Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
ALTRE SORGENTI

2
Il Multibeam Il Multibeam permette di acquisire velocemente i dati di profondità utilizzando un sistema di fasci acustici. E' stato anch’ esso sviluppato dalla US Navy negli anni ’60 per la mappatura dei fondali di interesse bellico. Il nome tecnico era: Sonar-Array-Sounding-System (SASS), ribattezzato poi Multibeam (M.B.). Il sistema M.B. se collegato a bordo ad uno special purpose processor è in grado di eseguire la mappa batimetrica in tempo reale, cioè mentre il rilievo è in corso e, fatto importante, realizzando una copertura che è vicina al 100/100 Il principio di funzionamento del multibeam può essere illustrato prendendo in considerazione il Seabeam della General Instruments Inc( USA), riportato nella figura seguente (Figura 2.11). Il trasmettitore è costituito da 20 sorgenti acustiche a 12KHz (12.000Hz) e trasmette impulsi della durata di 7 millisecondi, interessando un angolo solido di 54° x 2.67° perpendicolare alla direzione della nave.
, ribattezzato poi Multibeam (M.B.). Il sistema M.B. se collegato a bordo ad uno special purpose processor è in grado di eseguire la mappa batimetrica in tempo reale, cioè mentre il rilievo è in corso e, fatto importante, realizzando una copertura che è vicina al 100/100. Il principio di funzionamento del multibeam può essere illustrato prendendo in considerazione il Seabeam della General Instruments Inc( USA), riportato nella figura seguente (Figura 2.11). Il trasmettitore è costituito da 20 sorgenti acustiche a 12KHz (12.000Hz) e trasmette impulsi della durata di 7 millisecondi, interessando un angolo solido di 54° x 2.67° perpendicolare alla direzione della nave.")
3
Figura a) fascio trasmesso; b) strips di ricezione; c) intersezione tra i due precedenti, che determina l’area di fondale realmente copertA. Le strips sono estese longitudinalmente “20°”, per tenere conto del moto della nave ed evitare la perdita di segnale in ricezione (da E.J.W Jones,1999). Il sistema ricevente, sempre montato a carena della nave consiste di un array di 40 idrofoni che hanno la capacità di ricevere in un angolo di 2.66° con una profondità di 20° nella direzione di navigazione. L' area di copertura è l' intersezione dell' area di trasmissione con quella di ricezione. Nella figura precedente le aree sono quadrate ma nella realtà sono di forma ellittica. Il processing è tale che le due descrizioni sono equivalenti. La striscia di fondale interessata è suddivisa m 16 aree, ciascuna di esse è esplorata con cadenza di misura di 3.3 millisecondi (300 Hz).E’ neccessario un sistema di stabilizzazione della imbarcazione e/o un sistema di rilevamento di pitch e roll.
.E’ neccessario un sistema di stabilizzazione della imbarcazione e/o un sistema di rilevamento di pitch e roll.")
4
il tow-fish, che comprende i due trasduttori,
SIDE SCAN SONAR Il sistema Side Scan Sonar (S.S.S) o Sonar a scansione laterale è stato sviluppato durante la seconda guerra mondiale per l’individuazione dei sommergibili, successivamente è stato impiegato per numerosi scopi civili. Il primo impiego, con notevoli risultati, in campo archeologico in Italia è stato svolto da F. Giordano e G. Luongo nel 1990 nelle acque del porto di Baia (Figura 2.19). Il sistema di acquisizione di un Side Scan Sonar, è costituito principalmente da (Figura 2.12): il tow-fish, che comprende i due trasduttori, il cavo per la trasmissione dei dati ed il sistema di bordo che comprende un processore, un’unità di controllo ed un registratore Figura Side Scan Sonar (GeoAcustics Ltd) doppia frequenza ( KHz)con massima profondità d’indagine di 1000 metri. Nella figura è riportato il sensore o "tow-fish" che viene trainato dall’imbarcazione e l’unità di controllo. L’immagine del fondale può essere osservata o su uno schermo oppure su un supporto di carta.
 o Sonar a scansione laterale è stato sviluppato durante la seconda guerra mondiale per l’individuazione dei sommergibili, successivamente è stato impiegato per numerosi scopi civili. Il primo impiego, con notevoli risultati, in campo archeologico in Italia è stato svolto da F. Giordano e G. Luongo nel 1990 nelle acque del porto di Baia (Figura 2.19). Il sistema di acquisizione di un Side Scan Sonar, è costituito principalmente da (Figura 2.12): il tow-fish, che comprende i due trasduttori, il cavo per la trasmissione dei dati ed. il sistema di bordo che comprende un processore, un’unità di controllo ed un registratore. Figura Side Scan Sonar (GeoAcustics Ltd) doppia frequenza ( KHz)con massima profondità d’indagine di 1000 metri. Nella figura è riportato il sensore o tow-fish che viene trainato dall’imbarcazione e l’unità di controllo. L’immagine del fondale può essere osservata o su uno schermo oppure su un supporto di carta.")
5
Figura Ripresa Side Scan sonar dei fondali del Mar Mediterraneo (in grigio chiaro) ottenuta dal mosaico di numerose riprese sviluppate da vari gruppi di ricerche (da E.J.W Jones,1999).
 ottenuta dal mosaico di numerose riprese sviluppate da vari gruppi di ricerche (da E.J.W Jones,1999).")
6
Il Side Scan Sonar è uno strumento che permette l’esplorazione di larghe aree di fondale marino in un tempo ristretto e viene comunemente utilizzato su imbarcazioni in movimento con una velocità di crociera tra i 2 – 6 nodi. La principale caratteristica del sonar a scansione laterale consiste nel trasduttore che, essendo di lunghezza multipla (tipicamente 30 volte o più) della lunghezza d'onda, possiede una larghezza di fascio emittente particolarmente ristretta sul piano orizzontale (~ 1 grado) e più larga sul piano verticale (40-60 gradi), fornendo una buona risoluzione di direzionalità. La comprensione del funzionamento del Side Scan Sonar è utile al fine di porre l’operatore e l’interprete in una posizione migliore per sfruttare in modo ottimale le prestazioni dello strumento in fase di esecuzione della campagna, ovvero di comprensione dei dati acquisiti.
 della lunghezza d onda, possiede una larghezza di fascio emittente particolarmente ristretta sul piano orizzontale (~ 1 grado) e più larga sul piano verticale (40-60 gradi), fornendo una buona risoluzione di direzionalità. La comprensione del funzionamento del Side Scan Sonar è utile al fine di porre l’operatore e l’interprete in una posizione migliore per sfruttare in modo ottimale le prestazioni dello strumento in fase di esecuzione della campagna, ovvero di comprensione dei dati acquisiti.")
7
Figura Rappresentazione schematica del funzionamento del SIDE-SCAN-SONAR con un lobo di ricezione e trasmissione di circa 260°. I raggi incidenti sotto angoli piccoli (rispetto alla superficie) saranno riflessi all'indietro verso il ricevitore che coincide con la sorgente, dando luogo all’annerimento della carta sulla registrazione. Ricordiamo che le zone marcate in toni scuri rappresentano le superfici inclinate rispetto all'orizzontale e quindi le asperità. I raggi riflessi saranno quelli che, incidendo sotto angoli piccoli, vengono riflessi indietro verso il “fish” (trasmettitore e ricevitore) (da E.J.W Jones,1999).
 saranno riflessi all indietro verso il ricevitore che coincide con la sorgente, dando luogo all’annerimento della carta sulla registrazione. Ricordiamo che le zone marcate in toni scuri rappresentano le superfici inclinate rispetto all orizzontale e quindi le asperità. I raggi riflessi saranno quelli che, incidendo sotto angoli piccoli, vengono riflessi indietro verso il fish (trasmettitore e ricevitore) (da E.J.W Jones,1999)..")
8
Per comprendere il funzionamento del Side Scan Sonar dobbiamo considerare che il fascio acustico in trasmissione ed in ricezione risulta essere anche 180° sul piano verticale (che risulta perpendicolare alla linea di navigazione) e di 1°/2° sull’orizzontale, come si può vedere dalle figure che rappresentano i lobi di trasmissione e di ricezione (Figura 2.15). Il Side Scan Sonar fornisce come prodotto finale un’immagine su carta o a video risultante dalla “mosaicatura” di tante strisce corrispondenti a successivi segnali ricevuti dal fondale in seguito all’invio di un impulso. Se volessimo assimilare il funzionamento del Side Scan a quello di un sistema di ripresa fotografico lo dovremmo immaginare come composto da due macchine fotografiche poste back-to-back, aventi ciascuna un angolo di ripresa di 90° in verticale e 1°/2° sull’orizzontale.

9
Se immaginiamo che le due macchine scattino una sequenza di fotogrammi mentre procedono, la successione degli scatti posti ciascuno vicino al precedente, fornirà l’immagine del fondale dove le zone d’ombra sono quelle coperte da oggetti sporgenti dal fondale. In realtà il segnale ricevuto dal S.S.S. ha necessità di essere processato da un’ unità di calcolo che serve a correggere geometricamente le immagini e di porcele in visione azimutale partendo dalla radiale. Nel seguito si discuterà sull'interpretazione delle immagine acquisite con il Side Scan Sonar.

10
Il Sonar a scansione laterale, come è stato precedentemente detto, emette un fascio sonoro verso il fondo marino. Quando il segnale colpisce un oggetto, sia sospeso che adagiato sul fondo, questo torna al ricevitore che registrerà il corpo come massimo riflettente, in pratica l’oggetto risulterà nel sonogramma molto scuro in quanto il segnale acustico è tornato, completamente o quasi, indietro. Ovviamente l’oggetto interrompe il viaggio del segnale acustico verso il fondale formando su questo ultimo zone d’ombra sonora (“acoustic shadow”) (Figura 2.17) cioè zone in cui il segnale non arriva affatto o se arriva non viene restituito al “tow-fish” e quindi sul sonogramma risulteranno essere molto chiare.
 (Figura 2.17) cioè zone in cui il segnale non arriva affatto o se arriva non viene restituito al tow-fish e quindi sul sonogramma risulteranno essere molto chiare..")
11
Nel Side Scan Sonar, le ombre acustiche possono essere considerate come gli oggetti interpretativi più importanti e sono i parametri fondamentali per una interpretazione tridimensionale del prodotto bidimensionale dello strumento. Il Sonar a scansione laterale viene principalmente usato per fondali non molto profondi quindi la velocità del suono può essere ragionevolmente considerata costante su tutta la colonna d’acqua e quest’ultima completamente omogenea; questo permette al fascio sonoro di essere dritto e quindi le ombre sonore dipenderanno esclusivamente dagli oggetti che li hanno generati. Individuata questa relazione tra gli oggetti e le corrispondenti ombre sonore è facile riuscire a calcolare l’altezza dell’oggetto, cioè l’unico dato per la costruzione di un modello tridimensionale che non si può ottenere dalla semplice interpretazione del sonogramma. Figura Zone d'ombra sonora ("acoustic shadow")
")
12
La formula che calcola l’altezza di un oggetto è la seguente (Figura 2
L’altezza di un oggetto (Ht) è uguale al prodotto della lunghezza dell’ombra acustica (Ls) per l’altezza del “tow-fish” dal fondale (Hf) diviso per il raggio di copertura laterale (R). Figura Formula per la determinazione dell’altezza di un oggetto ricavata dalla similitudine dei due rettangoli.
 è uguale al prodotto della lunghezza dell’ombra acustica (Ls) per l’altezza del tow-fish dal fondale (Hf) diviso per il raggio di copertura laterale (R). Figura Formula per la determinazione dell’altezza di un oggetto ricavata dalla similitudine dei due rettangoli.")
13
Rilievo di reperti archeologici con il Side Scan sonar
Sull’ immagine Side Scan Sonar (acquisita alla frequenza di 500 kHz), relativa ad una striscia di fondale prospiciente il porto di Baia, è stata effettuata una elaborazione grafica grazie all’utilizzo del software di gestione dell’immagini Corel Draw 12. Tale immagine è costituita da 653x3315 pixel con scala di grigi a 8 bit. Figura :Area di investigazione del Side Scan Sonar nel Golfo di Pozzuoli e precisamente nel porto di Baia.
, relativa ad una striscia di fondale prospiciente il porto di Baia, è stata effettuata una elaborazione grafica grazie all’utilizzo del software di gestione dell’immagini Corel Draw 12. Tale immagine è costituita da 653x3315 pixel con scala di grigi a 8 bit. Figura :Area di investigazione del Side Scan Sonar nel Golfo di Pozzuoli e precisamente nel porto di Baia.")
14
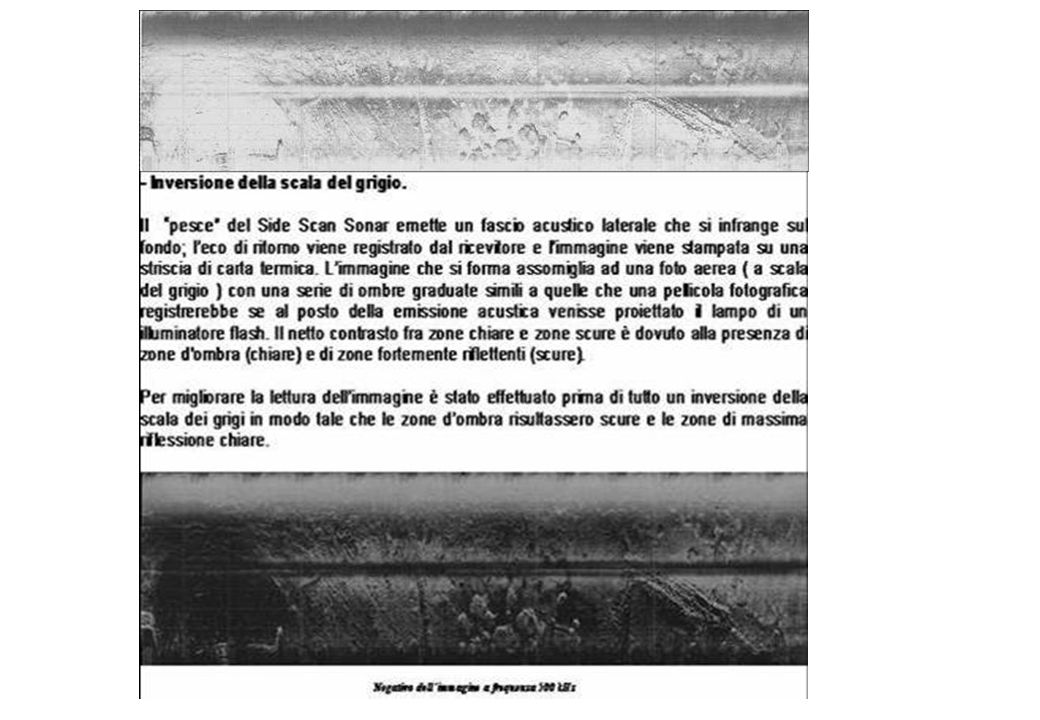
Per migliorare la lettura del sonogramma è stato effettuato prima di tutto un processo di inversione della scala dei grigi in modo tale che le zone d’ombra risultino scure e le zone di massima riflessione chiare; poi una equalizzazione dell’istogramma per migliorare i contrasti ed un filtraggio per eliminare i disturbi indesiderati. Tali disturbi sono stati eliminati con un filtro mediano 3x3, che a ciascun valore della matrice di pixel sostituisce il valore “mediano” dei pixel vicini. Quindi l’effetto del filtro mediano è di forzare i pixel ad assumere un valore tendente a quello dei pixel circostanti, eliminando così eventuali valori di intensità eccessiva, che si manifestano con il cosiddetto effetto sale e pepe.

15
Questo processo ha migliorato qualitativamente l’interpretazione dell’immagine, infatti ha reso più accentuato il contrasto tra i vari livelli di grigio in modo tale da rendere più visibili gli oggetti situati sul fondale ed esaltare le “ombre sonore” prodotte da essi quando sono colpiti dal fascio laterale del Side Scan Sonar.

16
Elaborazione di un immagine Side Scan Sonar relativa ad una striscia di fondale di fronte il porto di Baia acquisita il 6/11/1990 . Grazie all’utilizzo del software di gestione dell’immagini “Corel Draw 12” è stata effettuata una elaborazione grafica del sonogramma preso in esame, questo, infatti, ha subito un processo di inversione delle tonalità di grigio, una equalizzazione dell’istogramma per migliorare i contrasti ed un filtraggio per eliminare i rumori causati dalla strumentazione. Questo processo ha migliorato qualitativamente l’interpretazione dell’immagine cioè risultano più evidenti gli oggetti situati sul fondale ma soprattutto sono perfettamente riconoscibili e misurabili le “ombre sonore”. Queste ultime sono l’unico indizio che un sonogramma fornisce per una visione tridimensionale di un elaborato bidimensionale. Una volta individuate le ombre, tramite una formula che mette in relazione queste con gli oggetti che le hanno generate, si è calcolato l’altezza degli oggetti e si proceduto ad una elaborazione tridimensionale di uno di questi ( Villa dei Pisoni ). Inoltre grazie all’utilizzo di un software GIS si è proceduto ad una georeferenzazione dell’immagine ed una sovrapposizione di quest’ultima su di una cartina del porto di Baia. Questo processo è stato effettuato per rendere meglio deducibile la locazione geografica della registrazione effettuata.
. Inoltre grazie all’utilizzo di un software GIS si è proceduto ad una georeferenzazione dell’immagine ed una sovrapposizione di quest’ultima su di una cartina del porto di Baia. Questo processo è stato effettuato per rendere meglio deducibile la locazione geografica della registrazione effettuata.")
17
E' il VI secolo d.C., e il dotto epigono della latinità Cassiodoro illustra, per conto del re ostrogoto Atalarico, le meraviglie dei luoghi baiani. Baia è ormai divenuta leggendaria e i contorni della realtà appaiono trasformati in una visione di sapore romantico. Ricorrono nella descrizione gran parte dei luoghi comuni derivati dalla letteratura precedente. Tuttavia anche in questa cornice quasi fantastica si ritrovano quelle che da sempre erano state le componenti del fascino dell'antica Baia: la bellezza impareggiabile dei luoghi, combinata con la presenza delle fonti idrotermali, e la magnificenza delle trasformazioni apportate dall'uomo che modella la natura per trarne beneficio e piacere. Se in epoca greca Baia dovette essere probabilmente uno degli approdi posti sotto il controllo di Cuma (come dimostra il ritrovamento, presso Punta Epitaffio, di numerose ancore di quel periodo), il suo nome appare per la prima volta solo nel III sec. a.C., quando il poeta Licofrone, ripercorrendo le peregrinazioni di Odisseo, vi colloca la tomba del nocchiero Baios, da cui sarebbe poi derivato il toponimo del sito, rimasto oggi immutato. Cause prime dell'abbandono e della rovina furono, tuttavia, eventi naturali come il fenomeno del bradisismo. L'inabissamento graduale della costa sembra comunque aver conosciuto un aggravamento repentino e imprevisto tra il VII e l' VIII secolo d.C.. A tutt'oggi, dell'intera estensione dei monumenti baiani conservati, solo una parte è visibile sopra il livello del mare. Il resto è sommerso ad una profondità variabile tra i cinque e i dieci metri e si estende per oltre 400 metri in avanti, rispetto alla linea di costa attuale. I monumenti più importanti sommersi, tutt’ora visibili tramite escursioni archeologiche subacquee sono: A) Il Ninfeo di Claudio, sito a -7 m ca. sui fondali marini antistanti Punta Epitaffio. B) Le Terme di età domizianea ( d.C.) uniche nel suo genere. C) Una villa imponente sorse in età adrianea ( d.C.) a sud-est di Punta Epitaffio, attribuita alla famiglia dei Pisoni per i bolli impressi su una conduttura idrica di piombo. F) Il canale di accesso del Baianus lacus, lago costiero citato da Seneca, Tacito e Marziale, scomparso per il bradisismo, ma riconoscibile dai resti antichi sulle sponde.
 Il Ninfeo di Claudio, sito a -7 m ca. sui fondali marini antistanti Punta Epitaffio. B) Le Terme di età domizianea ( d.C.) uniche nel suo genere. C) Una villa imponente sorse in età adrianea ( d.C.) a sud-est di Punta Epitaffio, attribuita alla famiglia dei Pisoni per i bolli impressi su una conduttura idrica di piombo. F) Il canale di accesso del Baianus lacus, lago costiero citato da Seneca, Tacito e Marziale, scomparso per il bradisismo, ma riconoscibile dai resti antichi sulle sponde.")
18
"Lì, dicono, il sole è più splendente e l'aria salubre e il clima mite rendono la natura più seducente. Lì la mente umana entra in contatto con un mondo misterioso, né per questo cessa di ammirare ciò che può conoscere (...). La terraferma appare come proiettata nel mare, i pesci pascolano come mandrie in cattività e la pesca prevista è così piacevole che si rallegra l'animo di coloro che osservano in attesa di un lauto banchetto (...). Le terme, alimentate da vapori caldi, sono più salubri di qualsiasi bagno riscaldato artificialmente, poiché la Natura eccelle di gran lunga l'umano ingegno (...) Nulla è più eccelso dei lidi baiani, dove si unisce la possibilità di avere delizie dolcissime e di appagarsi dell'impareggiabile dono della salute." (Cassiodoro, Variae, IX, 6, 6) .
. La terraferma appare come proiettata nel mare, i pesci pascolano come mandrie in cattività e la pesca prevista è così piacevole che si rallegra l animo di coloro che osservano in attesa di un lauto banchetto (...). Le terme, alimentate da vapori caldi, sono più salubri di qualsiasi bagno riscaldato artificialmente, poiché la Natura eccelle di gran lunga l umano ingegno (...) Nulla è più eccelso dei lidi baiani, dove si unisce la possibilità di avere delizie dolcissime e di appagarsi dell impareggiabile dono della salute. (Cassiodoro, Variae, IX, 6, 6) ..")
19
Elaborazione dell’immagine.
L’immagine Side Scan Sonar acquisita il 6/11/1990 presso il porto commerciale di Baia rappresenta una striscia di fondale di circa 300 metri registrata tra le e le E’ stata eseguita un’esplorazione a doppia frequenza ( kHz ), con il vantaggio di penetrare sotto la vegetazione subacquea e sotto il fondale fangoso usando la bassa frequenza ma riuscendo ad avere una lettura accurata con l’alta frequenza da 500 kHz Infatti man mano che aumentiamo la frequenza di lavoro del trasduttore diminuisce il campodi copertura laterale ma aumenta la risoluzione dell’immagine, permettendo una migliore osservazione del fondale marino e di eventuali oggetti sommersi. L’elaborazione dell’immagine si è concentrata unicamente sulla registrazione a 500 kHz essendo quella in grado di dare maggiori informazioni.
, con il vantaggio di penetrare sotto la vegetazione subacquea e sotto il fondale fangoso usando la bassa. frequenza ma riuscendo ad avere una lettura accurata con l’alta frequenza da 500 kHz. Infatti man mano che aumentiamo la frequenza di lavoro del trasduttore diminuisce il campodi copertura laterale. ma aumenta la risoluzione dell’immagine, permettendo una migliore osservazione del fondale marino e di eventuali. oggetti sommersi. L’elaborazione dell’immagine si è concentrata unicamente sulla registrazione a 500 kHz essendo. quella in grado di dare maggiori informazioni.")
21
Eliminazione del rumore.
Una volta ottenuto il negativo si è passato alla rimozione del “rumore” ( “noise” ) per aumentare l’interpretazione dell’immagine. Come ogni strumento di esplorazione sonora anche il Side Scan Sonar è affetto dal “rumore strumentale” cioè da una serie di disturbi di fondo (ad es. il pulsare del motore, il fruscio delle eliche, le vibrazioni dello scafo) dell’imbarcazione di appoggio; anche se come già detto prima uno dei vantaggi del “tow-fish” ( il trasduttore rimorchiato ) è proprio quello di ridurre notevolmente questi rumori rispetto a tutte le apparecchiature acustiche montate solidamente allo scafo. L’immagine ottenuta invertendo la scala del grigio risulta essere molto scura; per renderla più chiara, l’immagine è stata “equalizzata” cioè i valori di luminosità dei pixel nell’immagine sono stati ridistribuiti affinché rappresentino più uniformemente tutto l'intervallo dei livelli di luminosità. Corel Draw trova i valori più luminosi e più scuri nell'immagine composita e li rimappa affinché il valore più luminoso sia il bianco e il valore più scuro sia il nero, ed inoltre tenta di equalizzare la luminosità, cioè di distribuire uniformemente i valori dei pixel intermedi lungo la scala del grigio. Una volta ottenuta un’immagine con una giusta equalizzazione delle tonalità di grigio si è passati alla rimozione del rumore con un filtro mediano 3x3.
 per aumentare l’interpretazione dell’immagine. Come ogni strumento di esplorazione sonora anche il Side Scan Sonar è affetto dal rumore strumentale cioè da una serie di disturbi di fondo (ad es. il pulsare del motore, il fruscio delle eliche, le vibrazioni dello scafo) dell’imbarcazione di appoggio; anche se come già detto prima uno dei vantaggi del tow-fish ( il trasduttore rimorchiato ) è proprio quello di ridurre notevolmente questi rumori rispetto a tutte le apparecchiature acustiche montate solidamente allo scafo. L’immagine ottenuta invertendo la scala del grigio risulta essere molto scura; per renderla più chiara, l’immagine è stata equalizzata cioè i valori di luminosità dei pixel nell’immagine sono stati ridistribuiti affinché rappresentino più uniformemente tutto l intervallo dei livelli di luminosità. Corel Draw trova i valori più luminosi e più scuri nell immagine composita e li rimappa affinché il valore più luminoso sia il bianco e il valore più scuro sia il nero, ed inoltre tenta di equalizzare la luminosità, cioè di distribuire uniformemente i valori dei pixel intermedi lungo la scala del grigio. Una volta ottenuta un’immagine con una giusta equalizzazione delle tonalità di grigio si è passati alla rimozione del rumore con un filtro mediano 3x3.")
22
Il filtro mediano è un filtro non lineare cioè che a differenza di quelli lineari,ad esempio il filtro average, che sostituiscono un valore con una combinazione lineare dei valori adiacenti, sostituisce ad un determinato pixel il valore "mediano" dei suoi vicini; per mediano si intende quel valore che soddisfa la seguente relazione: Questo filtro si basa su una finestra quadrata o rettangolare che si muove sull’immagine e, per ogni punto, l’uscita del filtro è la mediana statistica dell’insieme di punti N interni alla finestra: tale numero, N, è dispari, in modo da definire in modo univoco il valore mediano. Al contrario, per un numero di punti pari, la mediana non è univocamente identificabile . Proprietà interessanti del filtro mediano sono:
![]()
23
Proprietà interessanti del filtro mediano sono:
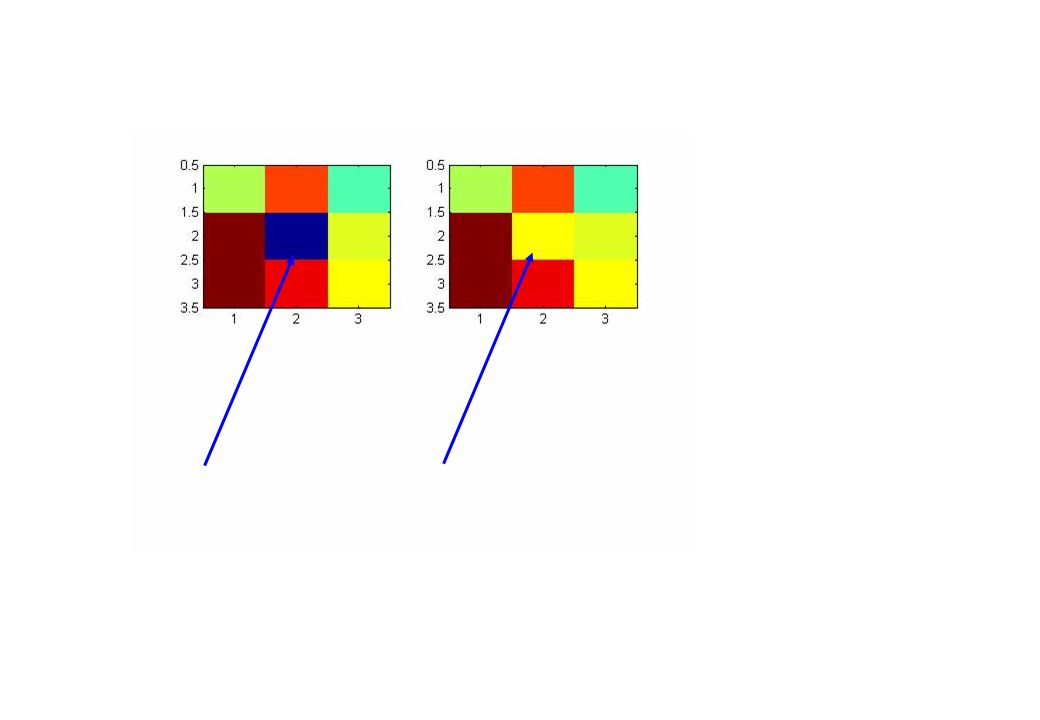
- eliminazione del rumore impulsivo, mantenimento delle transizioni rapide e dei contorni. Per esempio, dato un frammento di immagine a scala di grigi/colore seguente, un filtro mediano 3 x 3 opera nel modo illustrato: 52 29 filtro mediano Pertanto, nell’intorno di ogni riquadro (9 pixel) si devono ordinare i valori dei pixel in esso contenuti, compreso quello centrale, ed il valore mediano di essi è assegnato al pixel centrale. Nell’esempio: 29, 35, 38, 40, 52, 57, 107, 110, 115
 si devono ordinare i valori dei pixel in esso contenuti, compreso quello centrale, ed il valore mediano di essi è assegnato al pixel centrale. Nell’esempio: 29, 35, 38, 40, 52, 57, 107, 110, 115.")
24
x=[35 52 29 115 107 38 110 57 40] %Valori nel quadrato median(x)=52
Calcolo della mediana di una matrice viene fatto per colonne per questo abbiamo trasf. La matrice in riga-in alternativa usiamo il com median(median(x)) median(x)=52 x(5)=52; xc=[ x(5) ]; x=[ ; ; ]: x = P.s. provare a mettere 0 al posto di 107
![x=[ ] %Valori nel quadrato median(x)=52](http://slideplayer.it/slide/577229/2/images/24/x%3D%5B+%5D+%25Valori+nel+quadrato+median%28x%29%3D52.jpg "Calcolo della mediana di una matrice viene fatto per colonne per questo abbiamo trasf. La matrice in riga-in alternativa usiamo il com median(median(x)) median(x)=52. x(5)=52; xc=[ x(5) ]; x=[ ; ; ]: x = P.s. provare a mettere 0 al posto di 107.")
25
x=[ ; ; ] %val iniziale x = %matrice iniziale subplot(2,2,1);image(x) xr = median(xr) ans= 40 x(5)=median(xr) xc=[x(1:3);x(4) x(5) x(6); x(7:9)]; %matr val finale subplot(2,2,2);image(x)
![x=[ ; ; ] %val iniziale x = %matrice iniziale.](http://slideplayer.it/slide/577229/2/images/25/x%3D%5B+%3B+%3B+%5D+%25val+iniziale+x+%3D+%25matrice+iniziale..jpg "subplot(2,2,1);image(x) xr = median(xr) ans= 40. x(5)=median(xr) xc=[x(1:3);x(4) x(5) x(6); x(7:9)]; %matr val finale subplot(2,2,2);image(x)")
Presentazioni simili











>")





 Propagazione delle onde sismiche a scala globale – Localizzazione ipocentrale e reti sismiche.>")

