Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Scan conversione di poligoni
Daniele Marini

2
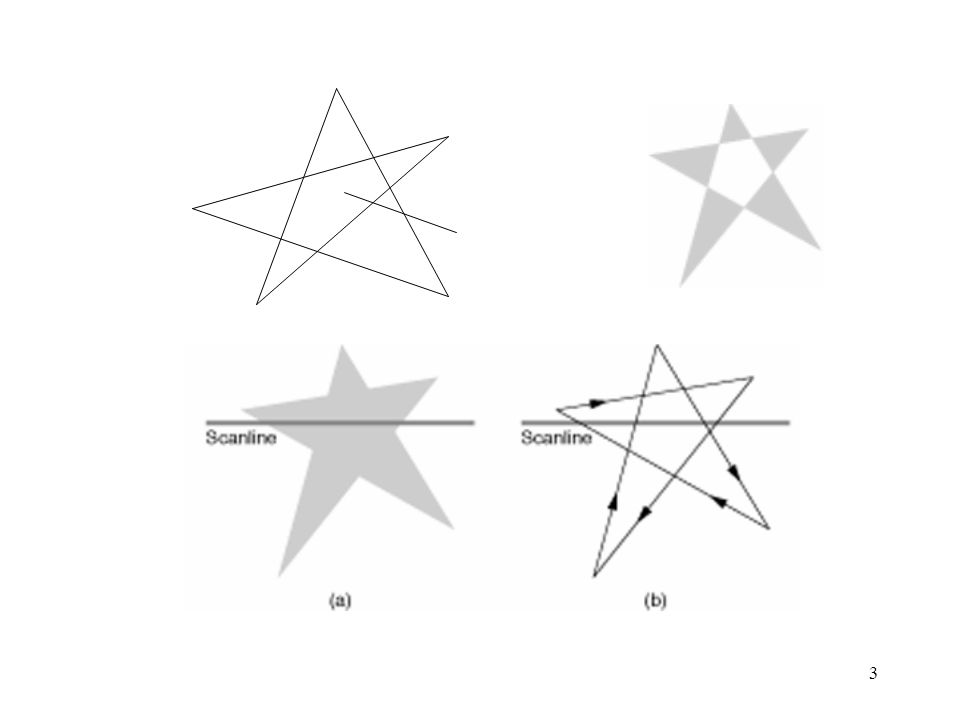
Test interno-esterno Scan conversione di un poligono = decidere se pixel interno Test di intersezione: se p è interno ogni semiretta da p interseca il poligono un numero dispari di volte se p è esterno le intersezioni sono pari
![]()
4
OpenGL OGL garantisce la scan conversione di poligoni convessi
creare modelli solo convessi triangolare (o tassellare) non troppo sottili o troppo lunghi più equilateri possibile (Delaunay)
 non troppo sottili o troppo lunghi. più equilateri possibile (Delaunay)")
5
Tassellazione: struttura generale
GLUtesselator * una_tassellazione; una_tassellazione = gluNewTess(); gluTessBeginPolygon(una_tassellazione, NULL); gluTessBeginContour(una_tassellazione); for (i=0; i<nvertici;i++) glTessVertex(una_tassellazione,vertex[i], vertex[i]); gluTessEndContour(); gluTessEndPolygon(una_tassellazione);
; gluTessBeginPolygon(una_tassellazione, NULL); gluTessBeginContour(una_tassellazione); for (i=0; i<nvertici;i++) glTessVertex(una_tassellazione,vertex[i], vertex[i]); gluTessEndContour(); gluTessEndPolygon(una_tassellazione);")
6
gluTessBeginPolygon(tess, NULL); gluTessBeginContour(tess);
gluTessVertex(tess, v1, v1); gluTessVertex(tess, v2, v2); gluTessVertex(tess, v3, v3); gluTessVertex(tess, v4, v4); gluTessEndContour(tess); gluNextContour(tess, GLU_INTERIOR); gluTessVertex(tess, v5, v5); gluTessVertex(tess, v6, v6); gluTessVertex(tess, v7, v7); gluTessEndPolygon(tess); v4 v3 v7 v5 v6 v1 v2
; gluTessVertex(tess, v2, v2); gluTessVertex(tess, v3, v3); gluTessVertex(tess, v4, v4); gluTessEndContour(tess); gluNextContour(tess, GLU_INTERIOR); gluTessVertex(tess, v5, v5); gluTessVertex(tess, v6, v6); gluTessVertex(tess, v7, v7); gluTessEndPolygon(tess); v4. v3. v7. v5. v6. v1. v2.")
7
v4 v3 v7 v5 v6 v1 v2 v4 v3 v7 v6 v5 v1 v2

8
Scan Conversione e z-buffer
Vertici e normali non clippate, trasformate per proiezione prospettica, (z esiste ancora!), computo del colore ai vertici …. resta da fare: Proiezione ortografica, rimozione superfici nascoste, shading: integrato tutto in z-buffer! Si procede per linee di scansione per ogni poligono, incrementando y e x in coordinate NDC e incrementando z in funzione dell’equazione del piano
, computo del colore ai vertici …. resta da fare: Proiezione ortografica, rimozione superfici nascoste, shading: integrato tutto in z-buffer! Si procede per linee di scansione per ogni poligono, incrementando y e x in coordinate NDC e incrementando z in funzione dell’equazione del piano.")
9
A ogni incremento di x e y si procede con interpolazione bilineare (Gouraud o Phong)
Durante questa fase si possono applicare texture.

10
Metodi alternativi Flood fill Scan line
Scan conversione dei bordi con Brasenham Dato un punto iniziale (seme) esplorare ricorsivamente il vicinato per decidere se i pixel sono esterni o interni Scan line Itera per y decrescenti (crescenti) decidi i poligoni attivi e il test interno-esterno
 esplorare ricorsivamente il vicinato per decidere se i pixel sono esterni o interni. Scan line. Itera per y decrescenti (crescenti) decidi i poligoni attivi e il test interno-esterno.")
11
Flood fill flood-fill(int x, int y); { if(read_pixel(x,y)==WHITE)
write_pixel(x,y,BLACK); flood_fill(x-1,y); flood_fill(x+1,y); flood_fill(x,y-1); flood_fill(x,y+1); }
![]()
12
Scan Line La regola interno-esterno permette di determinare “span”, tutti i pixel di uno span assumono lo stesso colore (o vengono interpolati per shading) I poligoni si organizzano in una lista di poligoni attivi e i bordi di un poligono attivo vengono organizzati in lista di bordi attivi
 I poligoni si organizzano in una lista di poligoni attivi e i bordi di un poligono attivo vengono organizzati in lista di bordi attivi.")
13
Scan conversione di linee
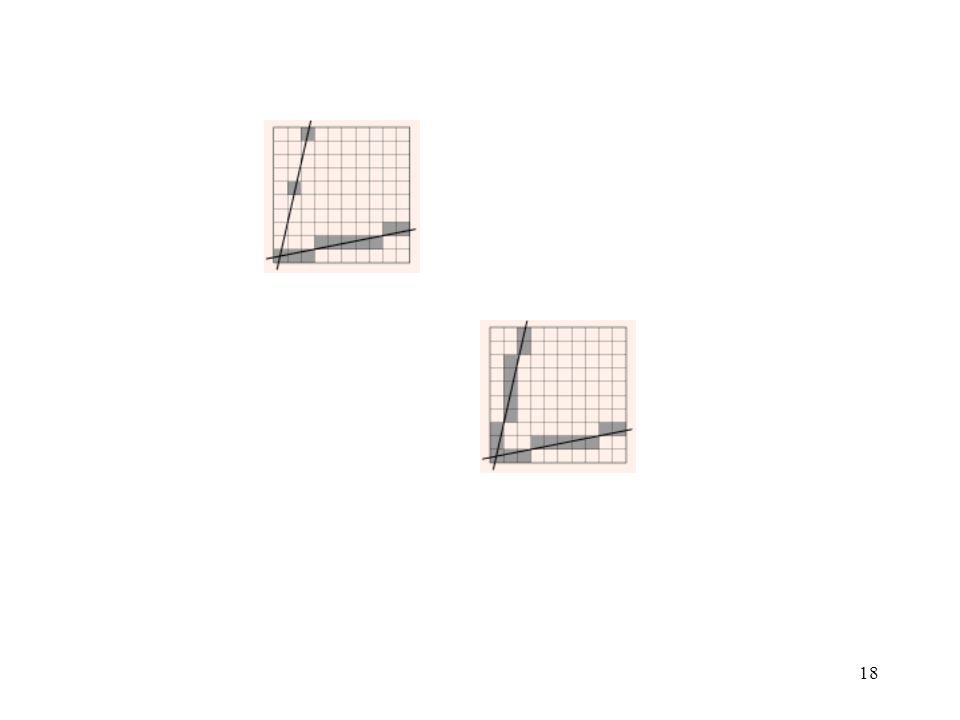
Convertire un segmento i cui estremi sono espressi come coppie di numeri reali, in una serie di PIXEL sullo schermo del computer. Problema di conversione da numero reale a intero e di campionamento su una griglia regolare di punti. Un metodo inadeguato dà luogo a “alias” molto evidenti; Aliasing è comunque sempre presente.

14
Requisiti Velocità luminosità uniforme stile linea antialiasing

15
Algoritmo base Calcola rapporto incrementale dy/dx
genera punti sulla retta con l’equazione esplicita: yi = mxi +b ad ogni passo arrotonda i valori all’intero prossimo: Round(yi)=Floor(0.5+yi) complessità alta: 1 moltiplicazione, 1 somma, 1 arrotondamento ad ogni passo
=Floor(0.5+yi) complessità alta: 1 moltiplicazione, 1 somma, 1 arrotondamento ad ogni passo.")
16
(xi+1, Round(yi+m)) (xi,yi) (xi, Round(yi)) (xi+1, yi+m)
) (xi,yi) (xi, Round(yi)) (xi+1, yi+m)")
17
L’algoritmo opera su rette con |m|<=1, e incrementa ad ogni passo x di una unità (rette con pendenza compresa tra -45° e +45°) Per |m|>1 si applica l’equazione x=f(y) e si incrementa (o decrementa) y di una unità
 e si incrementa (o decrementa) y di una unità.")
19
Metodo incrementale Si evita il prodotto
yi+1 = mxi+1 + b = m(xi + dx) + b = yi + mdx Se dx=1 allora yi+1 = yi + m questo metodo è chiamato DDA, Digital Differential Analyzer
 + b = yi + mdx. Se dx=1 allora yi+1 = yi + m. questo metodo è chiamato DDA, Digital Differential Analyzer.")
20
Algoritmo DDA procedure line(x0,y0,x1,y1:float; value:integer);
var x:integer; dx,dy,y,m: float; begin dy:=y1-y0; dx:=x1-x0; m:=dy/dx; y:=y0; for x:=x0 to x1 do begin WritePixel(x,Round(y),value); y:=y+m end end.
,value); y:=y+m. end. end.")
21
Il metodo di Brasenham Niente prodotti: solo somme e confronti semplici si basa sulla valutazione dell’errore sfrutta la conoscenza passata cfr. Foley, Van Dam et al.

22
Si assume 0<= m <=1 NE Q M E (xp,yp) L’algoritmo valuta NE-Q e E-Q, il segno decide se attivare E o NE

23
d = dy(xp+1)+ dx(yp+1/2) + dx
Per il segno e’ sufficiente vedere da che lato è M rispetto al segmento valutare l’equazione implicita della retta nel punto M: F(x,y): ax+by+c=0 dy=y1-y0, dx=x1-x0 quindi la F(x,y) è: dy.x + dx.y + dx = 0 occorre valutare la F(x,y) in (xp+1, yp+1/2) si adotta la variabile di decisione d: d = dy(xp+1)+ dx(yp+1/2) + dx
: ax+by+c=0. dy=y1-y0, dx=x1-x0 quindi la F(x,y) è: dy.x + dx.y + dx = 0. occorre valutare la F(x,y) in (xp+1, yp+1/2) si adotta la variabile di decisione d: d = dy(xp+1)+ dx(yp+1/2) + dx.")
24
Se d>0 seleziona NE Se d<=0 seleziona E Al passo successivo p+1 la scelta dipende dalla precedente: caso E - al passo prec. si è scelto E si incrementa M di una unità, la variabile di decisione si modifica: dnew = dold + dy

25
Caso NE - al passo prec. si è scelto NE, si incrementa M sia in y sia in x:
dnew = dold +dy-dx

26
Algoritmo di Brasenham (MidPointLine)
Procedure MidPointLine(x0,y0,x1,y1:float;value:integer); var dx,dy,deltaE,deltaNE,d,x,y:integer; begin dx:=x1-x0; dy:=y1-y0; d:= 2*dy - dx; {d_start} deltaE:=2*dy; deltaNE:=2*(dy-dx); x:=x0; y:=y0; WritePixel(x0,y0,value); while x<x1 do if d<=0 then d:=d+deltaE;x:=x+1 end else d:=d+deltaNE; x:=x+1; y:=y+1; end; WritePixel(x,y,value); end {while} end.
; var dx,dy,deltaE,deltaNE,d,x,y:integer; begin. dx:=x1-x0; dy:=y1-y0; d:= 2*dy - dx; {d_start} deltaE:=2*dy; deltaNE:=2*(dy-dx); x:=x0; y:=y0; WritePixel(x0,y0,value); while x<x1 do. if d<=0 then. d:=d+deltaE;x:=x+1. end. else. d:=d+deltaNE; x:=x+1; y:=y+1; end; WritePixel(x,y,value); end {while} end.")
Presentazioni simili