Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
insieme di parti che interagiscono tra di loro
Teoria dei Sistemi Sistema: insieme di parti che interagiscono tra di loro l’interdipendenza delle parti componenti che interagiscono esprime una realtà diversa da quella delle singole componenti.

2
Analisi dei sistemi Supponiamo di dover descrivere un sistema costruito da N elementi, avremo N(N-1) possibili relazioni tra di essi. Ogni relazione può essere presente o assente determinando così una ulteriore diversificazione delle possibili configurazioni che in definitiva risultano pari a 2N(N-1).
.")
3
Collegamento delle parti di un sistema
Problema: collegamento completo tra N unità richiede N´(N-1)/2 collegamenti Esempi: 4 Unità => 6 Collegamenti, 10 Unità => 45 Collegamenti, 20 Unità => 190 Collegamenti C A B D
/2 collegamenti. Esempi: 4 Unità => 6 Collegamenti, 10 Unità => 45 Collegamenti, 20 Unità => 190 Collegamenti. C. A. B. D.")
4
Analisi dei sistemi È chiaro dunque che, non appena il numero degli elementi componenti supera le poche unità, risulta assai difficile, se non impossibile, tener conto di tutte le possibili configurazioni (stati) ottenibili nel sistema. L’analisi di un sistema a molti componenti va eseguita tenendo conto delle interrelazioni fra questi, ma utilizzando opportuni modelli esemplificativi che riducono le numerose e complicate relazioni esistenti fra i componenti, in forme più analitiche più semplici.
 ottenibili nel sistema. L’analisi di un sistema a molti componenti va eseguita tenendo conto delle interrelazioni fra questi, ma utilizzando opportuni modelli esemplificativi che riducono le numerose e complicate relazioni esistenti fra i componenti, in forme più analitiche più semplici.")
5
Analisi dei sistemi Un approccio di analisi dei sistemi, soddisfacentemente utilizzato nelle applicazioni pratiche, è il metodo detto ingresso-uscita

6
Il metodo ingresso-uscita
In tale approccio ci si limita a considerare il sistema come una “scatola nera” (black box) ignorando cioè tutte le parti interne che lo compongono e studiando tutte le modifiche che subisce uno certa variabile di uscita del sistema, in seguito alle variazioni di un’altra variabile posta al suo ingresso. In questo modo si tiene conto implicitamente delle interazioni esistenti tra le parti componenti la “scatola nera” mediante lo studio delle modifiche apportate alla variabile di ingresso dalla loro complessiva azione.
 ignorando cioè tutte le parti interne che lo compongono e studiando tutte le modifiche che subisce uno certa variabile di uscita del sistema, in seguito alle variazioni di un’altra variabile posta al suo ingresso. In questo modo si tiene conto implicitamente delle interazioni esistenti tra le parti componenti la scatola nera mediante lo studio delle modifiche apportate alla variabile di ingresso dalla loro complessiva azione.")
7
Definizione di sistema
Sistema: insieme di parti che interagiscono tra di loro

8
Esempi di sistemi Sistema di equazioni, Sistema di numerazione,
Sistema operativo di un calcolatore, Sistema di comunicazione e trasmissione (rete, postale, ecc.), Sistema nervoso, Sistema di regolazione della temperatura in un ambiente, Sistema monetario, Sistema di trasporti, ecc. Esempio: corpo umano
, Sistema nervoso, Sistema di regolazione della temperatura in un ambiente, Sistema monetario, Sistema di trasporti, ecc. Esempio: corpo umano.")
10
Esempio: sistema automobile

11
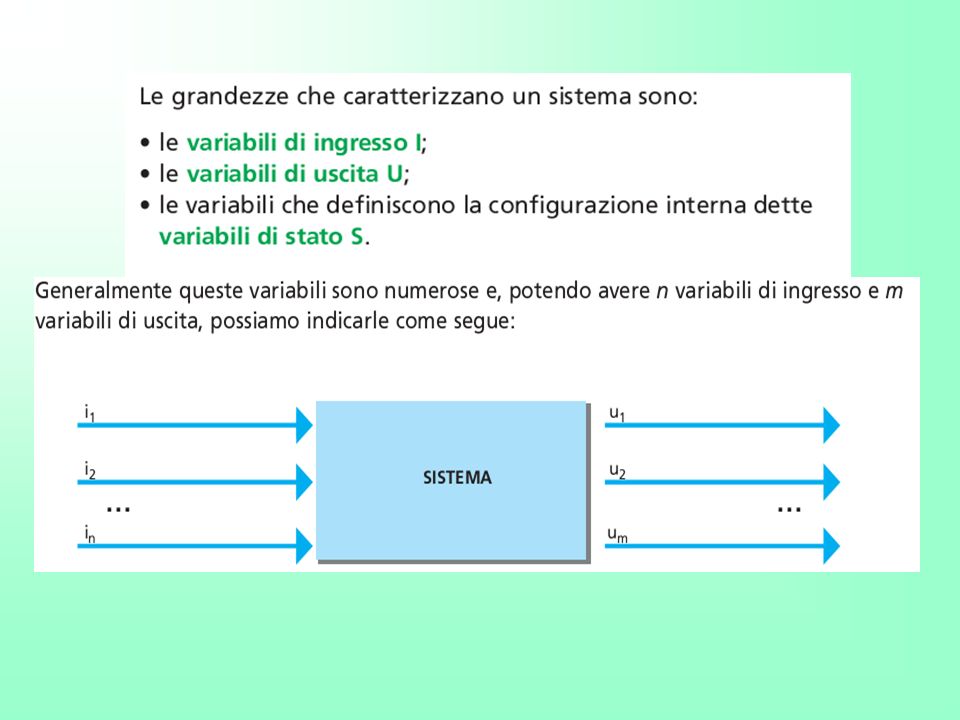
Variabili e parametri di un Sistema
Ogni sistema è caratterizzato da proprietà intrinseche o caratteristiche, che consentono di valutarne il comportamento. Una caratteristica viene detta permanente e viene descritta da una grandezza detta parametro, quando rappresenta una proprietà intrinseca del sistema ed è immutabile nel tempo. Una caratteristica si definisce condizionata e viene descritta attraverso una grandezza detta variabile, quando cambia nel tempo in relazione alle interazioni con il mondo esterno o con altri elementi del sistema. Esempio:

12
A questo occorre aggiungere i disturbi cioè azioni ricevute dal sistema che contrastano con il comportamento desiderato.

13
Classificazione dei sistemi
Si usa classificare i sistemi in base a natura e comportamento. Rispetto alla natura possiamo distinguere: · sistemi naturali: sono quelli che esistono in natura. Per esempio il sistema solare, un albero ecc. · sistemi artificiali: sono creati dall'uomo per soddisfare certe sue esigenze, oppure sono il frutto di collegamenti logici stabiliti dall'uomo tra fenomeni che apparentemente hanno una loro evoluzione autonoma; al primo tipo appartengono tutti gli oggetti, apparecchiature, macchine; al secondo invece appartengono intuizioni del tipo sistema economico, ecosistema, ecc. · sistemi misti: sono ottenuti combinando cose che già esistono in natura con altre organizzate ad hoc. Ad esempio, la serra in cui ci sono le piante che già esistono in natura, e i capannoni costruiti dall'uomo per creare particolari condizioni ambientali.

14
Rispetto al comportamento possiamo distinguere:
· sistemi aperti: sono quei sistemi che scambiano qualcosa con l'ambiente, dove con ambiente si intende tutto ciò che non fa parte del sistema; ad esempio un qualunque elettrodomestico che ha bisogno dell'energia elettrica per funzionare. · sistema chiuso: non scambia niente con l'ambiente. Potremmo definire un sistema chiuso un'autovettura, oppure una radiolina a batterie. In realtà la radiolina diffonde suono e l'automobile disperde gas di scarico; questo fa capire che di fatto non esistono sistemi chiusi da tutti i punti di vista. In ogni caso si può affermare che in un sistema chiuso l'intervento dell'ambiente esterno è secondario rispetto allo scopo per cui si studia il sistema.

15
Rispetto al comportamento possiamo distinguere:
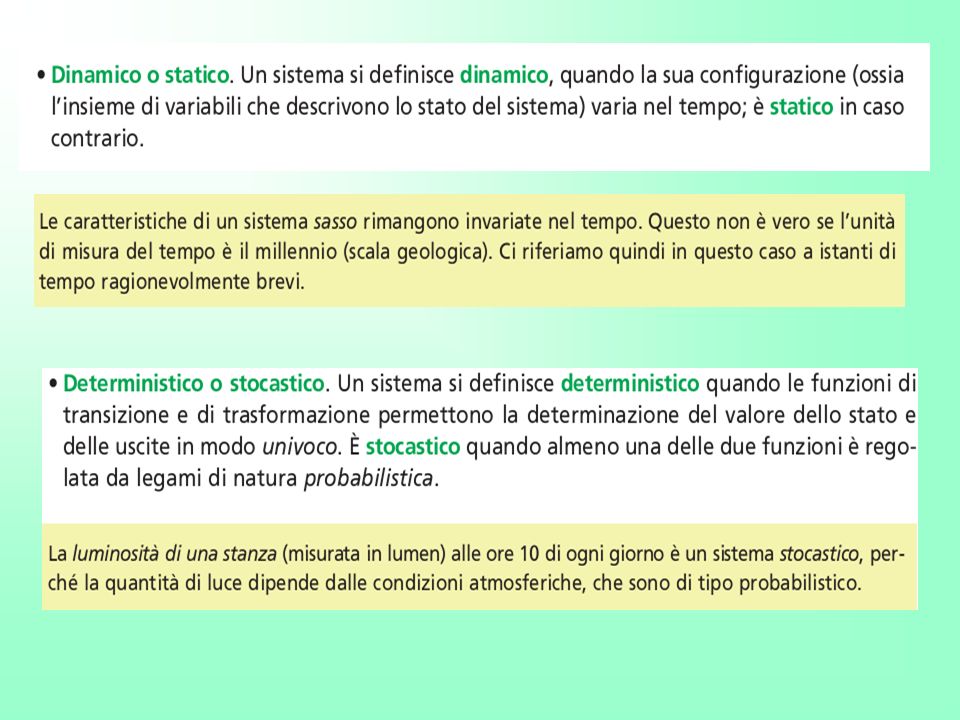
sistema deterministico: è quel sistema in cui è possibile determinare in modo univoco il valore delle variabili di uscita in funzione dei valori delle variabili in ingresso Per esempio, con riferimento al caso di una lampada, sappiamo tutti che posizionando l'interruttore su "on" si accende la lampadina. sistema stocastico o probabilistico: è quel sistema per il quale non è individuabile una corrispondenza univoca tra sollecitazione e comportamento, è necessaria una descrizione probabilistica del sistema. Esempio la roulette: al lancio della pallina corrisponde un risultato completamente casuale.

16
· sistema continuo: è un sistema incui lo stato in un certo istante di tempo è comunque diverso da quello nell'istante precedente, per quanto piccolo possa essere l'intervallo che separa questi due istanti. Un esempio di sistema continuo può essere un'autovettura che viaggia su una strada; se la condizione di questa macchina è definita dalla posizione occupata in un certo istante di tempo, possiamo dire che essa varia con continuità. - una variabile è continua quando, scelti due possibili valori diversi tra loro nel suo dominio di esistenza D, la variabile può assumere tutti gli infiniti valori compresi tra questi due estremi. - è discreta quando può assumere solo un numero finito di valori; · sistema discreto: è quello che può trovarsi solo in in numero finito di stati, ben diverse l'una dall'altra, che rimangono stabili per un certo intervallo di tempo, fino a quando non arriva un'altra sollecitazione. Un esempio di sistema discreto è la lampada la quale può trovarsi in una e solo una delle due condizioni consentite, accesa o spenta oppure un semaforo.

17
sistemi statici: sono quelli in cui l’insieme delle variabili che descrivono lo stato del sistema rimangono invariate nel tempo. Ad esempio i continenti costituiscono un sistema statico, su intervalli di tempo dell'ordine di grandezza della durata di una vita umana. Un sistema sasso rimane invariato nel tempo. Questo non è vero se la misura del tempo è un millennio (scala geologica). sistemi dinamici: sono quelli in cui l’insieme delle variabili che descrivono lo stato del sistema varia nel tempo. Anche queste due ultime classificazioni avvengono in modo soggettivo e dipendono dallo scopo dell’analisi. Ad esempio un dipinto ad un museo è considerato da un visitatore come un sistema statico, mentre per l’addetto al suo restauro è un sistema dinamico dato che il quadro evolve nel tempo attraverso processi di invecchiamento.
. sistemi dinamici: sono quelli in cui l’insieme delle variabili che descrivono lo stato del sistema varia nel tempo. Anche queste due ultime classificazioni avvengono in modo soggettivo e dipendono dallo scopo dell’analisi. Ad esempio un dipinto ad un museo è considerato da un visitatore come un sistema statico, mentre per l’addetto al suo restauro è un sistema dinamico dato che il quadro evolve nel tempo attraverso processi di invecchiamento.")
18
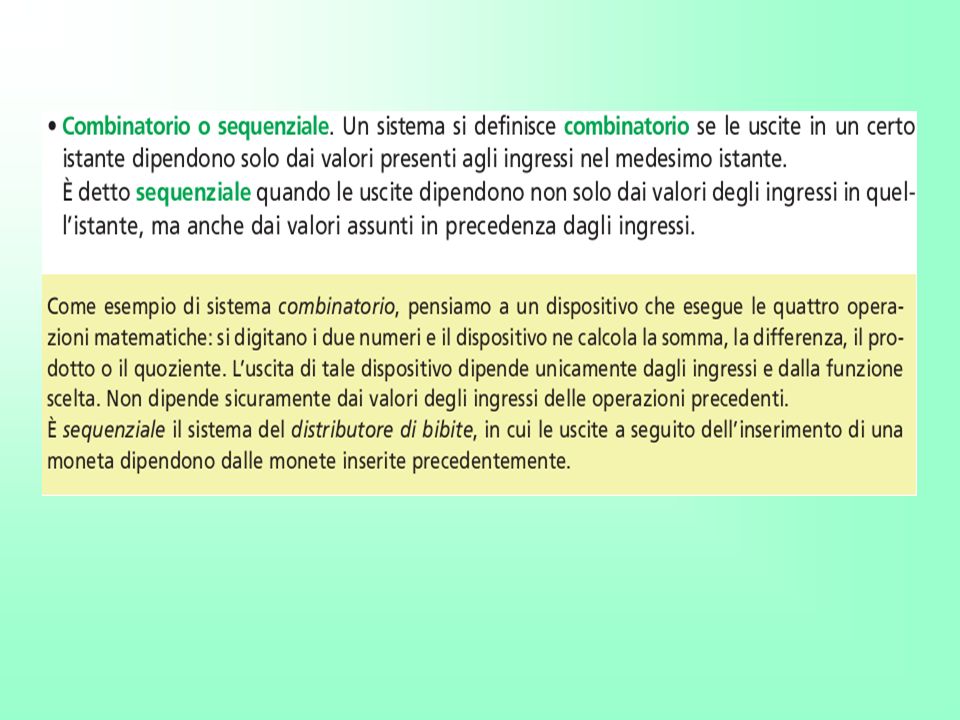
Sistema combinatorio: se in ogni istante le uscite sono determinate in modo univoco dalla configurazione assunta in quello stesso istante solo dalle variabili di ingresso. Esempio: una calcolatrice che calcola somma, prodotto,ecc. Il risultato dipende unicamente dai dati in ingresso e dalla funzione scelta. Sistema sequenziale: quando le uscite dipendono non solo dai valori degli ingressi in quell’istante, ma anche dai valori assunti in precedenza dagli ingressi Esempio: distributore di bibite in cui le uscite in seguito all’inserimento di una moneta dipendono dalle monete inserite precedentemente. Nei sistemi sequenziali poiché lo stato in un certo istante dipende dalla sua storia precedente si usa dire che i sistemi sequenziali sono dotati di memoria

19
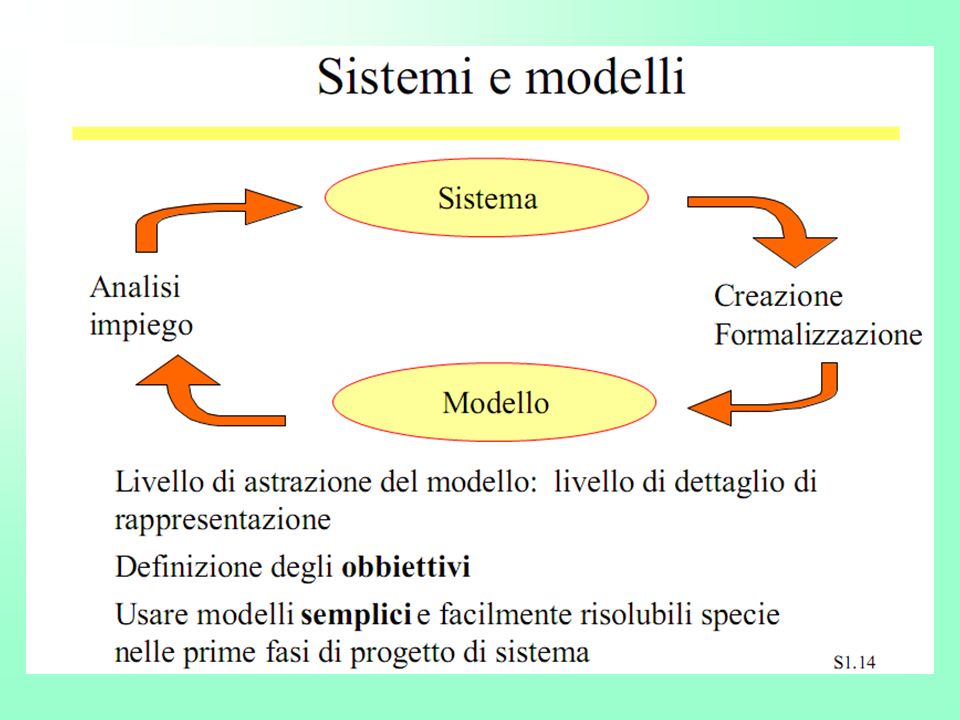
La rappresentazione dei sistemi: i modelli
Definizione di modello Studiare un sistema in modo diretto non sempre è possibile e magari non è opportuno. Conviene dunque servirsi di un modello. Modello è una astrazione, semplificazione, schematizzazione che mette in evidenza ciò che più interessa del sistema (riguardo all’obiettivo che ci si pone studiandolo) nel modo più opportuno eliminando ciò che non è influente. Possono essere modelli : immagini, oggetti fisici, schemi a blocchi di vario genere , tabelle, numeri , testi ecc. Quando si costruisce il modello, diventa fondamentale il problema di cosa includere in esso e cosa invece tralasciare. Questa linea di demarcazione ideale viene detta confine del sistema.
 nel modo più opportuno eliminando ciò che non è influente. Possono essere modelli : immagini, oggetti fisici, schemi a blocchi di vario genere , tabelle, numeri , testi ecc. Quando si costruisce il modello, diventa fondamentale il problema di cosa includere in esso e cosa invece tralasciare. Questa linea di demarcazione ideale viene detta confine del sistema.")
20
Classificazione dei modelli
In base all'uso i modelli si classificano in: · Modelli descrittivi o statici: sono quelli che si limitano a riprodurre con eventuali semplificazioni la realtà, senza presupporre l'uso che ne verrà fatto. Ad esempio un modello descrittivo di una lavatrice è la sua fotografia che la riproduce nel suo insieme. · Modelli predittivi: sono quei modelli che di una certa realtà danno gli elementi necessari per prevederne l'evoluzione, lasciando spazio ad eventuali scelte. Un modello predittivo è quello che descrive i possibili programmi di lavaggio. · Modelli prescrittivi: sono quei modelli che impongono un comportamento particolare in previsione dell'obbiettivo da raggiungere. Un modello prescrittivo è la sequenza di comandi che si devono dare se si vuole ottenere un particolare risultato.

21
Rispetto alla natura possiamo classificare i modelli in:
· Modelli simbolici o matematici: sono quelli che danno una rappresentazione astratta della realtà Consideriamo un’auto che corre sull’autostrada. La sua velocità dipende dallo spazio percorso nell’unità di tempo. (V=Spazio/Tempo oppure v=s/t) Se invece non chiarissimo queste relazioni, il modello prodotto non avrebbe alcun significato. Un modello simbolico di questo tipo prende il nome di modello matematico.
 Se invece non chiarissimo queste relazioni, il modello prodotto non avrebbe alcun significato. Un modello simbolico di questo tipo prende il nome di modello matematico.")
22
Possibili modelli simbolici: modelli matematici, modelli grafici , modelli informatici.
Qualsiasi modello è una qualche combinazione dei seguenti elementi: - componenti (sottosistemi) - parametri - variabili - relazioni funzionali - vincoli - criteri Frequente è l’uso contemporaneo di più modelli.
 - parametri. - variabili. - relazioni funzionali. - vincoli. - criteri. Frequente è l’uso contemporaneo di più modelli.")
23
Modelli analogici: sono quei modelli che danno una rappresentazione fedele della realtà. Pensiamo ad una autovettura di cui ci interessa studiare il coefficiente di penetrazione aerodinamica: un modello adatto a questo studio deve riprodurre almeno esternamente l'autovettura, pur non avendo magari il motore. Un particolare tipo di modello analogico è il modello in scala ridotta, che riproduce qualitativamente un certo sistema riducendone proporzionalmente la dimensione; pensiamo ad esempio ai modellini di autovetture, che si vedono esposti nelle vetrine dei negozi di giocattoli.

24
Esempi di modelli Un esempio di modello può essere considerato un disegno tecnico che riproduca un mobile, in modo tale da evidenziare la forma e le dimensioni dello stesso, ogni linea è associata ad un ben preciso profilo del mobile, i rapporti tra le lunghezze dei profili corrispondono ai rapporti tra le lunghezze delle rispettive linee sul disegno e le posizioni di ogni profilo rispetto ad un sistema di riferimento sono le stesse occupate dalle rispettive linee rispetto al foglio. Un altro esempio di modello può essere uno schema elettrico usato per descrivere i collegamenti esistenti tra gli elementi di un circuito, ogni simbolo grafico è associato convenzionalmente ad un elemento del circuito (componenti, connettori, cavi) e non esiste nessun rapporto tra le dimensioni degli elementi fisici ed i parametri geometrici del disegno. Quindi lo schema elettrico crea una corrispondenza univoca tra simboli del modello e gli elementi, evidenziandone la funzionalità dei componenti. In entrambi i casi quindi il modello mantiene le stesse caratteristiche funzionali del sistema rappresentato.
 e non esiste nessun rapporto tra le dimensioni degli elementi fisici ed i parametri geometrici del disegno. Quindi lo schema elettrico crea una corrispondenza univoca tra simboli del modello e gli elementi, evidenziandone la funzionalità dei componenti. In entrambi i casi quindi il modello mantiene le stesse caratteristiche funzionali del sistema rappresentato.")
25
Modello Black Box ingressi uscite Black Box
Il più semplice modello per rappresentare un sistema, consiste in un blocco rettangolare con delle frecce a destra e a sinistra di esso, chiamato black box. Il blocco rappresenta il sistema; le frecce in entrata quelli che si chiamano ingressi, cioè le sollecitazioni alle quali il sistema è sensibile; le frecce in uscita rappresentano quelle che si chiamano uscite, cioè le risposte alle sollecitazioni, ovvero le grandezze i cui valori sono condizionati dai particolari ingressi applicati. ingressi uscite Black Box

26
Se si fa un esperimento ideale con un problema qualsiasi, ci si rende subito conto che i fattori che possiamo considerare avere qualche effetto sul sistema sono moltissimi (se non infiniti!) Ci si accorge che è possibile risalire senza fine per le catene di cause e effetti, e trovare innumerevoli relazioni di questo tipo (in qualche modo, tutto ha una qualche influenza su tutto!). Qui nasce la necessità del modello che deve essere una semplificazione rappresentativa della realtà che vogliamo studiare. Si tratterà quindi di includere nel modello quelle variabili che hanno una maggiore influenza rispetto al problema che ci interessa, e lasciare da parte quelle che portano ad un aumento della complessità senza dare un grande contributo al comportamento del modello. Regola: rappresentare il massimo di complessità con un minimo di complicazione (variabii e parametri)
. Qui nasce la necessità del modello che deve essere una. semplificazione rappresentativa della realtà che vogliamo studiare. Si tratterà quindi di includere nel modello quelle variabili che hanno una maggiore influenza rispetto al problema che ci interessa, e lasciare da parte quelle che portano ad un aumento della complessità senza dare un grande contributo al comportamento del modello. Regola: rappresentare il massimo di complessità con un minimo di complicazione (variabii e parametri)")
27
Come si costruisce il modello di un sistema
1. Definizione del problema Si individua il problema reale da studiare Si stabilisce se esso è trattabile in termini di analisi di uno o più sistemi. Individuare le relazioni causali: - quali sono i legami causa-effetto tra le variabili di ingresso e le variabili in uscita - quali sono i legami causa-effetto interni al sistema - quali sono i parametri del sistema - quali sono i confini del sistema: cosa è necessario includervi e cosa può essere tralasciato.

28
Come si costruisce il modello di un sistema
2.. Concettualizzazione del sistema La seconda fase consiste in una stesura sommaria, su carta, delle relazioni principali che si sono individuate nel sistema. Alcuni modi di rappresentare su carta queste relazioni sono: I grafici dell'andamento nel tempo delle variabili di ingresso, di uscita, di stato interno e le loro relazioni matematiche e statistiche; I diagrammi di flusso (flow chart). 3. Rappresentazione del modello A questo punto, il modello viene tradotto in un linguaggio simbolico: disegno (CAD), formule matematiche, schemi, modelli in scala eventualmente con l’ausilio del computer.
. 3. Rappresentazione del modello. A questo punto, il modello viene tradotto in un linguaggio simbolico: disegno (CAD), formule matematiche, schemi, modelli in scala eventualmente con l’ausilio del computer.")
30
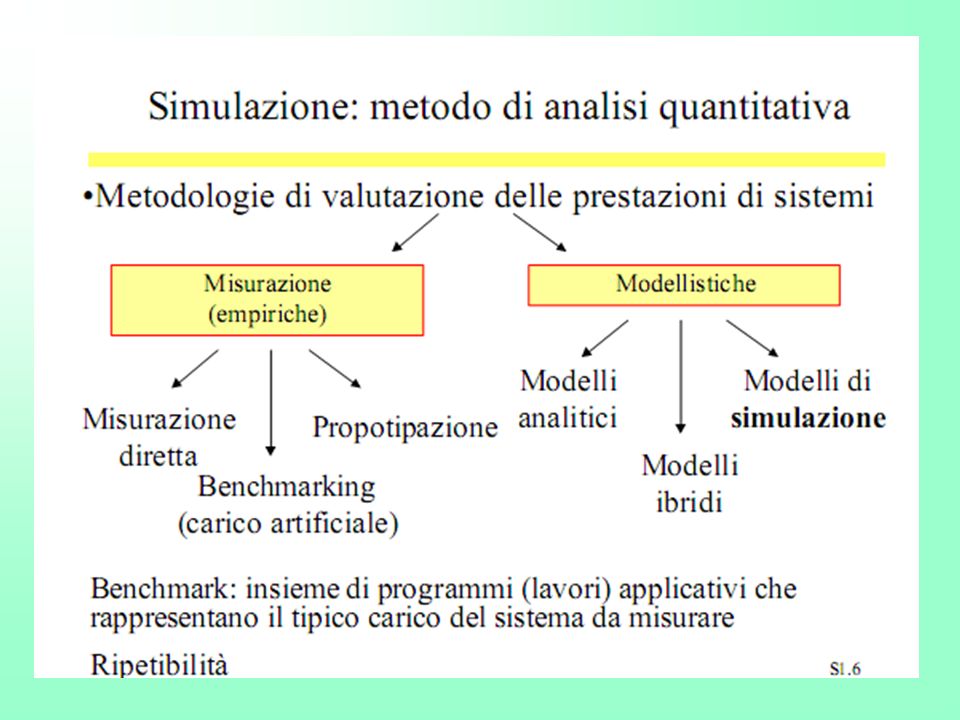
Simulazione: comportamento e valutazione del modello
Con il termine simulazione si intende l'attività del replicare per mezzo di opportuni modelli una realtà già esistente o da progettare, al fine di studiare, nel primo caso, gli effetti di possibili interventi o eventi in qualche modo prevedibili, o, nel secondo, di valutare diverse possibili scelte progettuali e la loro evoluzione nel tempo. E’ una metodologia sperimentale che si propone di : - descrivere il comportamento di un sistema - costruire teorie o ipotesi che tengano conto del comportamento osservato - usare tali teorie per determinare il comportamento futuro e cioè gli effetti prodotti da cambiamenti nel sistema o nel suo modo di operare.

31
Simulare un sistema si rende necessario quando:
- non esiste possibilità di sperimentazione diretta ( es. voli interplanetari) - non esistono metodi analitici adeguati (es. sistemi caotici) - se esistono metodi analitici questi sono troppo complessi (es.interagiscono molti parametri) - si vuole analizzare un processo molto lungo (tempi geologici) o molto breve ( es. interazione fra particelle subatomiche)
 - non esistono metodi analitici adeguati (es. sistemi caotici) - se esistono metodi analitici questi sono troppo complessi (es.interagiscono molti parametri) - si vuole analizzare un processo molto lungo (tempi geologici) o molto breve ( es. interazione fra particelle subatomiche)")
32
Un modello di simulazione può essere deterministico o stocastico, discreto o continuo.
Simulazione deterministica quando l'evoluzione nel tempo del modello costruito è univocamente determinata dalle sue caratteristiche e dalle condizioni iniziali. Simulazione stocastica quando nel modello sono presenti grandezze aleatorie che a seconda del valore che assumono possono portare a diversi comportamenti Simulazione continua si intende una simulazione in cui il valore delle variabili coinvolte varia in modo continuo nel tempo (anche se poi esse saranno in pratica valutate in istanti discreti). Simulazione discreta quando lo stato del sistema studiato, e quindi il valore delle variabili relative, cambia in ben definiti istanti di tempo.
. Simulazione discreta quando lo stato del sistema studiato, e quindi il valore delle variabili relative, cambia in ben definiti istanti di tempo.")
33
Una volta costruito il modello esso va tradotto in un programma su calcolatore.
E'possibile usare linguaggi di programmazione quali C, C++, Java, ecc. Una interessante alternativa è quella di ricorrere ad applicazioni di tipo interattivo per la simulazione ad es. simulatori di volo Tali applicazioni sono di facile uso e quindi molto adatte a costruire rapidamente modelli anche sofisticati. Per problemi di piccole dimensioni è anche possibile usare strumenti informatici di uso comune quali i fogli elettronici.

34
Introduzione alla Simulazione
• Definizione di simulazione – replica di un sistema o di un processo per mezzo di opportuni modelli di una realtà già esistente o da progettare e previsione della sua evoluzione nel tempo • Scopo della simulazione – Generazione di una storia artificiale del sistema – Studio e valutazione delle caratteristiche del sistema (analisi delle prestazioni) – Risposta alla domanda “cosa accade se…” – Progetto: analisi di sistemi reali o “ipotetici” – Confronto tra due o più sistemi – Ottimizzazione: determinare valore ottimale di parametri – Determinare i punti critici (bottlenecks) – Previsionale: predire le prestazioni del sistema nel futuro
 – Risposta alla domanda cosa accade se… – Progetto: analisi di sistemi reali o ipotetici – Confronto tra due o più sistemi. – Ottimizzazione: determinare valore ottimale di parametri. – Determinare i punti critici (bottlenecks) – Previsionale: predire le prestazioni del sistema nel futuro.")
35
Aree di applicazione • Sistemi di elaborazione • Sistemi di comunicazione • Sistemi di trasporto • Sistemi di produzione e automazione • Sistemi militari • Sistemi sociali • Sistemi naturali • Sistemi economici

39
Esempio: i computer sono automi che svolgono un determinato compito in
funzione del programma che si manda in esecuzione. Per mezzo della sua rappresentazione si analizza il suo comportamento logico-funzionale senza la necessità di una sua realizzazione fisica. L’utente inserisce i dati in ingresso e, senza interessarsi di cosa avviene al loro interno, vede i risultati dell’esecuzione in uscita. I processi avviati dalle variabili in input sono deterministici, univoci e previsti per qualunque caso in ingresso (definizione di algoritmo).
.")
40
Definizione di Automa L’Automa è caratterizzato da sei parametri:
T = insieme ordinato dei tempi I = insieme delle n variabili di ingresso U = insieme delle m variabili di uscita S = insieme delle variabili di stato f() è la funzione di transizione del sistema (valuta lo stato del sistema) g() è la funzione di trasformazione del sistema (calcola le uscite in base allo stato e alle variabili di ingresso)
 è la funzione di transizione del sistema (valuta lo stato del sistema) g() è la funzione di trasformazione del sistema (calcola le uscite in base allo stato e alle variabili di ingresso)")
41
Caratteristiche di un automa
Sono macchine che compiono attività complesse in cui sono riconoscibili elementi propri delle attività superiori del comportamento umano. Possono essere programmate per svolgere diverse mansioni e per modificare le proprie azioni in relazione ai mutamenti ambientali. (Es: lavatrici, sistemi di controlli ascensori, bancomat…computer) Un automa è un sistema : Dinamico Passa da uno stato all’altro secondo gli input che riceve Invariante Se le condizioni iniziali sono le stesse il comportamento del sistema è invariato Discreto Le variabili, d’ingresso, di stato e d’uscita possono assumere solo valori discreti
 Un automa è un sistema : Dinamico Passa da uno stato all’altro secondo gli input che riceve. Invariante Se le condizioni iniziali sono le stesse il comportamento. del sistema è invariato. Discreto Le variabili, d’ingresso, di stato e d’uscita possono. assumere solo valori discreti.")
45
Tabelle di Transizione

46
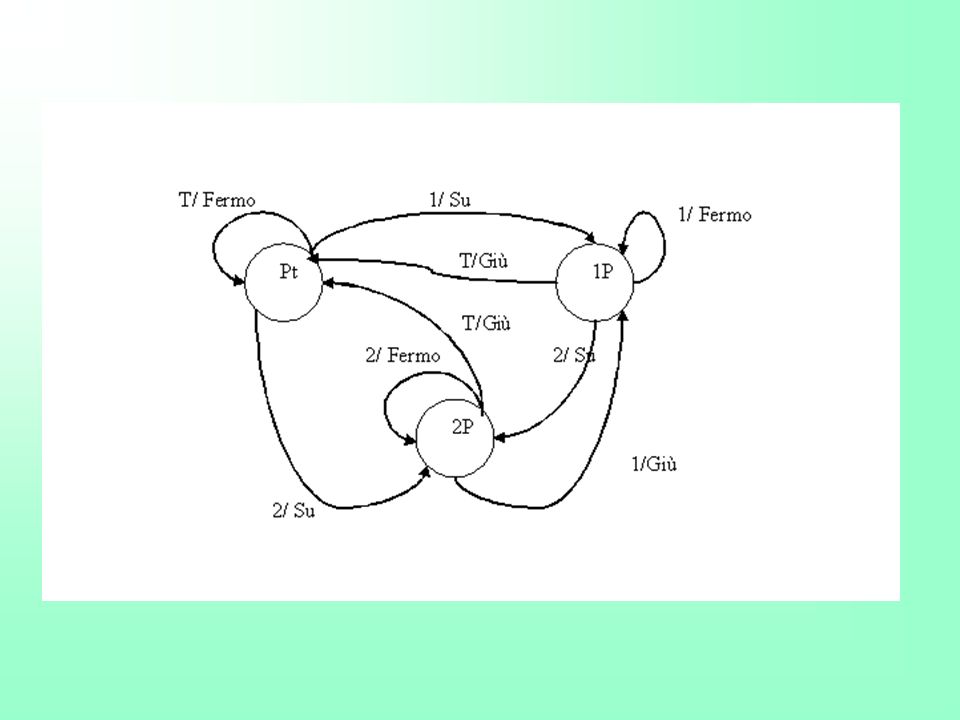
Esempio 1: Ascensore Proviamo, ora, a simulare il funzionamento di un ascensore. Un ascensore di un palazzo composto da due piani accetta la richiesta del piano di destinazione (terra, 1, 2) e restituisce lo spostamento desiderato (su, giù, fermo). Si tratta di un automa in cui: S = {Pt, 1P, 2P}, dove Pt= piano terra, 1P= primo piano e 2P= secondo piano; I = {T, 1, 2} sono le possibilità offerte dalla pulsantiera; U = {Su, Giù, Fermo} sono gli spostamenti dell’ascensore. Costruiamo la tabella di transizione:
 e restituisce lo spostamento desiderato. (su, giù, fermo). Si tratta di un automa in cui: S = {Pt, 1P, 2P}, dove Pt= piano terra, 1P= primo piano e 2P= secondo piano; I = {T, 1, 2} sono le possibilità offerte dalla pulsantiera; U = {Su, Giù, Fermo} sono gli spostamenti dell’ascensore. Costruiamo la tabella di transizione:")
47
Diagramma di transizione dell’ ascensore su due piani:

48
Un altro esempio è il diagramma di transizione di un interruttore che comanda l’accensione di una lampadina:

49
Un altro esempio è il diagramma di transizione dello sciacquone del bagno:

50
Esempio: Quali sono i valori assunti dal sistema?
In entrata le tre possibilità che abbiamo di fronte alla nostra macchina sono: o non chiediamo nessuna caramella alla macchina (nulla), o inseriamo 1 moneta, o chiediamo la restituzione (R). In uscita invece, avremo quattro possibilità: nulla, se non abbiamo inserito alcuna moneta; 1 moneta oppure 2 monete ( insufficienti per aver diritto a una caramella) la caramella, se le monete inserite sono tre.
, o inseriamo 1 moneta, o chiediamo la restituzione (R). In uscita invece, avremo quattro possibilità: nulla, se non abbiamo inserito alcuna moneta; 1 moneta oppure 2 monete ( insufficienti per aver diritto a una caramella) la caramella, se le monete inserite sono tre.")
51
Gli stati interni, cioè i diversi stati che la macchina attraverserà in attesa dell’evento finale, vanno da nessuna moneta a due, L’immissione della terza moneta ci darà l’output finale. Ma come fa il distributore a ricordare quante monete sono state inserite? Utilizza la sua memoria, costituita dagli stati interni. Per illustrare il funzionamento della nostra macchina distributrice, cioè come essa reagisce agli stimoli ricevuti dall’esterno, ci possiamo servire della matrice di transizione e del diagramma di transizione che descrivono l’evoluzione dinamica del sistema. La matrice T avrà tante righe quanti sono gli stati possibili e tante colonne quanti sono gli input. L’elemento Ti,j indica in quale nuovo stato ci troveremo e quale output sarà fornito se ci troviamo nello stato i-esimo e arriva lo j-esimo input. Nella macchina distributrice di caramelle sarà:

52
Diagramma di Transizione

53
Lo stato nessuna è lo stato di riposo, ovvero lo stato in cui si trova l’automa quando non ha ingressi. Anche gli stati uno e due potrebbero essere stati di riposo nel caso che qualcuno inserisca una, due monete, non prema restituzione e vada via. Nello stato nessuna l’arco A, infatti, indica che con ingresso 0 (nessun ingresso) si rimane nello stesso stato con uscita 0 (nessuna uscita). Anche gli archi C, E svolgono lo stesso ruolo. L’arco B indica che, inserendo una moneta (quindi ingresso 1), senza premere R (restituisci), si transita allo stato una, che simboleggia lo stato in cui si trova l’automa con una sola moneta inserita, dando in uscita 0 caramelle (nessuna caramella) e 0 monete restituite (nessuna moneta). Stesso comportamento per l’arco D. Nello stato due sono state inserite due monete. Da questo stato si transita allo stato nessuna, che diventa stato finale se si inserisce la terza moneta, arco F. l’uscita è una caramella. Gli archi G e H indicano la richiesta di restituzione di moneta.
 si rimane nello stesso stato con uscita 0 (nessuna uscita). Anche gli archi C, E svolgono lo stesso ruolo. L’arco B indica che, inserendo una moneta (quindi ingresso 1), senza premere R (restituisci), si transita allo stato una, che simboleggia lo stato in cui si trova l’automa con una sola moneta inserita, dando in uscita 0 caramelle (nessuna caramella) e 0 monete restituite (nessuna moneta). Stesso comportamento per l’arco D. Nello stato due sono state inserite due monete. Da questo stato si transita allo stato nessuna, che diventa stato finale se si inserisce la terza moneta, arco F. l’uscita è una caramella. Gli archi G e H indicano la richiesta di restituzione di moneta.")
54
LA MACCHINA DI TOURING Molti matematici si sono cimentati nella ricerca di macchine in grado di risolvere qualsiasi problema, o per lo meno tutti quelli risolvibili attraverso un algoritmo. Un passo decisivo in tal senso fu fatto nel 1936 da Alan Turing che, oltre a dare una definizione rigorosa di algoritmo, identificò le caratteristiche di un modello matematico di una macchina astratta in grado di eseguire un algoritmo. Tale macchina prese appunto il nome di macchina di Turing. La macchina di Turing rappresenta ancora oggi uno dei più potenti strumenti logico concettuali mai creati dall’uomo e rappresentò il punto di partenza per tutti gli studi successivi che portarono alla realizzazione dei potenti calcolatori. La macchina di Turing, riportata nella figura successiva, è essenzialmente costituita dai tre seguenti elementi: 1) un nastro infinito 2) una testina di lettura e scrittura 3) un organo di controllo
 un nastro infinito. 2) una testina di lettura e scrittura. 3) un organo di controllo.")
55
1) un nastro infinito 2) una testina di lettura e scrittura 3) un organo di controllo Il nastro, che può essere considerato l’organo di memorizzazione delle informazioni, è suddiviso in caselle, e può spostarsi a destra o a sinistra di una sola casella per volta

56
AUTOMI Un automa (o macchina) è un sistema in grado di eseguire processi. Durante il suo funzionamento, l’automa attraversa alcune configurazioni ben definite, denominate stati interni (o semplicemente stati), che consentono di individuare come la macchina si sta evolvendo. Tra tutti gli automi, quelli più semplici da analizzare e più frequenti sono quelli contraddistinti da un numero finito di ingressi, di stati e di uscite, denominati per questa proprietà automi a stati finiti.
 è un sistema in grado di eseguire processi. Durante il suo funzionamento, l’automa attraversa alcune configurazioni ben definite, denominate stati interni. (o semplicemente stati), che consentono di individuare come la macchina si sta evolvendo. Tra tutti gli automi, quelli più semplici da analizzare e più frequenti sono quelli contraddistinti da un numero finito di ingressi, di stati e di uscite, denominati per questa proprietà automi a stati finiti.")
57
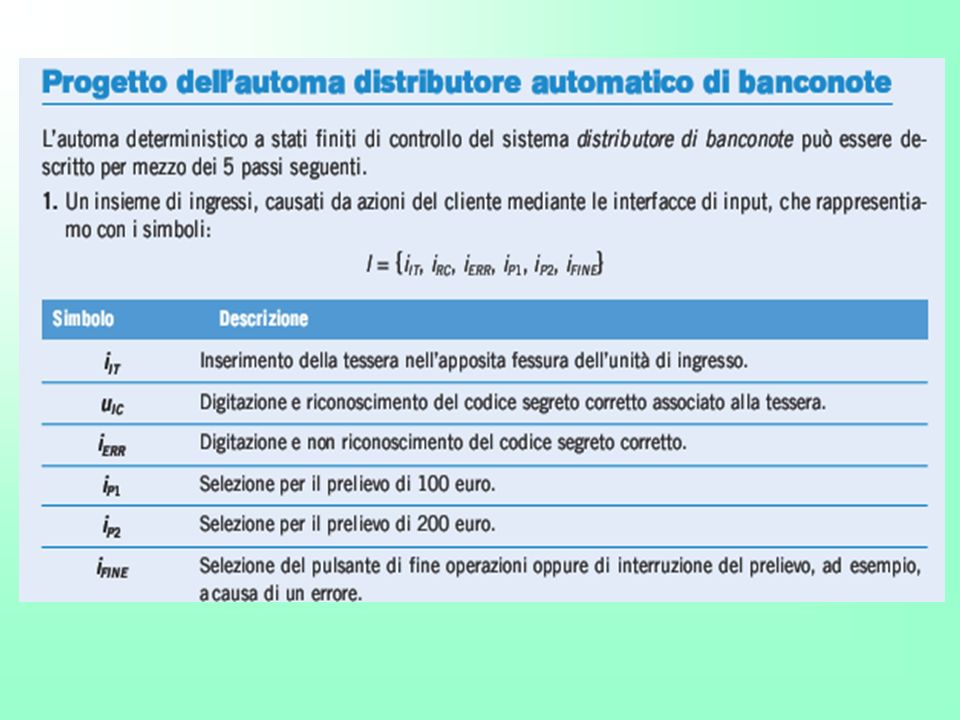
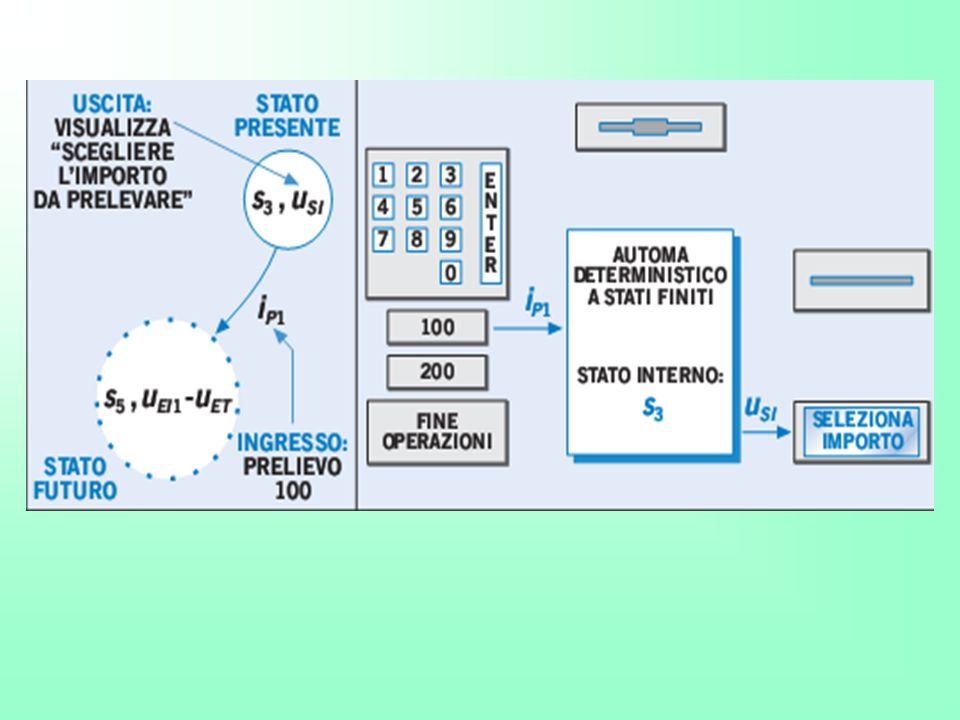
il distributore automatico di banconote
Un esempio di automa: il distributore automatico di banconote Per consentire i prelievi, il distributore automatico di banconote dispone di quattro gruppi di elementi:

58
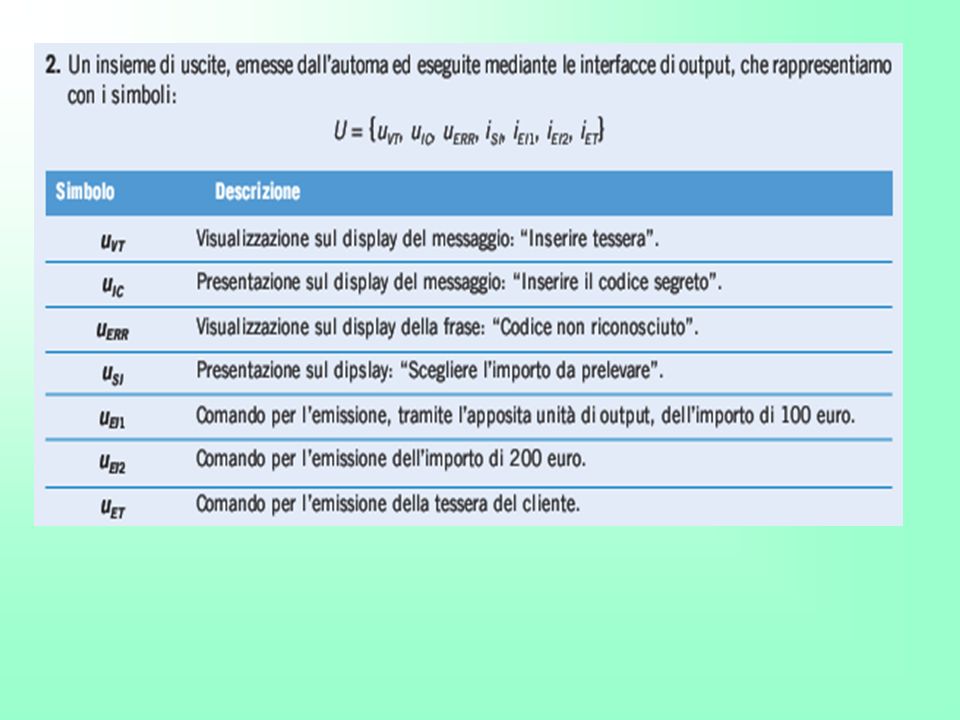
Le unità di ingresso sono costituite da: una tastiera, utilizzata per digitare un codice segreto, contraddistinto (sequenza di cifre numeriche); alcuni pulsanti per selezionare líimporto da prelevare; un pulsante di fine operazioni, che puÚ essere selezionato per interrompere le operazioni. Una unità di ingresso-uscita che costituita da: un modulo meccanico, per l’inserimento e la restituzione al cliente di una tessera magnetica personale di riconoscimento. Le unità di uscita sono formate da: un visualizzatore (display) dove sono presentate alcune informazioni per il cliente; una unit‡ meccanica per líemissione delle banconote. Una unitè di controllo che è rappresentata da un automa a stati finiti. L’automa deve essere in grado di: ricevere e accettare la tessera del cliente; riconoscere il codice segreto digitato; distribuire, sulla base della scelta, gruppi di banconote. Ad esempio se sono disponibili solo gli importi 100 e 200 euro, il sistema deve fornire, rispettivamente, una oppure due banconote da 100 euro.
 dove sono presentate alcune informazioni per il cliente; una unit‡ meccanica per líemissione delle banconote. Una unitè di controllo che è rappresentata da un automa a stati finiti. L’automa deve essere in grado di: ricevere e accettare la tessera del cliente; riconoscere il codice segreto digitato; distribuire, sulla base della scelta, gruppi di banconote. Ad esempio se sono disponibili solo gli importi 100 e 200 euro, il sistema deve fornire, rispettivamente, una oppure due banconote da 100 euro.")
59
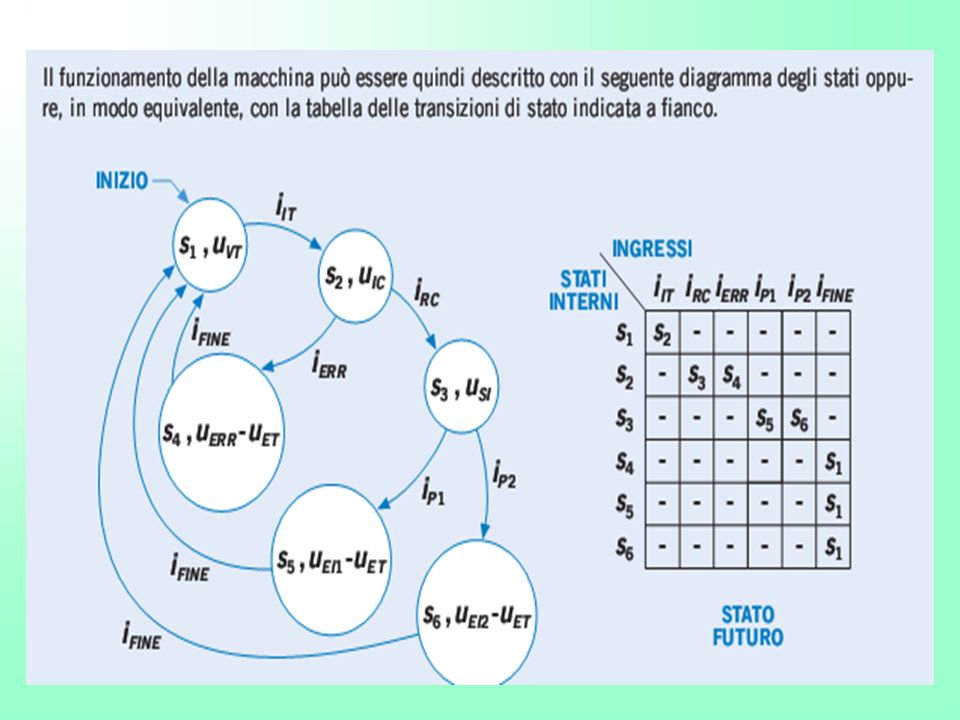
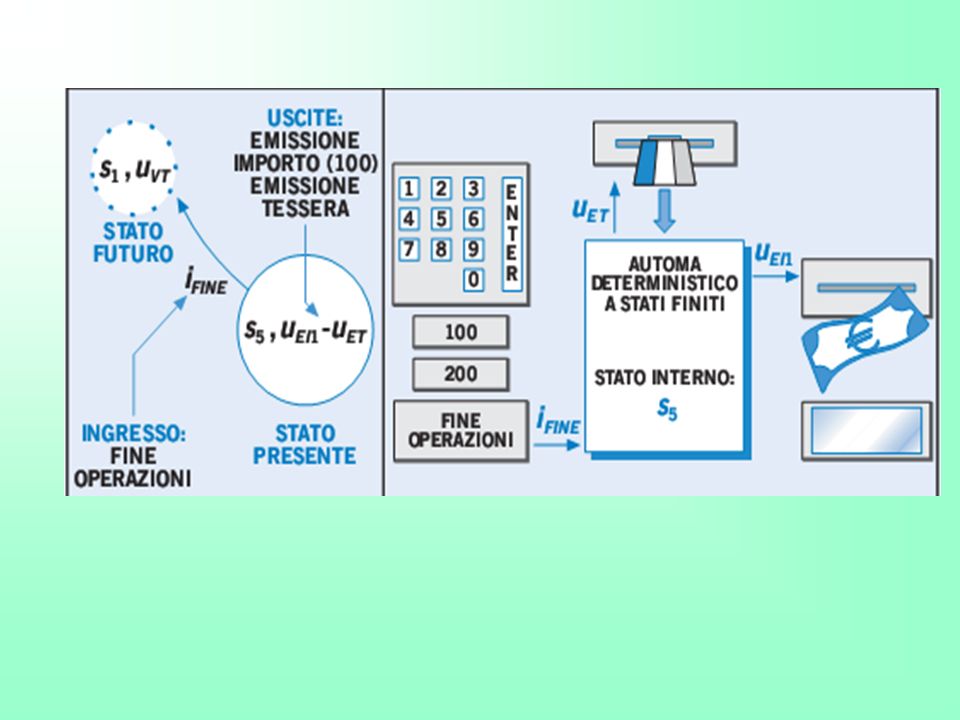
Rappresentazione delle funzioni di transizione e di uscita
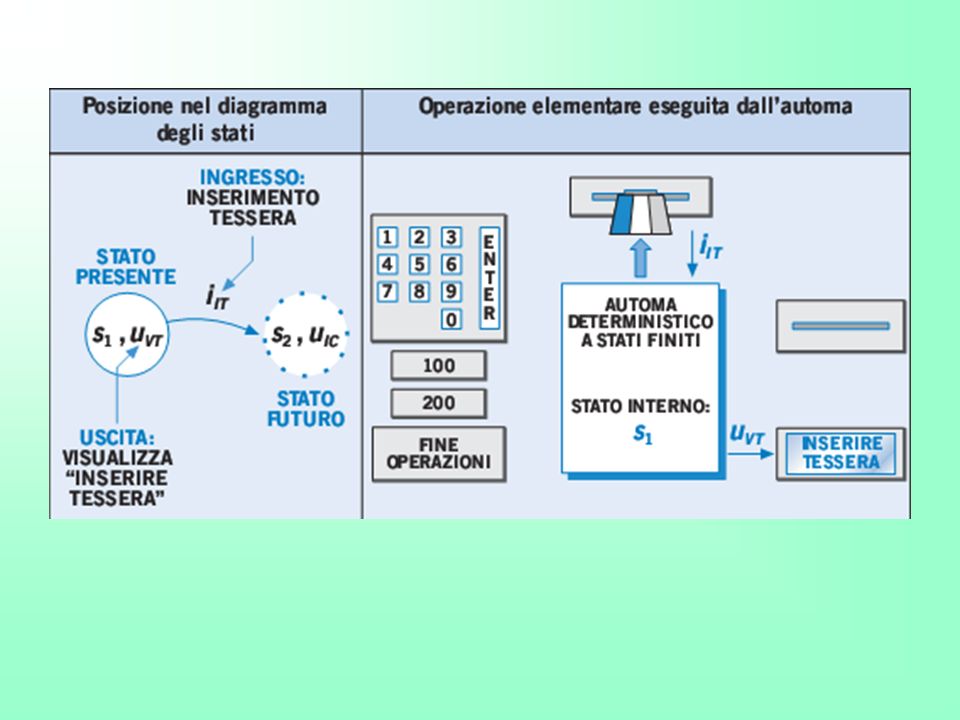
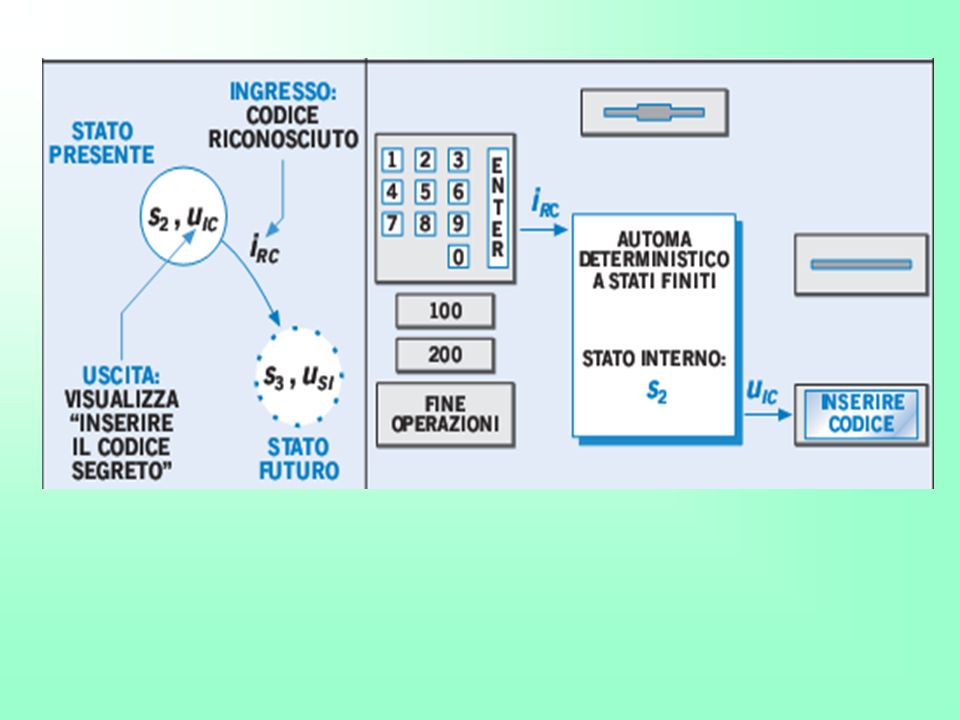
La macchina possiede un insieme finito di stati interni ai quali sono associate le diverse uscite. Il cliente, mentre esegue un’ operazione (ad esempio l’immissione della tessera), causa il passaggio dell’automa da uno stato all’altro In corrispondenza del passaggio da uno stato all’altro la macchina compie una nuova azione (ad esempio l’emissione delle banconote richieste). Per descrivere il funzionamento di un automa, dopo avere elencato gli ingressi, le uscite e gli stati interni, si devono rappresentare le due funzioni di transizione e di uscita. Per la rappresentazione possono essere utilizzate due tipi di tabelle: - la tabella di transizione e delle uscite oppure - il diagramma di transizione degli stati.
, causa il passaggio dell’automa da uno stato all’altro. In corrispondenza del passaggio da uno stato all’altro la macchina compie una nuova azione (ad esempio l’emissione delle banconote richieste). Per descrivere il funzionamento di un automa, dopo avere elencato gli ingressi, le uscite e gli stati interni, si devono rappresentare le due funzioni di transizione e di uscita. Per la rappresentazione possono essere utilizzate due tipi di tabelle: - la tabella di transizione e delle uscite oppure. - il diagramma di transizione degli stati.")
60
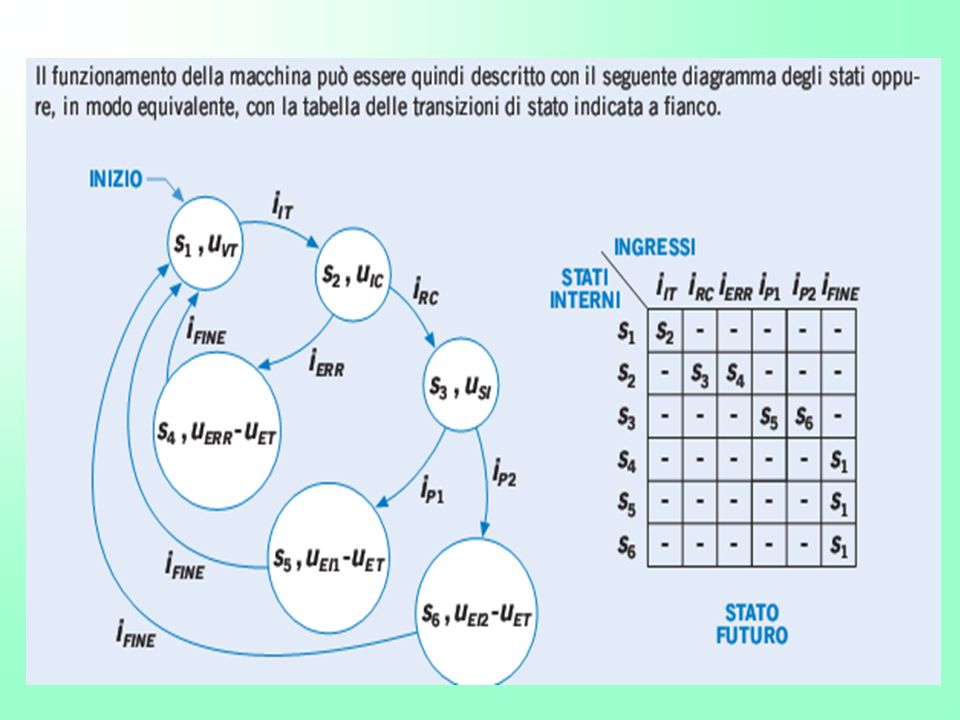
Utilizzando il metodo delle tabelle di transizione (o delle transizioni) e delle uscite tutti gli ingressi e gli stati sono organizzati sulle colonne e sulle righe di due tabelle. Ad esempio, nella tabella di transizione precedente, se la macchina si trova nello stato (attuale)s quando arriva líingresso i passerà nel nuovo stato (futuro) s . Il passaggio da uno stato all’altro è denominato transizione (di stato).
s quando arriva líingresso i passerà nel nuovo stato (futuro) s . Il passaggio da uno stato all’altro è denominato transizione (di stato).")
61
Il diagramma degli stati può essere interpretato affermando che: se il sistema si trova nello stato s , con associata líuscita u , passa nello stato s se viene fornito l’ingresso i, mentre rimane in s finchè arriva l’ingresso i ; in modo analogo, il sistema rimane nello stato s , con associata l’uscita u , finchè arriva l’ingresso i mentre effettua una transizione in s , in corrispondenza di i .

71
Fine

72
Diagrammi di transizione
Il diagramma di transizione è un grafo orientato con tanti nodi quanti sono gli elementi di S,dove ciascun nodo è etichettato con un simbolo di stato. Per ciascuna coppia di stati qi qj si ha un ramo dal nodo qi al nodo qj etichettato con la coppia xi/yi, con yi = g(xi,qi) e qj = f(xi,qi) xi e yi rappresentano rispettivamente ingressi e uscite le funzioni g() ed f() rispettivamente le funzioni di trasformazione delle uscite e di transizione dello stato. Il diagramma dell’automa descritto precedentemente risulta:
 e qj = f(xi,qi) xi e yi rappresentano rispettivamente ingressi e uscite. le funzioni g() ed f() rispettivamente le funzioni di trasformazione delle uscite e di transizione dello stato. Il diagramma dell’automa descritto precedentemente risulta:")
73
Ascensore Un ascensore di un palazzo a due piani accetta la richiesta del piano di destinazione (terra, 1, 2) e restituisce lo spostamento desiderato (su, giù, fermo). Si tratta di un automa in cui S={Pt, 1P, 2P}, Pt= p. terra, 1P= p. primo, 2P= p. secondo; I={T, 1, 2} possibilità offerte dalla pulsantiera; U={Su, Giù, Fermo} spostamenti dell’ascensore. Tabella di transizione:
 e restituisce lo spostamento desiderato (su, giù, fermo). Si tratta di un automa in cui S={Pt, 1P, 2P}, Pt= p. terra, 1P= p. primo, 2P= p. secondo; I={T, 1, 2} possibilità offerte dalla pulsantiera; U={Su, Giù, Fermo} spostamenti dell’ascensore. Tabella di transizione:")
75
Gettoniera Una gettoniera, dopo l’immissione successiva di due monete, emette un gettone. L’insieme degli ingressi è I = {m,0}, dove m rappresenta la moneta e 0 indica che non è stata introdotta alcuna moneta. L’insieme delle uscite è U = {0,g}, dove 0 è nessuna risposta perché la macchina, ricevuta la prima moneta, è in attesa della seconda o non ha ricevuto monete, g rappresenta un gettone. L’insieme degli stati è S = { s1,s2}, dove s1 è lo stato iniziale, quando la gettoniera è in attesa della prima moneta, s2 è lo stato di attesa della seconda moneta.

76
Tab.2 Matrice degli stati: ad ogni coppia ingresso-stato presente associa lo stato successivo assunto dalla macchina

77
Tab.3 Matrice delle uscite: ad ogni coppia ingresso-stato presente associa una risposta in uscita

78
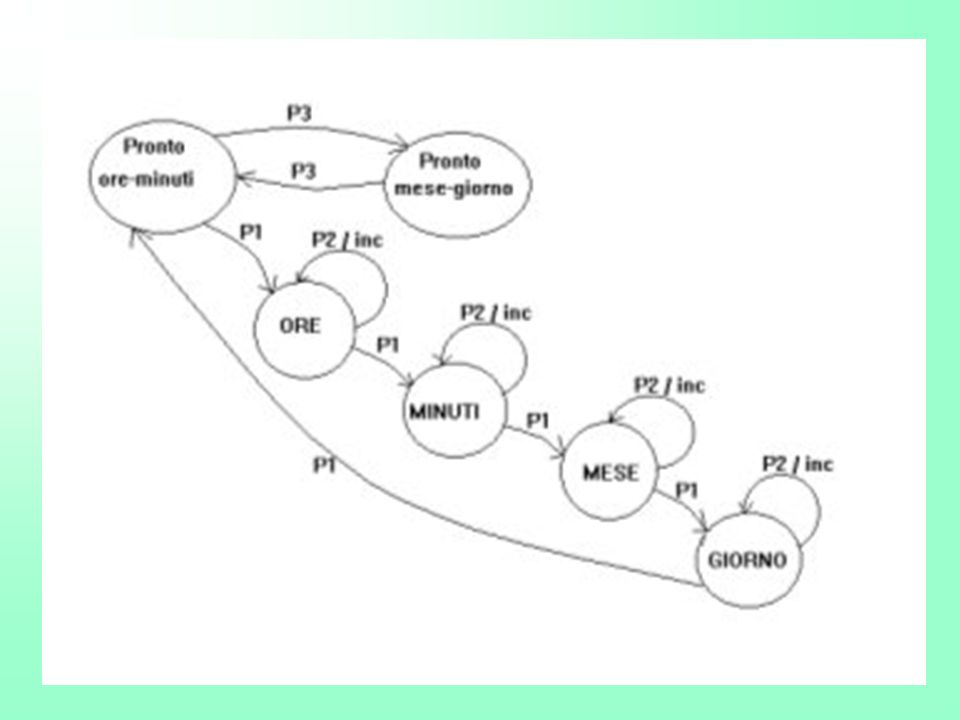
Sistema di regolazione di un orologio digitale
L'orologio è munito di tre pulsanti P1, P2, P3. P1 serve per passare dallo stato in cui il display mostra ore-minuti agli stati di regolazione. P2 serve per incrementare il valore attualmente presente sul display (inc=incrementa), il tasto P3 è un tasto bistabile tra le modalità del display ore-minuti e mese-giorno.
, il tasto P3 è un tasto bistabile tra le modalità del display ore-minuti e mese-giorno.")
80
Retroazione Segnare i legami causali rende più, chiaro il diagramma, ma ha specialmente il vantaggio che permette di determinare rapidamente se i circuiti sono a retroazione positiva (crescita) o negativa (stabilizzazione). Basta effettuare una moltiplicazione algebrica dei segni delle frecce che li compongono: (+) * (+) = (+) retroazione positiva (crescita) (+) * (-) = (-) retroazione negativa (stabilizzazione). (-) * (-) = (+) retroazione positiva (crescita)
 o negativa (stabilizzazione). Basta effettuare una moltiplicazione algebrica dei segni delle frecce che li compongono: (+) * (+) = (+) retroazione positiva (crescita) (+) * (-) = (-) retroazione negativa (stabilizzazione). (-) * (-) = (+) retroazione positiva (crescita)")
81
Esempio: Questo circuito è a retroazione positiva (crescita), perché la moltiplicazione dei segni fornisce un risultato positivo: (+1)*(-1)*(-1)=(+1)
*(-1)*(-1)=(+1)")
82
Esempio: Questo circuito è a retroazione negativa (stabilizzazione), perché la moltiplicazione dei segni fornisce un risultato positivo: (+1)*(-1)*(+1)=(-1) Regola pratica: se il circuito è formato da un numero dispari di frecce col segno meno, il circuito sarà di retroazione negativa; se le frecce col segno meno sono pari o nessuna, la retroazione sarà positiva.
*(-1)*(+1)=(-1) Regola pratica: se il circuito è formato da un numero dispari di frecce col segno meno, il circuito sarà di retroazione negativa; se le frecce col segno meno sono pari o nessuna, la retroazione sarà positiva.")
83
FEEDBACK NEI SISTEMI I circuiti di retroazione negativa tendono verso uno stato definito di stabilità. I circuiti di retroazione positiva sono invece il meccanismo che causa il cambiamento all'interno del sistema. Le variabili si influenzano reciprocamente nella stessa direzione ad un tasso sempre più alto, dando luogo nel tempo ad una crescita di tipo esponenziale. Un esempio di retroazione positiva: La popolazione Se la natalità cresce, la popolazione cresce; se la popolazione cresce, cresce la natalità. Il comportamento "a valanga" della retroazione positiva non dà necessariamente luogo a una crescita: può allo stesso modo dare luogo ad un declino esponenziale. Esiste un punto di equilibrio che fa da spartiacque tra i due comportamenti.

84
Altro esempio: In un conto corrente bancario questo punto di equilibrio è quando il deposito è pari a zero. In questa situazione il sistema resta in equilibrio. Se il deposito è maggiore di zero si assiste alla crescita esponenziale del denaro. Ma se il deposito è inferiore a zero (cioè se il conto è "in rosso"), sono i debiti ad accumularsi (la banca fa pagare un interesse) e il sistema declina in modo esponenziale. Generalmente però non è così semplice stabilire il punto di equilibrio, perchè i sistemi sono costituiti da molti circuiti che si influenzano reciprocamente. In generale si può dire che i circuiti di retroazione positiva tendono ad allontanarsi da un qualche punto di equilibrio instabile. In un sistema essi costituiscono il motore del cambiamento.
, sono i debiti ad accumularsi (la banca fa pagare un interesse) e il sistema declina in modo esponenziale. Generalmente però non è così semplice stabilire il punto di equilibrio, perchè i sistemi sono costituiti da molti circuiti che si influenzano reciprocamente. In generale si può dire che i circuiti di retroazione positiva tendono ad allontanarsi da un qualche punto di equilibrio instabile. In un sistema essi costituiscono il motore del cambiamento.")
85
Modelli matematici Sono molto utilizzati, quando è possibile definirli, per il supporto teorico che forniscono e per la loro possibilità di elaborazione e manipolazione con il calcolatore. Nell’ambito della fisica si fa un grande uso dei modelli matematici nei vari settori di indagine : meccanica, termologia , elettrologia , ottica, ecc. Si può notare come fra grandezze meccaniche ed elettriche esistano delle “analogie” che hanno un interesse sia astratto che sperimentale: da un lato perché una stessa struttura matematica è capace di rappresentare sistemi concreti molto diversi e d’altro lato perché costruendo modelli fisici analoghi ( solitamente elettrici)si riescono a studiare sistemi fisici di varia natura.
si riescono a studiare sistemi fisici di varia natura.")
86
La natura di un modello matematico è strettamente connessa con
le caratteristiche del sistema in studio e del grado di approssimazione con il quale lo si vuole rappresentare. Appare quindi evidente che i modelli possono essere classificati in funzione delle loro caratteristiche principali, si hanno così: · Modelli lineari e non lineari · Modelli statici e dinamici · Modelli continui e discreti

87
Un modello si dice lineare se è applicabile il principio di
sovrapposizione degli effetti tra le variabili d’ingresso e quelle d’uscita. In caso contrario il sistema è classificato del tipo non lineare. Quando le relazioni che legano le variabili d’ingresso e quelle d’uscita sono lineari (algebriche) il modello è detto statico . Se invece la natura delle relazioni fra le variabili è di tipo derivato (equazioni differenziali) il modello si dice dinamico . Infine un modello si dice continuo o discreto a seconda che la variabile indipendente tempo venga fatta variare con continuità o in modo discreto.
 il modello è detto statico . Se invece. la natura delle relazioni fra le variabili è di tipo derivato (equazioni. differenziali) il modello si dice dinamico . Infine un modello si dice continuo o discreto a seconda che la. variabile indipendente tempo venga fatta variare con continuità o in. modo discreto.")
88
Le relazioni funzionali sono esprimibili sotto forma di sistemi di equazioni per i sistemi deterministici, mentre per i sistemi stocastici si applicano utilmente i metodi della probabilità e della statistica servendosi di distribuzioni di variabili aleatorie. Quando non sono note le relazioni funzionali fra variabili ma sono disponibili un numero adeguato di osservazioni sperimentali è anche possibile utilizzare metodi di approssimazione con funzioni polinomiali o altre funzioni matematiche note ecc. In un modello matematico i parametri sono le costanti del modello e sono definite dal progettista: in un esperimento di simulazione si può vedere come può variare il comportamento del sistema in funzione dei parametri ( solo quelli che nel sistema sono effettivamente controllabili ). Le variabili possono assumere solo quei valori che la forma della funzione rende possibili e possono essere indipendenti ( di ingresso) e dipendenti ( di uscita).
. Le variabili possono assumere solo quei valori che la forma della funzione rende possibili e possono essere indipendenti ( di ingresso) e dipendenti ( di uscita).")
89
I vincoli possono essere imposti dal progettista ( es
I vincoli possono essere imposti dal progettista ( es. altezza max del livello di un serbatoio) o imposti dal sistema ( es. non si può fare uscire acqua da un serbatoio vuoto) I criteri sono gli obiettivi che ci si pone nello studio del sistema e i metodi che saranno utilizzati nella valutazione dei risultati. (precisione, approssimazione ecc.)
 o imposti dal sistema ( es. non si può fare uscire acqua da un serbatoio vuoto) I criteri sono gli obiettivi che ci si pone nello studio del sistema e i metodi che saranno utilizzati nella valutazione dei risultati. (precisione, approssimazione ecc.)")
90
Modelli con schemi a blocchi funzionali
Sono modelli che si applicano preferibilmente a impianti che realizzano processi produttivi dove avvengono trasformazioni tendenti alla realizzazione di prodotti predefiniti con l’immissione di energia, risorse e informazione. Ormai si usa la parola processo per indicare trasformazioni di tipo generale e la definizione è: una sequenza temporale di azioni svolte o di comportamenti tenuti da un sistema per realizzare una certa funzione ; le configurazioni assunte dal sistema possono ,in dipendenza dal sistema studiato, costituire uno sviluppo naturale o un’azione forzata da cause esterne. Si presuppone che un processo di una certa complessità sia realizzato in un sistema complesso in cui sono individuabili alcuni sottosistemi più semplici il cui comportamento , se non la costituzione interna, può essere noto ( fase di analisi del sistema).
.")
91
- essere valida per qualsiasi ingresso applicabile
Di ognuno dei sottosistemi è dunque noto quello che fa, cioè la sua relazione funzionale ingresso-uscita che si definisce funzione di trasferimento F.D.T. ingresso uscita Lo schema si configura come un blocco orientato e F.D.T è il rapporto F = U/I F comprende l’intero modello matematico che descrive il comportamento di un sistema e per essere utilizzabile deve: - essere valida per qualsiasi ingresso applicabile - non variare nel tempo. Tali condizioni sono soddisfatte per i sistemi lineari e stazionari.

92
Traccia di metodo di studio di un sistema:
- Identificazione del sistema che si vuole studiare - Ambiente: tutto ciò che può esercitare una significativa influenza sul comportamento del sistema stesso. - Definizione delle uscite che interessano - Identificazione degli ingressi (variabili che influiscono sulle uscite se il sistema è aperto) - Identificazione degli stati ( se il sistema è dinamico) - Elaborazione di un modello. - Definizione del tempo se si tratta di un sistema che cambia nel tempo. - Se gli ingressi sono applicati in modo continuo e i cambiamenti avvengono in modo continuo: tempo continuo. - Se gli ingressi sono applicati in modo discreto e/o i cambiamenti sono discreti: tempo discreto. Nel caso di elaborazione su calcolatore il tempo deve essere comunque discretizzato e deve essere definita una unità di tempo adeguata per il sistema
 - Identificazione degli stati ( se il sistema è dinamico) - Elaborazione di un modello. - Definizione del tempo se si tratta di un sistema che cambia nel tempo. - Se gli ingressi sono applicati in modo continuo e i. cambiamenti avvengono in modo continuo: tempo continuo. - Se gli ingressi sono applicati in modo discreto e/o i cambiamenti sono. discreti: tempo discreto. Nel caso di elaborazione su calcolatore il tempo deve essere comunque. discretizzato e deve essere definita una unità di tempo adeguata per il sistema.")
93
L'uscita può essere discreta o continua.
I sistemi statici non cambiano nel tempo. I sistemi dinamici chiusi evolvono nel tempo verso una condizione di equilibrio e l'evoluzione dipende solo dallo stato. Definizione della funzione di transizione dello stato. Definizione della funzione di uscita. Nel caso di simulazione deve essere definita una opportuna durata dell’esperimento.

94
Sistemi deterministici Esempio 1
Sistema :proiettile sparato verso l'alto con un certo angolo rispetto al terreno con una velocità v, punto materiale Obiettivo: studio del moto, individuare il punto di caduta ecc. Ambiente: sulla terra, agisce dunque la forza peso. Ingressi: Forza istantanea che produce la velocità v + Forza peso che agisce sul corpo istante per istante imprimendo l’accelerazione di gravità . Uscite: variabili che interessa analizzare: ad es. posizione, velocità, Ecinetica, Epotenziale, Ecomplessiva Stati: variabili che istante per istante definiscono lo stato del corpo relativamente all'uscita desiderata. Posizione cioè posizione verticale rispetto a terra, posizione in orizzontale rispetto al punto di partenza , velocità totale o rispetto a ciascuno degli assi. Le variabili di uscita e di ingresso sono intercambiabili. E’ definito il modello matematico del sistema che consta delle note equazioni cinematiche per lo spazio ,la velocità, l’accelerazione.

95
accensione calore calore calore T.A.
Sistemi deterministici Esempio 2 Sistema : riscaldamento di un appartamento Modelli: SCHEMI A BLOCCHI STRUTTURALI timer - caldaia – appartamento Timer Bruciatoreoreore Caldaia Radiatori Aria accensione calore calore calore T.A.

96
Le relazioni causali Il primo passo per analizzare un sistema è individuare le principali relazioni causali che hanno luogo tra le sue parti. Un legame causale viene rappresentato così: Questo diagramma si legge: "Le nascite causano un aumento di popolazione". Si noti che queste relazioni non vanno lette in senso assoluto o esclusivo: nell'esempio, l'aumento di popolazione non dipende esclusivamente dalle nascite: in realtà ci sono molti altri fattori in gioco (la diminuzione della mortalità, ecc.). Un modo più corretto di leggere il diagramma potrebbe essere: "le nascite influenzano l'aumento di popolazione".
. Un modo più corretto di leggere il diagramma potrebbe essere: le nascite influenzano l aumento di popolazione .")
97
I segni delle relazioni causali
I diagrammi causa-effetto diventano più chiari se aggiungiamo un segno ad ogni freccia. Segno positivo Una freccia con il segno positivo indica che se il termine posto in coda alla freccia varia in una direzione, l'elemento verso cui la freccia punta varia nella stessa direzione. Per esempio: "Se cresce il numero di nati, anche la popolazione cresce; se cala il numero di nati, cala anche la popolazione".

98
Segno negativo Una freccia con il segno negativo indica che il termine posto in coda alla freccia fa variare quello verso cui punta in direzione opposta. Per esempio: "Se cresce il numero di morti, la popolazione cala; se cala il numero di morti, cresce la popolazione".

99
Fine

100
Esempio:

Presentazioni simili















 ad ogni istante di tempo t sono v.a. Notazione: X : insieme di.>")





