando una coppia di fasi di alimentazione s’inverte il verso di rotazione del campo rotante e, con esso, anche quello della coppia trasmessa all’albero. La coppia da motrice si trasforma in frenante. Negli avvolgimenti viene dissipata un’energia termica pari alla somma dell’energia elettrica fornita dalla rete e dell’energia cinetica delle masse in movimento. Nel caso di motori sottoposti a frequenti cicli di avviamento e frenatura si possono raggiungere temperature pericolose.

17
Motore asincrono monofase
Se non è disponibile l’alimentaz. trifase, per piccole potenze, da decine di W fino a pochi kW, è possibile l’uso del motore monofase, costituito da un rotore a gabbia e da uno statore monofase. Questo si può ad es. ottenere collegando in serie due fasi di un mot. trifase. %

18
Motore asincrono monofase
Se tale mot. trifase ha un avvolgim. trifase distribuito sulla superficie interna dello statore, 2/3 di tale superficie saranno occupati dall’avvolgim. principale monof. del mot. monof. L’altro terzo potrà essere occupato da un avvolgim. ausiliario utile per l’avviam. del motore.

19
Motore asincrono monofase, il campo magnetico pulsante
L’avvolgim. monofase crea il campo pulsante: essendo: il campo pulsante è esprimibile come somma di due campi Bd e Bi di ampiezza metà e rotanti in verso opposto con velocità ωc (ωc= ω/p).
.")
20
Scorrimenti rispetto al campo diretto Bd e inverso Bi
Il rotore, rotante con velocità +ωr, presenta lo scorrim. sd rispetto al campo diretto Bd rotante con veloc e rispetto al campo inverso Bi, rotante con veloc lo scorrim. si. La relaz. tra sd e si è: Assumendo come scorrim. principale s lo scorrim. sd, si ha:

21
Il motore asincrono monofase, la caratteristica elettromeccanica
Sul rotore agiscono la “coppia diretta” Cd creata da Bd concorde con e la “coppia inversa” Ci creata da Bi opposta a . Trascurando le interazioni tra Bd e Bi: dove è la coppia di un mot. trif. con lo stesso Ns del mot. monof. e:

22
Avviamento del motore monofase
La coppia d’avviam. (s=1) è nulla, poichè i due campi diretti ed inversi si equilibrano. Se il motore è avviato con veloc. ωr prevale il campo concorde con ωr. Il motore può essere avviato meccanicamente oppure elettricam. creando un campo rotante. Non essendo possibile creare un campo rotante trifase creato da un sistema simmetrico trifase di correnti, si può ricorrere ad un campo bifase creato dagli avvolgim. principale ed ausiliario.
 è nulla, poichè i due campi diretti ed inversi si equilibrano. Se il motore è avviato con veloc. ωr prevale il campo concorde con ωr. Il motore può essere avviato meccanicamente oppure elettricam. creando un campo rotante. Non essendo possibile creare un campo rotante trifase creato da un sistema simmetrico trifase di correnti, si può ricorrere ad un campo bifase creato dagli avvolgim. principale ed ausiliario.")
23
Campo bifase Il campo è creato dagli avvolgimenti principale ed ausiliario, i cui assi magnetici sono ortogonali e che sono attraversati dalle correnti ip ed ia, in quadratura : Se p=1 Campo principale Campo ausiliario Campo risultante

24
Motore monofase a condensatore
Per sfasare ia rispetto ad ip nell’avvolgimento ausiliario s’inserisce un condensatore C

25
Motore a poli tagliati

26
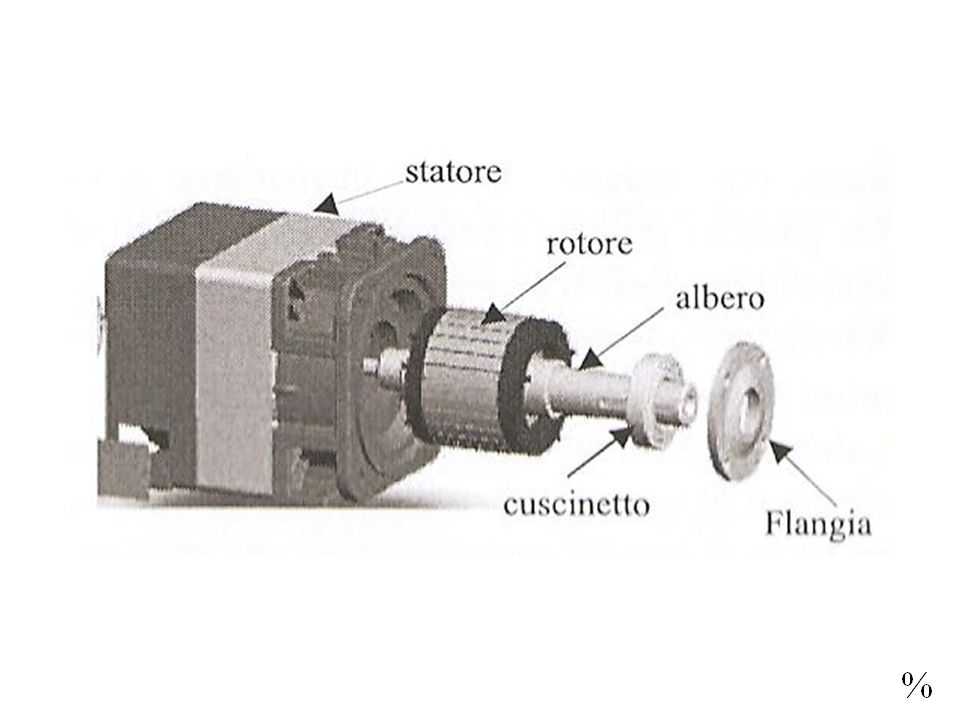
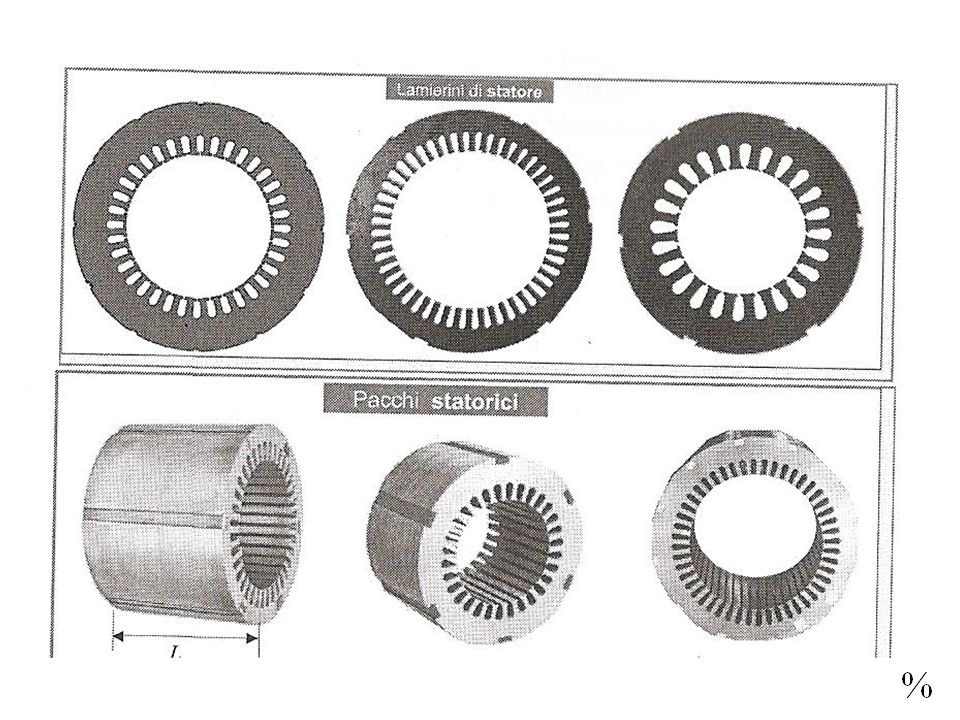
Configuraz. motore trifase

29
Rotore

30
Motore trifase

31
Motore asincrono monof. (p=1)
")
32
Motore asincrono monof. (p=2)
")
33
Sistemi elettrici per i trasporti
Motore Sincrono

34
Genesi del motore sincrono a rotore cilindrico (p=1)
Rotore rotante con velocità ωr Campo rotante con velocità ωc creato dalle correnti statoriche Nel motore asincrono Le fem rotoriche hanno pulsazione (ωc-ωr)=sω e sono date da:
=sω e sono date da:")
35
Se il rotore raggiunge la velocità di sincronismo ωc (ωr= ωc)
→ s=0 → fem e correnti rotoriche indotte si annullano → coppia motrice C si annulla → viene meno l’equilibrio dinamico tra C e la coppia di carico all’asse CL. Tale equilibrio si ripristina se nel rotore aggiungiamo un altro avvolgimento monofase attraversato da corrente continua Ie. Avvolgimento di eccitazione Alimentato in corrente continua La coppia motrice applicata al rotore è diversa da zero F=IeLB

36
Funzionamento in regime sincrono
La corrente di eccitazione Ie nel rotore determina un campo solidale con questo e quindi rotante alla velocità ωr= ωc → questo induce nello statore delle fem e0 a pulsazione ω, aggiuntive alle eS indotte dal campo rotante creato dalle correnti statoriche: Riferendosi ai fasori, si può porre: vedere diapositiva 32 oppure diapositiva 54 nell’ipotesi di s=0 e Rm=∞ (Pfe trascurabili)
")
37
La LKT nella fase 1 statorica è:
Reattanza sincrona Circuito equivalente Diagramma vettoriale

38
Calcolo della potenza e della coppia Trascurando la resistenza rS
AB=E0sinδ AB=CBsin(90-φ)= =XSIScosφ E0sinδ= XSIScosφ Iscosφ= E0sinδ/XS P=3VSIScosφ=3VS E0sinδ/XS Cem coppia δ angolo di potenza
= =XSIScosφ. E0sinδ= XSIScosφ. Iscosφ= E0sinδ/XS. P=3VSIScosφ=3VS E0sinδ/XS. Cem coppia. δ angolo di potenza.")
39
Il valore della coppia massima teoricamente sviluppabile
è dato quindi da: Esso può essere aumentato incrementando E0 e quindi sovraeccitando la macchina. A parità di E0 l’angolo di potenza δ è determinato dalla coppia resistente. Tale angolo dipende dalla posizione reciproca del campo rotante statorico e di quello rotorico (rotanti alla stessa velocità) e conseguentemente dalla fase della tensione e della posizione istantanea del rotore. A parità di δ lo sfasamento φ tra tensione e corrente dipende dal valore di E0. Sovraeccitando opportunamente la macchina essa può risultare un carico di tipo ohmico-capacitivo. Ciò si deduce dai due seguenti diagrammi vettoriali.
 e conseguentemente dalla fase della tensione e della posizione istantanea del rotore. A parità di δ lo sfasamento φ tra tensione e corrente dipende dal valore di E0. Sovraeccitando opportunamente la macchina essa può risultare un carico di tipo ohmico-capacitivo. Ciò si deduce dai due seguenti diagrammi vettoriali.")
40
φ<0 φ>0

41
Funzionamento da generatore
Facendo ruotare il rotore con un motore primo con velocità ωc ai morsetti statorici della fase 1 insorge la fem sinusoidale di pulsazione p ωc : Se la macchina funziona a vuoto tale fem coincide con la tensione esterna ai suoi capi; se tali morsetti sono collegati ad un carico esterno, essi erogano la corrente sinusoidale iS. Si ha pertanto Tale equazione è rappresentata dal circuito equivalente analogo a quello con cui si è rappresentato il funzionamento da motore:

42
Se il carico è ohmico-induttivo (iS in ritardo su vS) si ha il seguente diagramma vettoriale
Trascurando la resistenza rS , operando come per il motore, si perviene alla stessa espressione per la coppia elettromagnetica:

43
Poiché in questo caso il vettore rappresentativo della fem -e0 è in anticipo su quello della tensione vS , l’angolo di potenza δ è da considerarsi negativo e pertanto la coppi elettromotrice è negativa. Essa corrisponde infatti alla coppia resistente sviluppata dal generatore sincrono per equilibrare la coppia motrice applicata all’asse dal motore primo. Il generatore pertanto converte la potenza meccanica fornita all’asse dal motore primo in potenza elettrica trasferita al carico collegato ai morsetti esterni

44
Andata a regime del motore sincrono
In regime permanente la velocità del motore è quella di sincronismo. Per portare il motore a tale velocità possono essere impiegate diverse possibili tecniche: si utilizza un motore di lancio si alimenta il motore a frequenza variabile; questa varia con continuità a partire da valori molto bassi fino a giungere, con variazione molto lenta, alla frequenza nominale; sul rotore è posto oltre all’avvolgimento monofase d’eccitazione una gabbia, che consente l’avviamento in regime asincrono del motore

45
Avviamento asincrono del motore sincrono
Il campo rotante creato dalle correnti statoriche interagisce sia con la gabbia, producendo effetti analoghi a quelli del motore asincrono trifase, sia con l’avvolgimento monofase d’eccitazione. Se questo è attraversato dalla corrente stazionaria Ie si determina sul rotore una forza alternativa di pulsazione sω. Infatti il valore della forza Fk, agente su un generico conduttore rotorico attraversato dalla corrente stazionaria Ie e di posizione αk, è dato da:

46
Per evitare le oscillazioni che tale forza alternativa produrrebbe,
il circuito di eccitazione è alimentato con la corrente Ie solo quando il motore si trova nell’intorno della velocità di sincronismo. Delle oscillazioni transitorie comunque insorgono e sono smorzate dalla gabbia rotorica. Se il circuito monofase di eccitazione è chiuso, la sua interazione con il campo rotante statorico comunque modifica la caratteristica C-s. Avvolgimento di eccitazione

47
Il campo rotante creato dalle correnti statoriche, avente
velocità ωc=pω (campo rotante principale), induce nel circuito monofase d’eccitazione una corrente sinusoidale di pulsazione sω . Nasce così un campo pulsante con la stessa pulsazione e solidale con il rotore. Tale campo, può essere decomposto in due campi rotanti in verso opposto aventi velocità rispetto al rotore pari a sωc (campo diretto) e –sωc (campo inverso). Il campo diretto ha rispetto allo statore una velocità pari a sωc+ωr= ωc e produce pertanto effetti analoghi a quelli del campo principale. Il campo inverso ha una velocità rispetto allo statore pari a ω’= - sωc+ωr=(1-2s)ωc. Se s<0,5, ω’>0. Tale campo, agendo sullo statore, produce su questo una coppia oraria e per reazione una coppia sul rotore antioraria e pertanto di segno negativo. Per s=0,5, ω’=0 e non si ha
, induce nel. circuito monofase d’eccitazione una corrente sinusoidale. di pulsazione sω . Nasce così un campo pulsante con la stessa pulsazione e. solidale con il rotore. Tale campo, può essere decomposto in. due campi rotanti in verso opposto aventi velocità rispetto. al rotore pari a sωc (campo diretto) e –sωc (campo inverso). Il campo diretto ha rispetto allo statore una velocità pari a. sωc+ωr= ωc e produce pertanto effetti analoghi a quelli del. campo principale. Il campo inverso ha una velocità rispetto. allo statore pari a ω’= - sωc+ωr=(1-2s)ωc. Se s<0,5, ω’>0. Tale campo, agendo sullo statore, produce su questo una. coppia oraria e per reazione una coppia sul rotore antioraria. e pertanto di segno negativo. Per s=0,5, ω’=0 e non si ha.")
48
nessun effetto sulla coppia. Per s>0,5 il campo inverso
rotorico produce una componente di coppia che si somma a quella prodotta dal campo rotante principale. Cd coppia prodotta dal campo rotante principale Ci coppia prodotta dal campo di reazione inverso del circuito monofase di eccitazione

49
P’ e P’’ sono 2 possibili punti di lavoro corrispondenti a 2
possibili condizioni di carico. P’’ evidenzia una situazione eventuale di stallo che impedisce la sincronizzazione. Per evitare tale rischio l’avviamento asincrono può essere effettuato a circuito di eccitazione aperto oppure chiuso su una resistenza addizionale per limitare la corrente a pulsazione sω.

50
Oscillazioni pendolari
Delle oscillazioni meccaniche del rotore insorgono, oltre che nella fase di sincronizzazione, in conseguenza di variazioni della coppia resistente di carico. Si consideri p=1.

51
Σ L’equazione meccanica del moto è: J è il momento d’inerzia del
rotore Coppie agenti Σ Coppie agenti = Coppia sincrona + coppia asincrona-CL Coppia sincrona Coppia asincrona CL coppia resistente prodotta dal carico meccanico .

52
Coppia di smorzamento che si oppone alle variazioni di δ
L’equazione è analoga a quella che regola il movimento smorzato di un pendolo. Il rotore effettua quindi le cosiddette oscillazioni pendolari intorno alla velocità di sincronismo, smorzate dalla coppia asincrona esercitata dalla gabbia se esiste. Questa può essere dimensionata anche per l’avviamento asincrono del sincrono o soltanto per smorzare le oscillazioni pendolari. In tale caso prende il nome di gabbia smorzatrice.

53
Eccitazione del motore

54
Eccitazione senza l’impiego di un generatore ausiliario. Il
ponte si trova nello spazio fisso. La fornitura di corrente continua dal ponte all’avvolgimento di eccitazione avviene tramite un sistema di spazzole ed anelli

55
Il motore è definito “senza spazzole”. L’eccitatrice è una
macchina sincrona funzionante da generatore. In essa il . , circuito d’eccitazione in continua è nella parte fissa e

56
l’indotto trifase in alternata è montato in asse con il motore
da eccitare. Anche il ponte a diodi alimentato da tale indotto viene montato sul rotore del motore. Il sistema è compatto, stabile, affidabile, con ingombri relativamente limitati e senza i problemi di esercizio creati dalle spazzole. Le prime istallazioni sono state fatte a bordo degli aerei, che richiedevano bassi pesi ed alte velocità, che comportavano una forte usura delle spazzole. Oggi sono largamente diffusi con potenze sempre maggiori.

57
Configurazioni rotoriche
Rotore cilindrico Sul rotore è posto oltre all’avvolgimento d’eccitazione una gabbia simmetrica di smorzamento delle oscillazioni. Questa eventualmente può essere dimensionata per l’avviamento asincrono del motore.

58
Motore a poli salienti Sul rotore è posto oltre all’avvolgimento d’eccitazione una gabbia incompleta di smorzamento delle oscillazioni. Sia nella macchina liscia che a poli salienti l’avvolgimento d’eccitazione può essere sostituita da magneti permanenti.

59
Rotore a poli salienti

60
Rotore a poli salienti

61
Corpo statore

62
Impiego delle macchine asincrone e sincrone nella propulsione navale elettrica

63
Propulsione navale meccanica ed elettrica

64
Vantaggi della propulsione elettrica
Assenza della connessione meccanica tra motore primo e albero porta elica e conseguentemente dei riduttori meccanici Miglioramento del layout della nave, poiché non è più necessario mettere i grandi motori termici (gruppi diesel o turbine) in asse con l’elica ma soltanto i motori elettrici di dimensioni minori. Conseguente collocazione dei motori primi in posizioni più vantaggiose ai fini di una più razionale utilizzazione degli spazi interni e dello smaltimento dei fumi Riduzione di consumi ed emissioni Miglioramento delle vibrazioni che il motore primo trasmetteva allo scafo e conseguentemente del comfort dei passeggeri
 in asse con l’elica ma soltanto i motori elettrici di dimensioni minori. Conseguente collocazione dei motori primi in posizioni più vantaggiose ai fini di una più razionale utilizzazione degli spazi interni e dello smaltimento dei fumi. Riduzione di consumi ed emissioni. Miglioramento delle vibrazioni che il motore primo trasmetteva allo scafo e conseguentemente del comfort dei passeggeri.")
65
Largo impiego dell’elettronica di potenza con conseguente regolazione fine dell’azionamento, migliore flessibilità di manovra e crescenti livelli di automazione Conseguenti prestazioni dinamiche migliori della nave Incremento della sicurezza delle apparecchiature.

66
Principali campi d’impiego della propulsione elettrica
Le applicazioni oggi più diffuse sono le navi da crociera, rompighiaccio, navi oceanografiche, navi posacavi e posatubi, mezzi sottomarini, fregate. Il rapido sviluppo dell’elettronica di potenza, prospetta anche applicazioni per navi cisterna, navi da carico e traghetti

67
Schema semplificato dell’impianto elettrico di una nave AES (All Electric Ships)
")
68
La La propulsione elettrica prevede l’impiego per ogni elica di un azionamento formato da un motore elettrico in sostituzione del tradizionale motore diesel e di un convertitore statico atto ad alimentarlo ed a regolarne la velocità. L’ architettura di tipo “tutto elettrico” AES è fondata sul cosiddetto sistema elettrico integrato (IPS Integrated Power System) che comporta una radicale rivisitazione dell’impianto elettrico di bordo, il quale deve assicurare le necessarie capacità di generazione,regolazione,e distribuzione dell’e.e. a tutti gli utilizzatori. L’IPS racchiude la centrale elettrica di bordo, basata sull’insieme di generatori connessi ad una sbarra principale: da essa vengono alimentati,direttamente oppure tramite trasformatori o convertitori elettronici, tutti i carichi di bordo. .
 che comporta una radicale rivisitazione dell’impianto elettrico di bordo, il quale deve assicurare le necessarie capacità di generazione,regolazione,e distribuzione dell’e.e. a tutti gli utilizzatori. L’IPS racchiude la centrale elettrica di bordo, basata sull’insieme di generatori connessi ad una sbarra principale: da essa vengono alimentati,direttamente oppure tramite trasformatori o convertitori elettronici, tutti i carichi di bordo. .")
69
Confronto tra motore asincrono e sincrono
Vantaggi asincrono Vantaggi sincrono Versatilità Robustezza Elevata coppia anche a bassa velocità se opportunamente regolato Assenza di contatti striscianti Compattezza Basso costo Velocità di rotazione eguale alla velocità di sincronismo imposta dalla frequenza Fattore di potenza prossimo a 1 Regolazione fine della velocità Elevato traferro

70
Confronto tra motore asincrono e sincrono
Svantaggi asincrono Svantaggi sincrono Limitazione di potenza Corrente di spunto elevata in assenza di avviatore o sistemi di controllo Fattore di potenza minori di 1 Valori usuali di traferro minori di un sincrono di eguale taglia Presenza del circuito di eccitazione e suo alimentatore (eccetto i motori a magnete permanente) Maggiori oneri di manutenzione Maggiore ingombro e peso per potenze medie e piccole.
 Maggiori oneri di manutenzione. Maggiore ingombro e peso per potenze medie e piccole.")
71
I sistemi attualmente più diffusi sono basati sull’impiego di
Motore asincrono alimentato da un convertitore a circuito intermedio per una potenza massima per elica di 8-10 MW Motore sincrono alimentato da un cicloconvertitore per una potenza massima per elica di 30 MW

Presentazioni simili








 Reti Elettriche Parte II Revisione aggiornata al 24 maggio 2011 (www.elettrotecnica.unina.it)>")
>")
 Reti Elettriche Parte II Revisione aggiornata al 16 maggio 2011 (www.elettrotecnica.unina.it)>")
 Reti Elettriche Parte II Revisione aggiornata al 6 giugno 2012 (www.elettrotecnica.unina.it)>")







 I sensori di velocità>")