Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Universita degli studi di roma “tor vergata”
Corso di laurea magistrale in Ingegneria Medica Corso di bioprotesi studenti Emanuela girolami Francesca tramontana Docente Ettore pennestri

2
Protesi di mano

3
introduzione Il brevetto scelto riguarda un meccanismo protesico di mano per persone con amputazione a livello della giunzione metacarpofalangea o con amputazione totale. Giunzione metacarpofalangea

4
Introduzione Per la realizzazione delle seguenti immagini è stata utilizzata la funzione di rendering negli strumenti photoworks

5
introduzione La protesi include un meccanismo di presa grazie alla presenza di due membri, dita e pollice, uniti cinematicamente tra loro. Il meccanismo di presa è azionato da un motore connesso ad un riduttore epicicloidale. Il motore esplica una coppia di 19.63Nm tra le dita e il pollice ed è collegato mediante elettrodi al moncone.

6
introduzione Il motore è alimentato da una batteria ricaricabile di 9 V. La protesi esternamente è ricoperta da un guanto che la rende simile, esteticamente, ad una vera mano.

7
Controllo mioelettrico
Il meccanismo utilizza come sensori degli elettrodi superficiali posti sopra il livello di amputazione, a contatto con la cute del moncone, che rilevano la contrazione volontaria del muscolo sottostante. Condizioni necessarie per utilizzo di sEMG sono: Ampiezza tale da essere riconosciuto dal sensore Il paziente deve generare della contrazioni indipendenti,poiché la protesi ha un funzionamento errato se riceve due ordini contrastanti Il segnale viene inviato ad un algoritmo che, traducendo la volontà del paziente, decide il movimento che deve essere attuato: attivazione m. estensore dell’avambraccio = apertura mano attivazione m. flessore dell’avambraccio = chiusura mano Dispositivi di controllo protesi: ON-OFF = il motore si attiva sempre con la stessa potenza

8
Assieme esploso

9
Descrizione componenti
La parte più interna della protesi è costituita dal motore e dal riduttore epicicloidale. Il riduttore è composto da una serie di ingranaggi con ruote solari circondate da tre satelliti ognuna.

10
Descrizione dei componenti primo rotismo
128 corona 108 pignone motore 122a satelliti 131 122b 133 122c 140 pignone uscita

11
Descrizione componenti
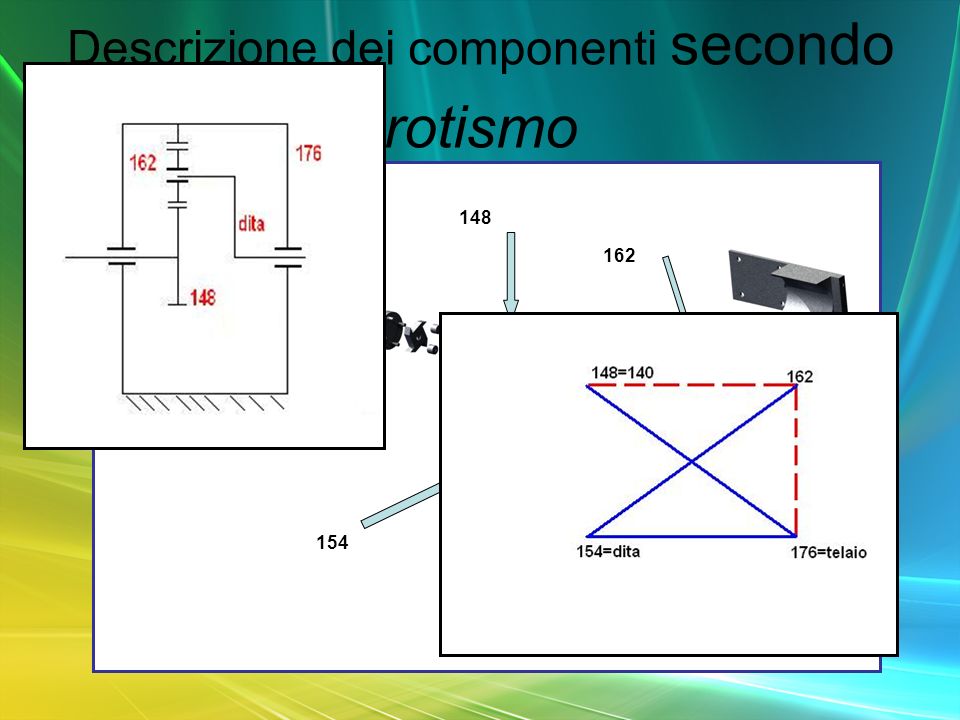
Successivamente al riduttore è presente un meccanismo detto “Silent Ratchet”, che consente la chiusura della protesi quando il motore ruota in senso antiorario e limita il movimento di apertura per una rotazione oraria del motore. In uscita è presente un solare circondato da sei satelliti che trasmette il moto alle dita. Il moto delle dita è trasmesso al pollice tramite un quadrilatero articolato.

12
Descrizione dei componenti secondo rotismo
148 162 154 176
13
Analisi cinematica Velocità angolare dita = 0.0152 * velocità motore
• %%%%%%%%%%%%%calcolo cinematico prima parte syms omega122A omega122B omega122C omega131 omega132 omega133 omegaMOTOR ; %inizializzazione del vettore delle incognite incog1=[omega122A; omega122B; omega122C; omega131; omega132; omega133]; del vettore dei termini noti noto1=[ - 0; 0]; %matrice delle soluzioni matrix1=[7/ (1+7/8) ; 0 7/ (1+7/8); / (1+7/8) ; 7/ (1 7/23); 7/ 7/23) 0; 7/ 7/23) ]; %calcolo della soluzione mat_inv1=inv(matrix1); soluz1=mat_inv1*noto1; seconda parte omegaFINGER omega162; omega140=soluz1(5); incog2=[ omega162]; noto2=[ omega140; matrix2=[ 3/2 1/2; 3 4 ]; mat_inv2=inv(matrix2); soluz2=mat_inv2*noto2; omegaFINGER=soluz2(1) %%%%%%%%%%%%%%calcolo della coppia uscente coppiaIN coppiaOUT=omegaMOTOR*coppiaIN/ Velocità angolare dita = * velocità motore Coppia in uscita = * coppia in ingresso
 0 0; 0 7/ (1+7/8); 0 0 7/8 0. (1+7/8) 1 ; 7/ (1. 7/23); / /23) 0; 7/ /23) 0 0 ]; %calcolo. della soluzione. mat_inv1=inv(matrix1); soluz1=mat_inv1*noto1; seconda parte. omegaFINGER. omega162; omega140=soluz1(5); incog2=[ omega162]; noto2=[ omega140; matrix2=[ 3/2 1/2; 3. 4 ]; mat_inv2=inv(matrix2); soluz2=mat_inv2*noto2; omegaFINGER=soluz2(1) %%%%%%%%%%%%%%calcolo della coppia uscente. coppiaIN. coppiaOUT=omegaMOTOR*coppiaIN/ Velocità angolare dita = * velocità motore. Coppia in uscita = * coppia in ingresso.")
14
Analisi cinematica Velocità motore=83.3 gradi/sec
omega122A -128/217*omegaMOTORE -49,14 omega122B -1024/6727*omegaMOTORE -12,68 omega122C *omegaMOTORE -3,272 omega131 8/31*omegaMOTORE 21,5 Omega133 64/961*omegaMOTORE 5,548 Omega140 512/29791*omegaMOTORE 1,432 omegaFINGER 4096/268119*omegaMOTORE 1,273 omega162 1024/89373*omegaMOTORE 0,954 Velocità motore=83.3 gradi/sec velocità angolare dita = gradi/sec Coppia in ingresso = 0.3 Nm coppia in uscita = Nm

15
Riduttore epicicloidale

16
Progettazione Quadrilatero articolato risolto con la condizione :
Velocità pollice = velocità dita

17
Progettazione Nota configurazione iniziale: AB=18.93 mm ad=57.53 mm
Teta=78° Si impone Analisi polare: omegaPollice X P14P24 =omegadita X P12P24 Attraverso considerazioni geometriche si ottiene P12P24=28.75mm Alfa=36.74° CD=18.93 mm BP24=30.96 mm & BC=61.93 mm

18
Calcolo delle polari

19
apertura Theta = 282 ° Theta = 252 ° theta phi gamma xp yp Xp Yp 282
36,738 282,19 -3554,3 16722 278 36,642 286,06 -53,585 390,77 -54,886 390,54 274 36,377 289,7 -11,352 200,1 -13,967 199,74 270 35,956 293,12 3,9358 135,18 1,44E-13 134,76 266 35,396 296,34 12,376 102,18 7,1193 101,81 262 34,709 299,38 18,062 81,995 11,491 81,765 258 33,908 302,25 22,369 68,204 14,497 254 33,005 304,95 25,889 58,042 16,735 58,362 Theta = 282 ° Theta = 252 °

20
Chiusura Theta = 312 ° Theta = 282 ° theta phi gamma xp yp Xp Yp 282
36,738 282,19 -3554,3 16722 286 36,645 278,06 112,41 -396,82 113,7 -396,5 290 36,346 273,65 67,231 -192,42 69,769 -191,69 294 35,819 268,93 51,447 -125,23 55,211 -124,01 298 35,041 263,85 42,881 -91,762 47,833 -89,96 302 33,984 258,36 37,168 -71,7 43,264 -69,237 306 32,614 252,39 32,845 -58,306 40,036 -55,105 310 30,888 245,83 29,252 -48,686 37,484 -44,671 Theta = 312 ° Theta = 282 °

21
Analisi cinematica Il movimento è stato realizzato utilizzando Cosmos Motion

22
Analisi cinematica Per riprodurre il movimento si è semplificato il modello. Si sono usati dei contatti 3D tra le zone in cui erano presenti dei perni poiché questi non partecipano alla cinematica del corpo. Tra il pignone e i satelliti sono stati inseriti dei Couplers per l’ingranamento delle ruote. Alla cerniera rappresentante il pignone è stata assegnata una funzione armonica per lo spostamento.

23
Analisi cinematica

24
Analisi cinematica Anche per il movimento del riduttore epicicloidale è stato usato Cosmos Motion.

25
Analisi cinematica Il rotismo è semplificato: i solari ingranano con un solo satellite, invece dei tre riportati realmente, per evitare la presenza di elementi ridondanti. Al pignone sull’albero motore è stata assegnata una velocità angolare di 5000 gradi/sec. Tra i componenti del rotismo sono stati usati dei couplers per l’ingranamento.

26
Analisi statica Materiale utilizzato = TITANIO
Modulo elastico 1,9e11 n/m^2 Modulo di taglio 4,3e11 n/m^2 Densità di massa 4600 kg/m^3 Resistenza a trazione 235e6 n/m^2 Carico di snervamento 140e6 n/m^2

27
Analisi statica Volume della protesi = 102808.02 millimetri cubici
Peso della protesi = grammi

28
Analisi statica Eliminato rotismo di connessione delle dita con il telaio,sostituito da contatto a parti unite Eseguita analisi in modalita grandi spostamenti Simulata azione di afferraggio oggetto con peso di 500 grammi Peso bloccato ai membri attraverso Contatto di gruppo a parti unite tra pollice e carico dita e carico Eliminati perni di connessione fisici della struttura,sostituiti con connettori a perno

29
Risultati sollecitazione

30
Risultati sollecitazione
Controllo progetto Sollecitazione massima sui componenti<sollecitazione limite titanio Sollecitazione max = 10,6 e 06 Carico snervamento titanio =140 e 06 FOS = fattore di sicurezza fos minimo = 13,2 (sul pollice) fos minimo = 48,9 (sul telaio)
 fos minimo = 48,9 (sul telaio)")
31
Risultati deformazione

32
Risultati spostamento

33
fine Recapiti emanuela francesca

Presentazioni simili
















2HPO4 è … 132 g 114 g>")


