Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
PROBLEMA DI SAINT-VENANT

2
Il problema particolare di equilibrio elastico di notevole interesse applicativo è quello di un solido elastico, omogeneo, isotropo di forma cilindrica, ossia un solido che possiamo chiamare, almeno per la sua forma, trave. Il problema è stato impostato e risolto da Adhémar Jean-Claude Barré, conte di Saint-Venant, nella famosa memoria “De la torsion des prismes” presentata all’Accademia delle Scienze di Parigi nel 1853. trave sezione trasversale Il metodo proposto dal Saint-Venant, professore all’Ècole des ponts et Chaussées, per risolvere il problema unisce al rigore matematico l’intuizione fisica del problema. Inizia uno dei capitoli più suggestivi della Scienza delle Costruzioni, proponendo una soluzione fondamentale per la portata pratica e stimolante per la congettura (postulato) fatta per giustificare il procedimento proposto. Tale congettura, ha rappresentato una vera sfida per tutti coloro che ne hanno tentato una rigorosa dimostrazione. Il modello, può apparire piuttosto lontano dalla realtà; esso invece, proprio grazie all’accennata congettura di Saint-Venant, è in grado di descrivere il comportamento di molte travi reali.
 fatta per giustificare il procedimento proposto. Tale congettura, ha rappresentato una vera sfida per tutti coloro che ne hanno tentato una rigorosa dimostrazione. Il modello, può apparire piuttosto lontano dalla realtà; esso invece, proprio grazie all’accennata congettura di Saint-Venant, è in grado di descrivere il comportamento di molte travi reali.")
3
Ipotesi Generali Il probema di Saint-Venant si basa sulle seguenti ipotesi: 1) ipotesi di tipo geometrico: si considera una trave prismatica (asse rettilineo e sezione retta costante). Nella sezione la dimensione minima e massima non sono troppo differenti l’una dall’altra; la lunghezza della trave è molto più grande delle dimensioni della sezione retta. Assumeremo un riferimento cartesiano ortogonale con l’asse z coincidente con l’asse della trave e origine nel baricentro G della sezione . 2) ipotesi sul materiale: si considera il materiale elastico, lineare, omogeneo, isotropo. 3) ipotesi sui carichi: si considerano le forze di massa nulle e le forze di superficie agenti solo sulle basi e la superficie laterale della trave risulta scarica mentre le forze di superficie costituiscono da sole un sistema equilibrato.
 ipotesi di tipo geometrico: si considera una trave prismatica (asse rettilineo e sezione retta costante). Nella sezione la dimensione minima e massima non sono troppo differenti l’una dall’altra; la lunghezza della trave è molto più grande delle dimensioni della sezione retta. Assumeremo un riferimento cartesiano ortogonale con l’asse z coincidente con l’asse della trave e origine nel baricentro G della sezione . 2) ipotesi sul materiale: si considera il materiale elastico, lineare, omogeneo, isotropo. 3) ipotesi sui carichi: si considerano le forze di massa nulle e le forze di superficie agenti solo sulle basi e la superficie laterale della trave risulta scarica mentre le forze di superficie costituiscono da sole un sistema equilibrato.")
4
4) ipotesi sui vincoli: si considera il solido non vincolato coerentemente con l’ipotesi di sistema di forze equilibrato. Tuttavia, per fissare la posizione del solido nello spazio, impedendo qualunque moto rigido, supporremo che: x z Assi principali d’inerzia y x y

5
5) ipotesi sulle tensioni: si considera che
segue che, ossia il tensore degli sforzi è del tipo che descrive uno stato di tensione bi-assiale. Il piano del vettore tensione è quello contenente i vettori e esso è perciò parallelo all’asse del cilindro. Come si vede il modello di Saint-Venant, nel caso più generale, comporta quindi la riduzione da 6 a 3 del numero delle incognite di tensione. → → →

6
Occorre naturalmente rendersi conto che questa “ipotesi sulle tensioni” è una previsione sulla soluzione. Equazioni costitutive Le equazioni costitutive del solido elastico, lineare, isotropo scritte con riferimento alle due costanti elastiche E, modulo di elasticità normale, e , coefficiente di contrazione trasversale, si riducono a

7
I quattro casi fondamentali di sollecitazione
1) Forza Normale Semplice 2) Flessione Semplice 3) Torsione
 Forza Normale Semplice. 2) Flessione Semplice. 3) Torsione.")
8
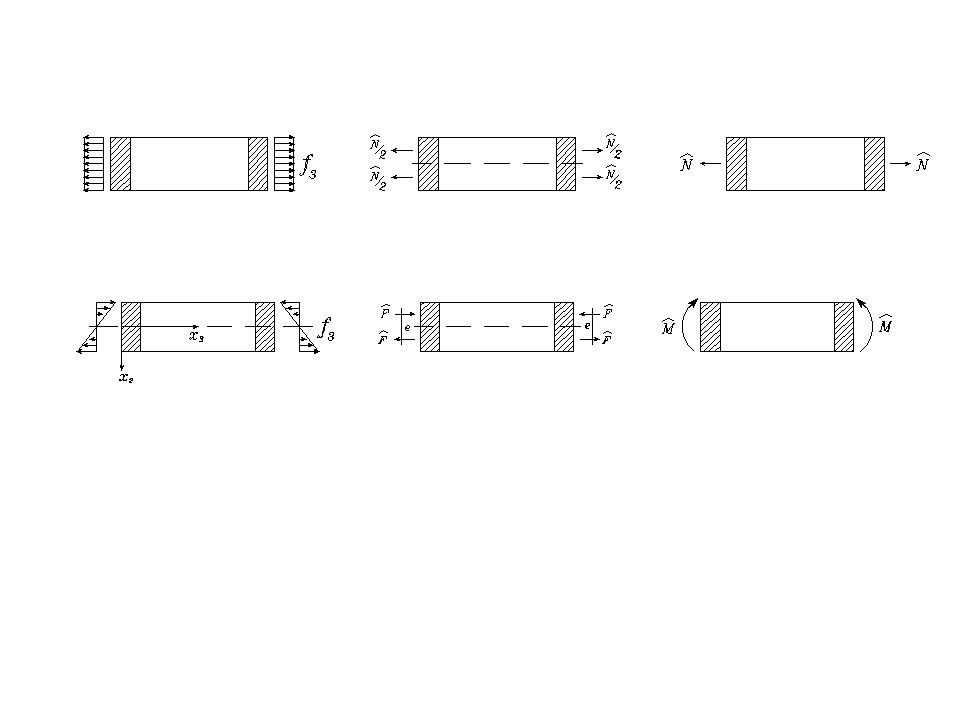
4) Flessione Composta Il principio di Saint-Venant Ciò che si conosce delle azioni superficiali applicate sulle travi sono semplicemente dei sistemi di forze staticamente equivalenti, in genere ridotti ad una risultante R e ad un momento risultante M. Su questo punto Saint-Venant, con riferimento al suo modello di trave, propose un principio: se una distribuzione di forze superficiali agenti su una porzione della superficie di un corpo è sostituita da un’altra agente sulla stessa porzione di superficie, gli effetti prodotti dalle due distribuzioni in punti sufficientemente distanti dalla zona di applicazione della forza sono gli stessi purché le due distribuzioni di forze siano staticamente equivalenti, ossia abbiamo la stessa risultante e lo stesso momento risultante.

10
se una distribuzione di forze superficiali agenti su una porzione della superficie di un corpo è sostituita da un’altra agente sulla stessa porzione di superficie, gli effetti prodotti dalle due distribuzioni in punti sufficientemente distanti dalla zona di applicazione della forza sono gli stessi purché le due distribuzioni di forze siano staticamente equivalenti, ossia abbiamo la stessa risultante e lo stesso momento risultante.

11
analisi numeriche agli elementi finiti che evidenziano il campo tensionale in elementi sollecitati da forze normali, e forze di taglio; ciascuna sollecitazione è ottenuta con una diversa distribuzione delle forze che tuttavia hanno la stessa risultante.

12
Forza Normale Semplice o Azione Assiale
y In questo caso in ogni sezione della trave avremo la sola presenza di forza normale. Assumiamo, sulla base dell’intuizione fisica, che in ogni tensione le tensioni siano Le condizioni al contorno sulle basi sono:

13
Il tensore delle tensioni si riduce a:
e lo stato di tensione risulta essere monoassiale.

14
Stato di deformazione Dalle equazioni costitutive si ottiene immediatamente, per il tensore delle deformazioni la seguente espressione : Facendo riferimento alle espressioni generali già considerate in precedenza si ottiene la variazione di lunghezza: Si vede quindi che ad una forza di trazione (N > 0) corrisponde un aumento della lunghezza della trave; l’opposto si verifica nel caso di compressione (N < 0).
 corrisponde un aumento della lunghezza della trave; l’opposto si verifica nel caso di compressione (N < 0).")
15
Caratteristica di deformazione assiale
Le sezioni della trave, nel caso della sollecitazione a forza normale restano piane e compiono una semplice traslazione nella direzione dell’asse . Questo risultato consente di descrivere il movimento della generica sezione retta attraverso la caratteristica di deformazione assiale, che si indica con ε, che è definita come lo spostamento relativo tra due sezioni poste a distanza unitaria, ossia :

16
Flessione Semplice (Pura)
Si ha flessione semplice attorno all’asse x quando : Cioè si ha solo un vettore momento parallelo all’asse x.

18
L’esperienza fisica mostra che le deformazioni cambiano segno fra l’intradosso e l’estradosso della trave. Si ha quindi sulla sezione un asse lungo il quale le deformazioni sono nulle (asse neutro). Indicando con y la distanza del generico punto dall’asse neutro (baricentrico), è naturale assumere che le deformazioni ezz siano: zz Anche per le tensioni, essendo lineari con le deformazioni avremo: Per determinare k basta considerare l’equilibrio:

19
da cui allora: che prende il nome di formula di Navier. Si noti che Mx è la coppia attiva nel piano di flessione (y,z). Ponendo il tensore degli sforzi e quello della deformazione sono:

20
Il luogo dei punti in cui si ha tensione è nulla dalla formula di Navier:
si ottiene quando y = 0 (sull’asse x) retta baricentrica. Viene detto asse neutro della flessione. Nel caso di un vettore momento non parallelo all’asse x (Figura) è possibile considerare le componenti Mx e My: x Mx Lo stato di tensione di determina con una sovrapposizione degli effetti di due flessioni semplici attorno ai due assi principali d’inerzia: My y
 retta baricentrica. Viene detto asse neutro della flessione. Nel caso di un vettore momento non parallelo all’asse x (Figura) è possibile considerare le componenti Mx e My: x. Mx. Lo stato di tensione di determina con una sovrapposizione degli effetti di due flessioni semplici attorno ai due assi principali d’inerzia: My. y.")
21
Il luogo dei punti in cui si ha tensione nulla è definito dalla equazione :
equazione di una retta baricentrica, detta asse neutro della flessione.

22
Consideriamo una flessione attorno all’asse x e un tronco di trave lungo dz generico.
Mx Mx La rotazione relativa fra due sezioni rette poste a distanza dz, può essere espressa direttamente in termini di componenti del tensore delle deformazioni. Tenendo presente che le sezioni restano piane, ruotando intorno all’asse neutro x, dall’esame della figura seguente si vede facilmente che : dφx Dove –εz(1)dz è l’accorciamento del lembo superiore mentre εz(2)dz è l’allungameneto del lembo inferiore.
dz è l’accorciamento del lembo superiore mentre εz(2)dz è l’allungameneto del lembo inferiore.")
23
Per calcolare le tensioni massime e minime basta considerare nella formula di Navier la distanze dal bordo inferiore e superiore: in cui sono stati introdotti i moduli di resistenza relativi all’asse x : x I moduli di resistenza della sezione rettangolare di lati b e h sono uguali a parte il segno a: x y

25
Nel caso della flessione le sezioni rette della trave restano piane, compiendo una semplice rotazione intorno all’asse x. Di conseguenza si può introdurre la caratteristica di deformazione flessionale , definendola come la rotazione relativa tra due sezioni poste a distanza unitaria, ossia, se si indica con φx la rotazione della generica sezione, si può porre : Dove, per coerenza con la convenzione sui segni già adottata per Mx, si assumerà quando porta y su z. Tenendo presente che la componente εz risulta [Mxy/(EJx)], pertanto la caratteristica della deformazione flessionale è data da :
], pertanto la caratteristica della deformazione flessionale è data da :")
26
Equazione della linea elastica
Nel caso delle travi inflesse è molto utilizzata, per la sua semplicità, l’equazione differenziale della linea elastica. Tale ricerca si basa sulla relazione momento flettente - curvatura: = - dove 1/r è la curvatura della linea elastica, EJ è la rigidezza flessionale della trave. Se la linea elastica è rappresentata dalla funzione: v = v(z), v = v(z)
, v = v(z)")
27
nell’ipotesi che le rotazioni della sezione trasversali siano piccole rispetto all’unità si ha che:
Quindi: EJ + M = 0 . Si nota che, con le usuali convenzioni sui segni, la curvatura (1/R) ed il momento flettente M hanno sempre segno opposto: M < 0 M > 0 > 0 < 0
 ed il momento flettente M hanno sempre segno opposto: M < 0. M > 0. > 0. < 0.")
28
L'integrazione dell’equazione differenziale presuppone la conoscenza di M e delle condizioni al contorno che possono riguardare v e v' . Si tratta cioè di condizioni geometriche. v = v = v = 0, v’= 0. v’ = v = 0.

29
Forza normale eccentrica
Quando le azioni applicate sulla base della trave di Saint-Venant sono equivalenti staticamente ad una forza , parallela all’asse z, passante per un punto X, denominato centro di sollecitazione, distinto dal baricentro G, la trave si dice soggetta a sforzo normale eccentrico. Considerando quindi la generica sezione in cui X indica il punto di applicazione della forza N (supposta di trazione e quindi positiva), nella sezione generica della trave, avremo una forza normale ed un momento flettente dati da : in cui e è l’eccentricità ovvero la distanza di X dal baricentro G:
, nella sezione generica della trave, avremo una forza normale ed un momento flettente dati da : in cui e è l’eccentricità ovvero la distanza di X dal baricentro G:")
30
e My x Mx ex ey y Il principio di sovrapposizione degli effetti ci consente di esprimere le tensioni come somma di 2 contributi: il primo dovuto all’azione assiale N ed il secondo dovuto alla flessione. Ricordando le relazioni scritte si ha:

31
l’equazione dell'asse neutro della sollecitazione composta si ottiene ponendo σzz = 0. In particolare si vede che tale asse non è baricentrico.

32
Lo stato di tensione si determina quindi con la relazione: P e h
Sezione rettangolare Nel caso di trave a sezione rettangolare con centro di sollecitazione X appartenente ad una mediana, gli assi principali di inerzia sono x e y e siano b, h le dimensioni della sezione. Inoltre N sia di compressione (pilastro). P Una forza P a distanza e dal baricentro è staticamente equivalente ad una forza P baricentrica ed a un momento Mx = Pe. Lo stato di tensione si determina quindi con la relazione: P e h x y b h
. P. Una forza P a distanza e dal baricentro è staticamente equivalente ad una forza P baricentrica ed a un momento Mx = Pe. Lo stato di tensione si determina quindi con la relazione: P. e. h. x. y. b. h.")
33
Quindi i valori estremi delle σzz sono:
P Somma di una parte costante ed una lineare. Volendo calcolare le tensioni massime e minime, si osserva che i moduli di resistenza risultano: ─ + ─ Quindi i valori estremi delle σzz sono: Se (6e/h) ≤ 1, la sezione risulta tutta compressa e l’asse neutro non taglia la sezione. Viceversa, se (6e/h) ≥ 1 la sezione è parte tesa e compressa e l’asse neutro taglia la sezione.
 ≤ 1, la sezione risulta tutta compressa e l’asse neutro non taglia la sezione. Viceversa, se (6e/h) ≥ 1 la sezione è parte tesa e compressa e l’asse neutro taglia la sezione.")
34
Se R è la risultante delle tensioni di compressione si ha: a
In questa seconda situazione è interessante il caso di solidi non reagenti a trazione per i quali si pone il problema di valutare la profondità “a” della zona compressa e la massima tensione σmax. R ─ σmax Se R è la risultante delle tensioni di compressione si ha: a Per l’equilibrio alla traslazione deve essere: Per l’equilibrio alla rotazione R e P devono avere la stessa retta di azione (stessa distanza dalla superficie esterna):
:")
35
Dall’ultima relazione si può ricavare l’incognita a:
Dall’equilibrio alla traslazione si può ricavare la massima tensione: Con le quale è possibile eseguire verifiche di resistenza. Si può osservare che al crescere di e aumenta la smax che tende a infinito quando e→(h/2).
.")
36
Torsione Nel caso della torsione, le azioni sulla base si riducono a : per cui l’unica caratteristica di sollecitazione diversa da zero, in ogni sezione della trave è un momento torcente costante.

37
Sezione circolare Vediamo di studiare la torsione nel caso di sezione circolare, che è uno dei più semplici poiché presenta la maggiore simmetria possibile. Con riferimento alla sezione circolare piena di raggio R soggetta ad un momento torcente Mz, si osserva che la generica sezione ruota attorno al baricentro di un angolo θ proporzionale alla distanza z dalla base fissa: θ =βz. R G x r P θ P’ y β rappresenta la rotazione relativa fra due sezioni a distanza unitaria (z=1). Un generico punto P, che si muove in P’ e distante r dal centro G, descrive così un arco di circonferenza di lunghezza ds. Se θ è l’angolo sotteso all’arco PP’ si ha: ds = r θ .
. Un generico punto P, che si muove in P’ e distante r dal centro G, descrive così un arco di circonferenza di lunghezza ds. Se θ è l’angolo sotteso all’arco PP’ si ha: ds = r θ .")
38
Se il punto P ha coordinate x e y si ha: y
Se la rotazione è infinitesima, l’arco ds può essere approssimato dalla tangente all’arco PP’ in P e le componenti di spostamento in direzione x ed y risultano: x x G Dove α è l’angolo fra il segmento GP e l’asse x. Sapendo che ds = r θ, si ha: α y r P P” Se il punto P ha coordinate x e y si ha: y

39
Quindi: Tenendo conto che θ =βz si può scrivere: Riguardo allo stato di deformazione, le componenti della matrice E sono:

40
Le tensioni si deducono immediatamente dalle equazioni costitutive:
Per determinare β è necessario imporre l’equilibrio fra le tensioni ed il momento torcente applicato. Se dA è una porzione infinitesima di area della sezione trasversale A su cui si hanno le tensioni tangenziali txz e tyz , il contributo al momento attorno all’asse z risulta: x txz dA tyz y

41
Come sempre, txz dA e tyz dA rappresentano le forze elementari che vanno moltiplicate per i rispettivi bracci y ed x per ottenere i momenti. Per l’intera sezione occorre sommare: Il modulo di elasticità G e l’angolo di torsione per unità di lunghezza β sono costanti nell’integrazione quindi: Avendo indicato con J0 il momento d’inerzia polare rispetto al baricentro. Si ricava così l’angolo di torsione per unità di lunghezza:

42
L’andamento delle tensioni lungo un diametro qualunque, è rappresentato in figura.
Lungo l’asse x (y=0) si hanno solo tensioni tangenziali tyz , date dalla: x Lungo l’asse y (x=0) si hanno solo tensioni tangenziali txz che risultano: y Lungo un generico raggio la tensione tangenziale risultante è:
 si hanno solo tensioni tangenziali tyz , date dalla: x. Lungo l’asse y (x=0) si hanno solo tensioni tangenziali txz che risultano: y. Lungo un generico raggio la tensione tangenziale risultante è:")
43
Ricordando che per la sezione circolare di raggio R è :
la tensione tangenziale massima risulta: Nel baricentro G lo stato di tensione è nullo. Per una generica sezione a distanza z dalla base fissa, la rotazione risulta:

44
Sezione rettangolare Si consideri una sezione rettangolare di lati h e b con h ≥ b. Il problema torsione è assai più complesso causa ingobbamento delle sezioni che non rimangono piane se soggette a momento torcente Mz. Il problema non ammette soluzione in forma chiusa, ma è possibile tuttavia determinarla mediante uno sviluppo in serie di Fourier. x Mz y Si utilizzano così relazioni approssimate per valutare la tensione tangenziale massima.

45
Una relazione approssimata applicabile è:
Andamento qualitativo delle txz lungo il lato Una relazione approssimata applicabile è: tyz Andamento qualitativo delle tyz lungo il lato Dove il coefficiente a dipende dal rapporto fra i lati. txz h/b 1.0 1.2 1.5 2.0 3.0 10.0 a 0.208 0.219 0.231 0.246 0.263 0.312 1/3 Si può vedere che a partire da un certo punto in poi il valore di a tende al valore di 1/3. Per quelle sezioni per cui è h/b > 10 si può assumere

46
Sezioni aperte in parete sottile composte con più rettangoli
Molte sezioni usate nelle costruzioni hanno una forma ottenuta mediante composizione di rettangoli. Sono un classico esempio di ciò le seguenti sezioni: Conoscendo quale parte di momento torcente compete al rettangolo in cui si può pensare scissa la sezione, si possono applicare ad esso i risultati ottenuti per ogni rettangolo allungato.

47
In generale non si conosce
In generale non si conosce . Come è noto, per una sezione rettangolare allungata: Questa relazione può essere scritta anche: da cui si deduce che il momento di inerzia per le sezioni rettangolari allungate è semplicemente :

48
Se Mzi è la quota di momento che compete al rettangolo i-esimo, per l’equilibrio dovrà risultare :
per individuare la quota di momento che compete al rettangolo i-esimo di lati ai e bi (con ai >> bi) si può pensare che possa dipendere dal suo momento d’inerzia Jti: Per l’intera sezione, il momento di inerzia ridotto è dato dalla somma dei momenti di inerzia ridotti delle singole parti componenti la sezione. quindi:
 si può pensare che possa dipendere dal suo momento d’inerzia Jti: Per l’intera sezione, il momento di inerzia ridotto è dato dalla somma dei momenti di inerzia ridotti delle singole parti componenti la sezione. quindi:")
49
Con riferimento alla figura sotto
b1 1 a1 2 a3 a2 3 b3 b2 Si può pensare di suddividerla in 3 parti (1, 2, 3).
.")
50
è allora possibile calcolare la tensione tangenziale massima relativa ad ogni rettangolo e la tensione tangenziale massima assoluta:

51
La teoria di Bredt per sezioni chiuse in parete sottile
La teoria di Bredt ha il suo fondamento nelle sole equazioni di equilibrio e si applica a sezione cavi di piccolo spessore soggette a momento torcente.

52
Le ipotesi sulle tensioni tangenziali nella sezione sono:
Nelle travi con sezione tubolare, soggette ad un momento torcente, si generano tensioni tangenziali all’interno del tubo, come è mostrato in Figura. x Considerando la linea media, equidistante dai bordi esterno ed interno (linea C) si fanno alcune ipotesi sulle tensioni. Se A è un generico punto della linea C si considera il vettore tangente t alla linea stessa. Le ipotesi sulle tensioni tangenziali nella sezione sono: → y
 si fanno alcune ipotesi sulle tensioni. Se A è un generico punto della linea C si considera il vettore tangente t alla linea stessa. Le ipotesi sulle tensioni tangenziali nella sezione sono: → y.")
53
Sezioniamo un tratto della parete del tubo di lunghezza dz.
Le tensioni tangenziali nello spessore attraverso lo spessore sA sono costanti e parallele al vettore tangente t. → t A t → Sezioniamo un tratto della parete del tubo di lunghezza dz. Alle tensioni tangenziali nella sezione all’interno del tubo, per l’equilibrio locale alla rotazione, si associano tensioni tangenziali anche sulle superfici parallele all’asse come mostrato in Figura. C

54
per l’equilibrio delle forze dovute alle tensioni dell’elemento ABCD lungo z si ha:
si deduce quindi che: tB Quindi per l’arbitrarietà con cui si sono scelti gli spessori sA e sB si può scrivere: C sB z B D tA sA A dz

55
dove aumenta lo spessore s, si avrà una riduzione della tensione tangenziale e viceversa.
Possiamo considerare l’equilibrio fra momento torcente e le tensioni tangenziali nella sezione all’interno del tubo. Considerando un tratto della linea media di lunghezza dC; la risultante delle tensioni agenti su questo tratto è una forza dF = τ s dC, tangente al bordo ed applicata lungo la linea media (tratteggiata in Figura) tra il bordo interno e quello esterno della parete. b assumendo un polo O arbitrario, l’equilibrio fra momento torcente e le tensioni tangenziali si può scrivere: dC t s dC
 tra il bordo interno e quello esterno della parete. b. assumendo un polo O arbitrario, l’equilibrio fra momento torcente e le tensioni tangenziali si può scrivere: dC. t s dC.")
56
essendo W l’area racchiusa dalla linea media C
essendo W l’area racchiusa dalla linea media C. Si ottiene così la formula di Bredt (1896): Generalmente lo spessore s è costante a tratti e quindi la massima andrà ricercata in corrispondenza di smin. Per una sezione chiusa, si considera sottile una parete quando il quadrato del suo spessore massimo s, sia molto minore dell’area che racchiude:
: Generalmente lo spessore s è costante a tratti e quindi la massima andrà ricercata in corrispondenza di smin. Per una sezione chiusa, si considera sottile una parete quando il quadrato del suo spessore massimo s, sia molto minore dell’area che racchiude:")
57
Flessione Composta In tale caso, sono applicate le seguenti condizioni sulle basi: Si ha presenza di momento flettente e di taglio e perciò questo quarto caso di sollecitazione prende il nome di flessione composta. La ricerca delle tensioni tangenziali condotta, in via rigorosa, attraverso la soluzione del problema, presenta difficoltà, anche per sezioni di forma semplice. Fortunatamente si dispone di una trattazione semplice, approssimata, dovuta a D.J.Jourawski e perciò nota anche col nome di teoria di Jourawski, che rappresenta la strada normalmente utilizzata nelle applicazioni per la determinazione delle tensioni tangenziali.

58
Consideriamo anche una corda che la divida in due parti A1 e A2.
Consideriamo due generiche sezioni della trave di Saint-Venant distanti dz. A2 A1 dz Sezione trasversale Consideriamo anche una corda che la divida in due parti A1 e A2. esprimiamo l’equilibrio alla traslazione lungo z del concio elementare di trave delimitato dai piani z e z + dz dall’elemento piano b dz dove b è la corda sulla sezione trasversale.

59
Si dovranno considerare le azioni dirette secondo l’asse z che si esplicano sul concio elementare attraverso le superfici che lo delimitano e cioè le superfici verticali e quella staccata dalla corda b che supponiamo ortogonale a y:

60
Se consideriamo le tyz costanti sull’area b dz, e valida la formula di Navier per la flessione anche nel caso di momento variabile si può scrivere: Essendo: si può scrivere: l’equilibrio alla traslazione lungo z del concio elementare risulta:

61
Dividendo primo e terzo membro per b dz e ricordando che il taglio è la derivata del momento si ottiene: che è la formula di Jourawski. Il metodo per giungere alla formula di Jourawski è del tutto indipendente dalla particolare corda prescelta, fermo restando che essa deve essere tale da dividere in due parti la sezione della trave. Essa può perciò essere costituita da più parti indipendenti ed avere forma poligonale o curvilinea. La particolare forma della sezione potrà richiedere il ricorso a qualunque di queste corde. Ad es. nel caso di sezioni a connessione multipla può risultare necessario tagliare la sezione in più punti per dividerla in due parti.

62
Occorre accertarsi che le tangenti al contorno alle estremità della corda siano ortogonali alla corda stessa. Altrimenti risulta necessaria una correzione per rendere tangente la tensione risultante. Sezioni simmetriche Supponiamo che il taglio T agisca secondo un asse di simmetria della sezione che perciò darà luogo ad una sollecitazione di taglio retto. Considerando corde parallele all’asse neutro x, le tensioni tangenziali possono essere calcolate con la relazione:

63
Sulla tensione tangenziale si può osservare che:
1) è nulla ai lembi della sezione; 2) il prodotto (t b) è massimo in corrispondenza della corda baricentrica. La larghezza b può presentare degli andamenti del tutto arbitrari, come ad esempio nella sezione di figura dove si vede chiaramente che il valore massimo della non è raggiunto sulla corda baricentrica che è sede invece di un massimo relativo.
 è nulla ai lembi della sezione; 2) il prodotto (t b) è massimo in corrispondenza della corda baricentrica. La larghezza b può presentare degli andamenti del tutto arbitrari, come ad esempio nella sezione di figura dove si vede chiaramente che il valore massimo della non è raggiunto sulla corda baricentrica che è sede invece di un massimo relativo.")
64
Per le sezioni simmetriche sollecitate da taglio, è anche possibile, con sole considerazioni di equilibrio, determinare, sui punti delle corde b parallele all’asse neutro x le tensioni tangenziali parallele all’asse x (Figure).
.")
65
Sezione rettangolare t = 0 Andamentoparabolico d H H/2 y Asse Neutro

66
Sezione a doppio T

67
Sezione a C La sezione a C sia sollecitata da un taglio T diretto secondo l’asse principale di inerzia . L’altro asse principale di inerzia è anche asse di simmetria per la sezione.

68
Tensioni tangenziali Ala superiore . Sulla generica corda la t vale: Essa varia quindi linearmente con l’ascissa e raggiunge il massimo per s1=h1. Anima. Sulla generica corda b la t ha la seguente espressione: in cui s è l’ascissa, lungo la linea media, misurata a partire da B. La varia con legge parabolica e raggiunge il suo massimo sulla corda baricentrica.

69
Centro di taglio Calcoliamo la risultante delle tensioni tangenziali lungo le ali e lungo l’anima V. Per le ali risulta: dove il segno + si riferisce all’ala superiore ed il segno – all’ala inferiore. Per l’anima: Le tre risultanti, così calcolate, hanno come rette d’azione le AB, BC, CD. Esse sono equivalenti ad una forza avente come retta d’azione la BC e ad una coppia positiva (antioraria)
 .")
70
In conclusione la distribuzione delle t risulta equivalente ad una azione di taglio che abbia come retta d’azione la retta parallela alla retta baricentrica che incontra l’asse di simmetria nel punto CT individuato da:

71
LA TEORIA TECNICA DELLE TRAVI
Sono molteplici le ipotesi del modello di Saint-Venant, in vero molto sofisticato, che nelle travi reali non trovano alcun riscontro. Le principali sono : le azioni sono applicate sulla superficie laterale delle travi e non sulle basi; le travi non sempre sono a sezione costante; l’asse della trave non sempre è rettilineo. Tuttavia i risultati conseguiti con il modello di Saint-Venant sono anche utilizzabili nello studio delle travi reali, con alcuni accorgimenti suggeriti dal postulato enunciato dallo stesso Saint-Venant. Il postulato infatti, svincola i risultati del problema di Saint-Venant dalla particolare condizione di carico in quanto, escludendo le zone direttamente influenzate dalle modalità di applicazione dei carichi, fa dipendere la soluzione unicamente dalla risultante e dal momento risultante, ossia dalle caratteristiche della sollecitazione N, , , , , Mz .

72
Consideriamo ora una trave prismatica, ad asse rettilineo, sulla quale siano applicate forze concentrate in equilibrio. Con riferimento al tratto di trave compreso tra due carichi successive, ad es. F1, F2, è evidente che tale tratto può essere assimilato alla trave di Saint-Venant, avendo però l’accortezza di escludere quelle zone direttamente sotto i carichi che inevitabilmente risentono della loro presenza. Possiamo pertanto studiare tale tratto di trave come se fosse la trave esaminata con carichi sulle basi definiti dalle caratteristiche della sollecitazione presenti.

73
Nella pratica si estendono i risultati a tutta la trave, anche cioè per le zone tratteggiate che sono direttamente interessate dai carichi. Il modello di Saint-Venant può essere altresì esteso anche alle travi con debole curvatura dell’asse, a travi a sezione variabile, ad esclusione però delle zone contigue alle variazioni discontinue ed a travi con carico distribuito sulla sua superficie. Nello studio delle travi reali, si ritiene che lo stato di tensione e di deformazione in una sezione qualunque sono gli stessi di quelli della trave di Saint-Venant avente la stessa sezione e le stesse caratteristiche di sollecitazione.

Presentazioni simili





 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")







 Definizione e proprietà>")



>")
 Cenni di teoria dell’elasticità, sforzi e deformazioni, l’equazione delle onde elastiche.>")

