Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Software Defined Radio (SDR) a 144 MHz, come IF per i 10 GHz Jeffrey Pawlan (WA6KBL)
Maggio 2009

2
Introduzione e scopi La maggior parte dei transverter a 1296 ed oltre usano i 2 metri come IF per facilitare la reiezione dell’immagine. Per esempio, il transverter di DB6NT ha un OL a MHz, con risposta immagine a MHz; questa frequenza si trova ancora nei limiti della banda 144, con scarsa probabilità che un segnale intenso (commerciale o d’altro tipo) possa interferire. I filtri a cavità presenti nel transverter sono sufficienti ad eliminare il rumore in eccesso in ricezione e ad attenuare molto il segnale trasmesso a questa frequenza immagine.
 possa interferire. I filtri a cavità presenti nel transverter sono sufficienti ad eliminare il rumore in eccesso in ricezione e ad attenuare molto il segnale trasmesso a questa frequenza immagine.")
3
Per lungo tempo abbiamo usato vari tipi di ricevitori analogici multimodo in 2 metri come IF sintonizzabile. Fino adesso solo pochi hanno tentato l’uso di ricevitori SDR in portatile. Lars(AA6IW) ha usato il DSP-10 ed in seguito anche una variante commerciale di SDR costruita dalla Ten-Tec. Io stesso avevo modificato un QS1R Quicksilver, usandolo poi per alcuni collegamenti.

4
Recentemente ho acquistato un Perseus (microtelecom
Recentemente ho acquistato un Perseus (microtelecom.it), modificandolo quindi per il sottocampionamento. Ho usato l’apparecchio con la mia stazione portatile effettuando con successo dei collegamenti col programma Winrad ed un computer portatile. Le verifiche hanno mostrato che la rete di adattamento funzionava bene a 144 MHz ed era accettabile anche a 50 e 432 MHz.. Naturalmente occorrono anche un preamplificatore ed un preselettore esterni in funzione della banda desiderata.
, modificandolo quindi per il sottocampionamento. Ho usato l’apparecchio con la mia stazione portatile effettuando con successo dei collegamenti col programma Winrad ed un computer portatile. Le verifiche hanno mostrato che la rete di adattamento funzionava bene a 144 MHz ed era accettabile anche a 50 e 432 MHz.. Naturalmente occorrono anche un preamplificatore ed un preselettore esterni in funzione della banda desiderata.")
5
Il 9 Maggio 2009 ho ricevuto un invito a presentare l’ SDR per uso in microonde alla riunione annuale della IEEE MTT-S tenutasi al Laboratorio dell’acceleratore lineare di Stanford (CA). I partecipanti erano circa 100, alcuni seguivano dai loro tavoli ed altri si sono avvicinati osservando Winrad su uno schermo LCD ad alta luminosità. Il luogo delle prove non era ideale per la presenza di vegetazione nelle vicinanze e per la presenza di edifici che bloccavano alcune direzioni; tuttavia siamo riusciti a fare dei buoni collegamenti. Presento alcune foto dell’attività. (FOTO da 1 a 6)
")
8
La stazione completa. Manca solo il laptop

9
Puntando verso il monte Diablo attraverso la vegetazione

10
Difficile puntamento verso le colline “Oakland Hills” attraverso una casa

11
Il collegamento verso AA6HA era una rifrazione a lama di coltello attraverso la grande parabola di Stanford

12
Diagramma a blocchi del Transceiver dei 10GHz. :

13
Come funziona la sottocampionatura?
Tutti i campionatori digitali, inclusi i convertitori A/D, hanno la possibilità di sotto campionare. Il principio di Nyquist ci dice che è possibile acquisire e quindi ricostruire un segnale fino al 50% della cadenza di campionatura. Tutte le frequenze presenti all’ingresso di ogni campionatore, inclusi i convertitori A/D, saranno specchiate dentro la gamma che costituisce la normale copertura in frequenza, e cioè la Regione 1 di Nyquist. Nel caso di Perseus, la frequenza di campionatura è di 80 MHz; quindi la frequenza di Nyquist é 40 MHz., e la Regione 1 di Nyquist è di 0-40 MHz.

14
Escludendo il preselettore del Perseus, è possibile ricevere la frequenza di 50 MHz specchiata a 30 MHz. Qui siamo nella Regione 2 di Nyquist. Le regioni con numero pari vengono sovrapposte a quelle con numero dispari, proprio come con l’iniezione di segnali lato alto. La sintonia si fa quindi in senso retrogrado: ad esempio i 79 MHz si riceveranno quando la sintonia dell’RX è ad 1 MHz. La regione 3 di Nyquist si trova fra 80 e 120 MHz. Almeno un utente del Perseus ha ascoltato una stazione FM commerciale locale sintonizzandosi a 15 MHz. Dato che la regione ha numero dispari, la sintonia sarà diretta e non retrograda. La regione 4 di Nyquist va da 120 a 160 MHz. Così, se voglio ricevere i 144 MHz, la sintonia dovrà essere a 16 MHz, con spettro invertito.

15
Esiste ora una nuova versione di Winrad che contiene gli algoritmi appropriati per inviare a Perseus la frequenza corretta corrispondente a quella indicata sul display. E’ in grado, inoltre, di reinvertire lo spettro,in modo che le frequenze di ricezione in aumento appaiono sullo schermo da sinistra a destra, come normalmente avviene; in più la USB é demodulata correttamente come USB e non come LSB. La mia frequenza IF 144 MHz appare direttamente sullo schermo Winrad. Sarebbe anche possibile aggiungere dati dall’oscillatore locale per leggere direttamente i MHz, ma si genererebbero troppe cifre e la lettura sarebbe difficile.

16
Modificando Perseus Ho deciso di acquistare un secondo Perseus e modificarlo per la sottocampionatura per vari motivi. La progettazione del ricevitore è eccellente. La campionatura in uscita dalla FPGA varia fra 125 kHz e 2 MHz, con buona linearità e senza risposte spurie. Dunque, eventuali risposte spurie sono solo dovute al convertitore A/D e circuiti a monte. I drivers per Winrad sono eccellenti e funzionano sempre benissimo. Altro fattore importante è la mia passione per il progetto, la costruzione e la messa a punto di nuovi circuiti, quindi questo ha rappresentato una interessante sfida per me.

17
E’ importante ricordare che, una volta acquistato Perseus, se lo si modifica non si può più contare sull’assistenza della Microtelecom. Il Perseus contiene un amplificatore differenziale che deve essere rimosso o disconnesso, in quanto non ha la larghezza di banda necessaria per operare a 144 MHz. Anche il preselettore copre solo le HF. Il convertitore A/D è un Linear Technology LTC (datasheet su Il datasheet contiene gli elementi necessari per le modifiche da apportare. Lo schema dell’apparecchio è proprietario della Microtelecom, ma non è indispensabile per la modifica.

18
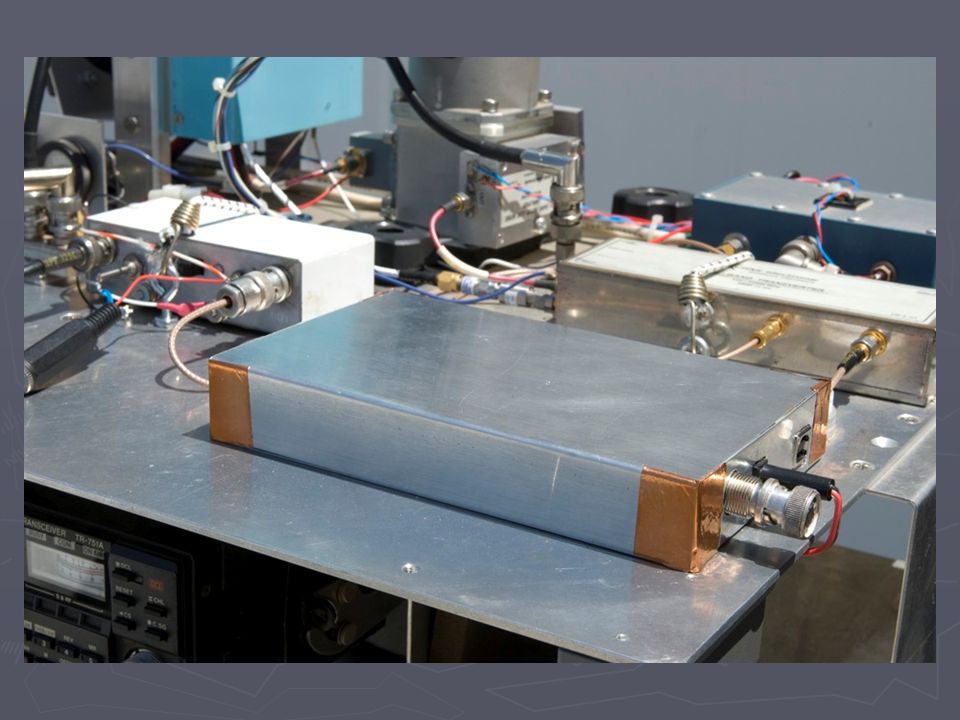
Un problema da affrontare per la rimozione dell’amplificatore differenziale e dei suoi componenti è che le saldature sono fatte con stagno ROHS privo di piombo, cosicché il punto di fusione delle stesse è superiore a quello dello stagno normale di circa 30 C. Io uso correnti localizzate di aria calda, riscaldando il circuito da entrambi i lati con ugelli appositi. Non è semplicissimo rimuovere questi componenti senza danneggiare altri componenti vicini. Ho dovuto aggiungere un trasformatore sbilanciato/bilanciato e cambiare alcuni componenti di adattamento. L’ ingresso al ricevitore è fatto adesso con uno spezzone di cavo teflon RG316/U ed un connettore BNC adatto. Il tutto è contenuto in una scatola metallica schermante. (foto 7-8)
")
20
Vista finale del contenitore speciale di Perseus

21
Qualche dettaglio sulle prove al banco
Dato che il ricevitore è del tipo a campionamento digitale diretto, non ha senso fare il test di IMD a due toni. Come sostituzione, ho determinato la soglia di rumore, misurando quindi il minimo segnale ricevibile con un preamplificatore a due stadi MOSFET a 144 MHz e con il transverter 10 GHz. A 144 MHz, senza preamplificazione, ho potuto determinare il range dinamico con tono singolo, ed era circa 80 dB, legato ad un prodotto del quarto ordine. Il range dinamico è inferiore a quello desunto dal datasheet del convertitore A/D LTC, ma può essere migliorato con una base dei tempi a jitter più basso ed ottimizzando i circuiti di adattamento all’ingresso.

22
Il segnale minimo ricevibile in 2 metri ed anche in 3 cm
Il segnale minimo ricevibile in 2 metri ed anche in 3 cm. è risultato attorno a -140dBm, prestazione che va benissimo in ambiente non elettricamente troppo rumoroso. Il guadagno del preamplificatore è stato regolato a 20 dB. Il preamplificatore doppio stadio a MOSFET per 144 che ho usato non ha una grande dinamica, ma ha circuiti di ingresso ed uscita ad alta impedenza con buona selettività. E’ importante di evitare l’arrivo di segnali fuori della banda 144 MHz. al convertitore A/D altrimenti si ritroveranno in banda desiderata. Misure fatte a 432 MHz, senza preamplificatore, indicano che il convertitore A/D e la rete di adattamento determinano una perdita di soli 3 dB rispetto ai 144. Penso di sviluppare il concetto per progetti futuri in 432.

23
Altri sviluppi futuri Conto di modificare Perseus usando una base dei tempi esterna con basso rumore di fase e basso jitter, agganciata in fase ad un riferimento a 10 MHz. Ciò dovrebbe migliorare la dinamica. Sto realizzando anche un trasmettitore SDR che possa totalmente sostituire il trasmettitore analogico che uso attualmente. In un futuro non lontano, dovrebbero essere disponibili ricevitori a campionamento diretto con frequenza di campionamento di oltre 300 MHz. Il sottocampionamento aumenta il jitter della base tempi, il rumore relativo ed anche i problemi di campionamento e mantenimento (sample and hold) del convertitore A/D. Ad ogni modo, non è detto che un convertitore A/D con una frequenza di campionamento molto alta funzioni meglio perché il numero effettivo di bit ed il range dinamico esente da spurie tendono a diminuire con l’aumento della frequenza di campionamento.
 del convertitore A/D. Ad ogni modo, non è detto che un convertitore A/D con una frequenza di campionamento molto alta funzioni meglio perché il numero effettivo di bit ed il range dinamico esente da spurie tendono a diminuire con l’aumento della frequenza di campionamento.")
24
73, Jeffrey Pawlan IEEE Senior Member WA6KBL or

25
Giancarlo Moda, I7SWX, sezione ARI di Cassano delle Murge BA – IQ7MU
Crediti Ringrazio la IEEE MTT-S e il socio Michael Forman per le sue ottime fotografie Un ringraziamento ai seguenti membri del 50MHz & Up Group of N. Calif. che hanno contribuito ai contatti per la mia dimostrazione: Randy Neals KI6TWT Brian Yee W6BY Jim Moss N9JIM John Ekiss AA6HA A Nico Palermo, IV3NWV, progettista del ricevitore Perseus A Charles Buse HB9EGW per il suo lavoro e per le migliorie apportate al programma Winrad, a Alberto I2PHD per il suo lavoro concedendo il sorgente del progetto originale Winrad. Traduzione di I5CTE Piero Questa presentazione puo’ essere utilizzata e pubblicata liberamente, come autorizzato da Jeffrey Pawlan , WA6KBL, a: Giancarlo Moda, I7SWX, sezione ARI di Cassano delle Murge BA – IQ7MU non apportando modifiche non autorizzate e mantenendo il copyright di Jeffrey Pawlan, WA6KBL

Presentazioni simili



















 DIGITALE-ANALOGICI (DAC)>")
 DIGITALE-ANALOGICI (DAC)>")
 DIGITALE-ANALOGICI (DAC)>")