PROGRAMMAZIONE DI UN CENTRO DI LAVORAZIONE A CONTROLLO NUMERICO Ultimo aggiornamento: 11/11/11 Prof. Gino Dini – Università di Pisa
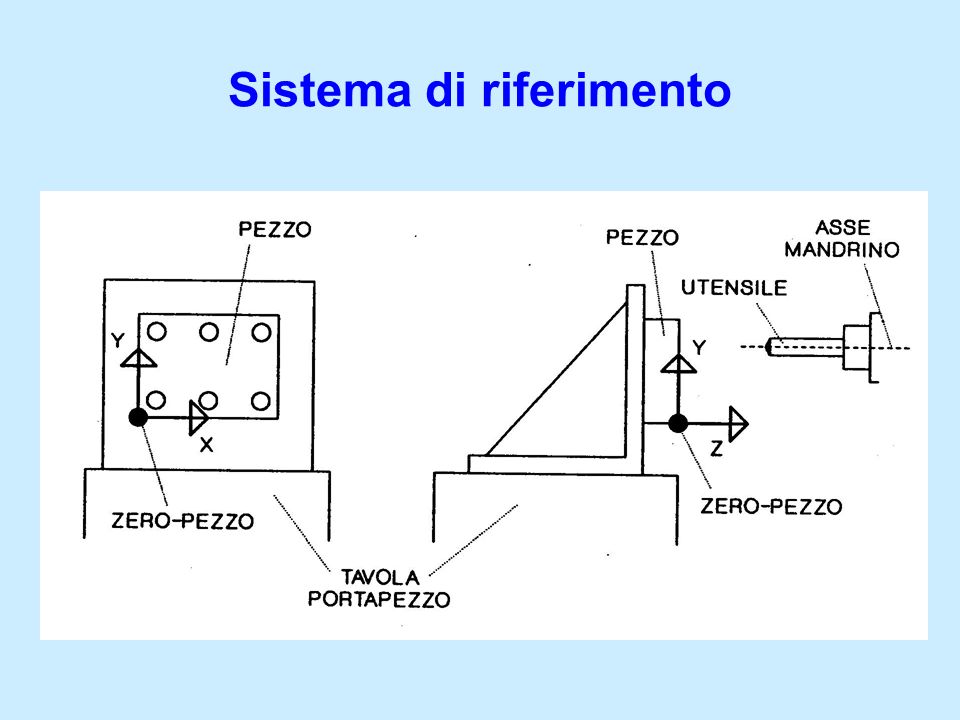
Sistema di riferimento
Sistema di riferimento y z x y zero macchina x zero pezzo z
Programmazione manuale Linguaggio utilizzato Linguaggio ISO Linguaggio non ISO (specifico della UG)
Operazione di foratura
Operazione di fresatura
Cicli fissi: quote programmabili
Ciclo fisso di foratura G81
Ciclo fisso di foratura profonda G83
Ciclo fisso di maschiatura G84
Programmazione manuale Linguaggio utilizzato Linguaggio ISO Linguaggio non ISO (specifico della UG)
Modifica del sistema di riferimento
Uso della funzione Mirror
Utilizzo delle variabili
Utilizzo delle variabili
Utilizzo degli assi rotativi
Utilizzo degli assi rotativi
Programmazione di contornature
Linguaggio GTL: definizione di punti
Linguaggio GTL: definizione di rette
Linguaggio GTL: definizione di cerchi
Profilo aperto e profilo chiuso
Compensazione diametro utensile G41 G40 Fresa y G42 Profilo programmato x
Utilizzo della funzione s2
Punto di inizio contornatura
Operazione di contornatura
Operazione di tastatura
Operazione di tastatura