Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Prof. Gino Dini – Università di Pisa

2
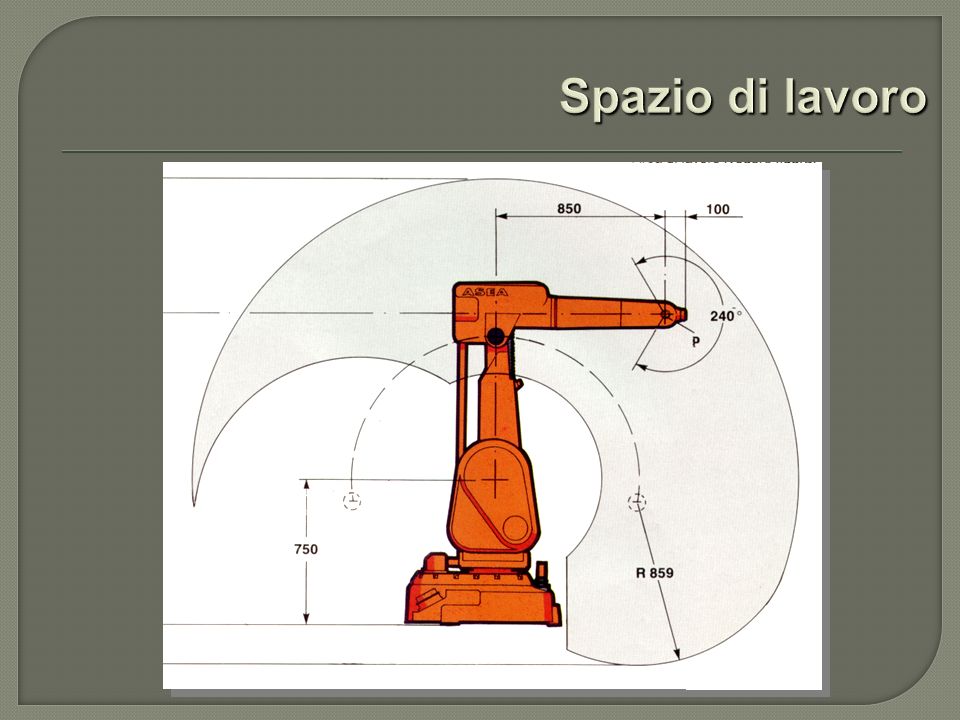
Struttura Struttura Gradi di libertà Gradi di libertà Spazio di lavoro Spazio di lavoro Capacità di carico Capacità di carico Velocità di lavoro Velocità di lavoro Tipo di azionamento Tipo di azionamento Precisione di posizionamento e ripetibilità Precisione di posizionamento e ripetibilità

5
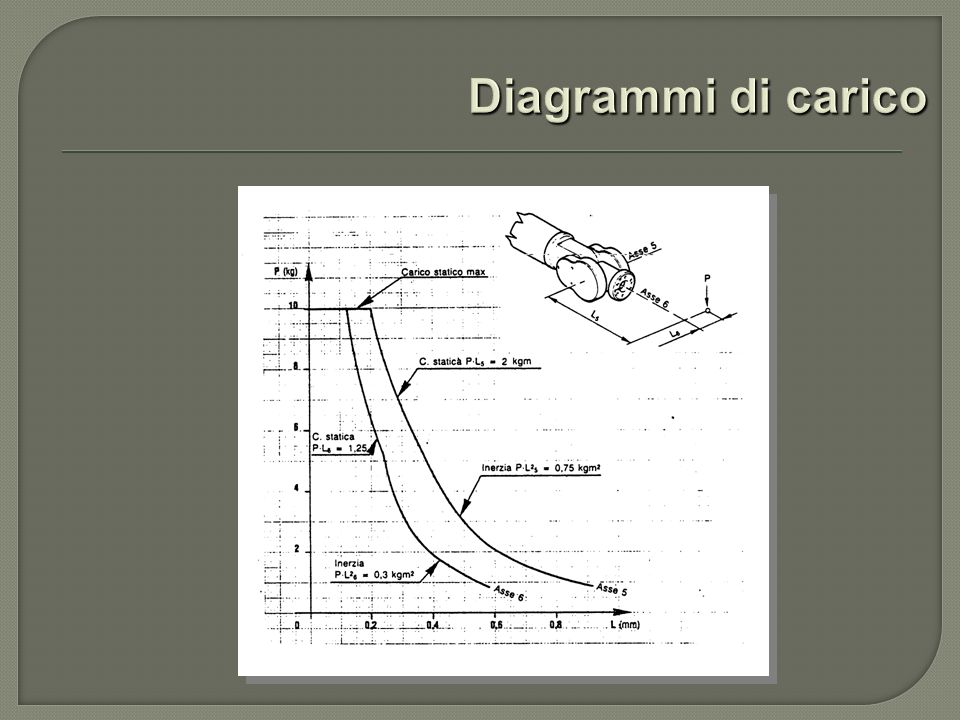
Carico massimo

8
asse robot V max grande spostamento piccolo spostamento

9
Elettrico Elettrico Oleodinamico Oleodinamico Pneumatico (solo pick-and-place) Pneumatico (solo pick-and-place)
 Pneumatico (solo pick-and-place)")
10
0 PT asse robot Errore di posizionam. Ripetibilità ± 3 ± 3

11
OsservazioneValore raggiuntoScartoScarto quadratico 1100,36 0,01330,00017778 2100,37 0,02330,00054444 3100,34 0,00670,00004444 4100,33 0,01670,00027778 5100,36 0,01330,00017778 6100,34 0,00670,00004444 7100,36 0,01330,00017778 8100,32 0,02670,00071111 9100,33 0,01670,00027778 10100,34 0,00670,00004444 11100,37 0,02330,00054444 12100,34 0,00670,00004444

12
Asse X X p1 X p2 X p3 X p4 X p5 X p6 Errore X 6 3 3 A A

14
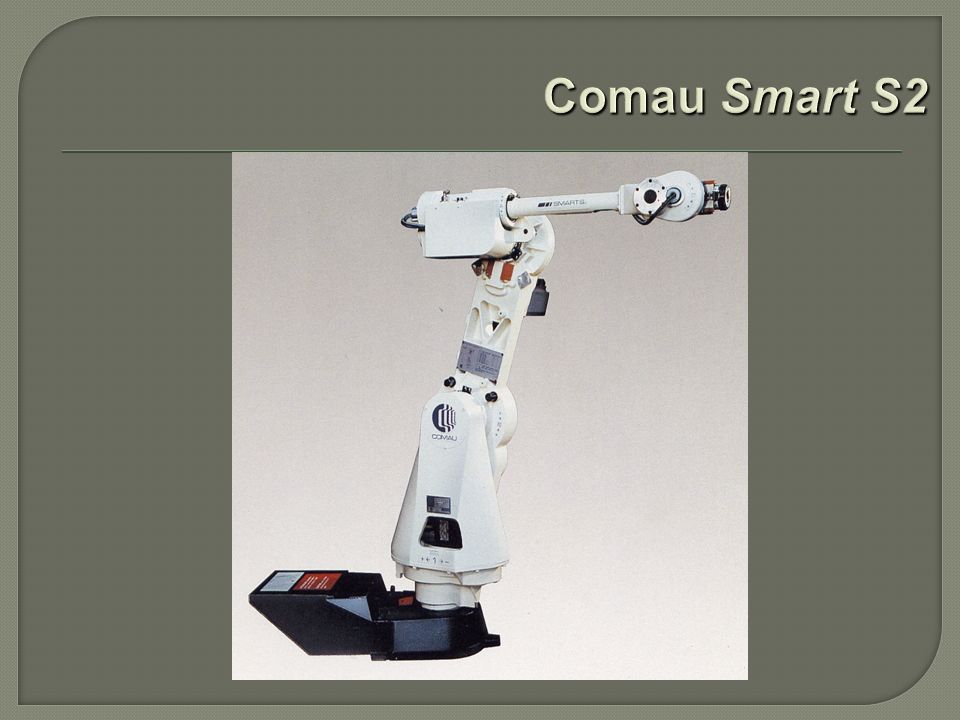
Numero assi: 6 Capacità di carico statica: 8 kg Massimo carico totale: 16 kg Massima coppia statica: asse 5 2 kgm asse 6 1,5 kgm Corsa e velocità massima degli assi: asse 1 ±152,5° 160°/s asse 2 ±105° 115°/s asse 3 +125° -155° 200°/s asse 4 ±210° 430°/s asse 5 ±125° 360°/s asse 6 ±2700° 300°/s Precisione di ripetibilità: ±0,1 mm Azionamenti: motori brushless Trasduttori di posizione: resolver assoluti

16
Numero assi: lineare 2+2 area 3+2 Capacità di carico statica: 25 kg Corsa degli assi: asse 1 area 1÷10 m asse 2 lineare 1÷10 m area 0,8÷1,6 m asse 3 lineare 0,4÷1 m area 0,4÷1 m Velocità degli assi: asse 1 area 2 m/s asse 2 lineare 2 m/s area 2 m/s asse 3 lineare 1,25 m/s area 1,25 m/s Precisione di ripetibilità: ±0,05 ÷ ±0,15 mm Azionamenti: motori brushless Trasduttori di posizione: resolver assoluti Assi opzionali: asse 4 400° 200°/s 15 kg asse 5 400° 200°/s 12 kg asse 4+5 8 kg

18
Numero assi: 4 Capacità di carico statica: 2/5 kg Forza sul piano X-Y: 60/150 N Forza lungo Z: 200/300 N Coppia attorno a Z: 5/10 Nm Corsa degli assi: asse 1 ± 280° asse 2 ± 310° asse 3 200 mm (opzionali 400 e 600 mm) asse 4 ± 180° Velocità assi: asse 1 e 2 assieme 6,3 m/s asse 1 290°/s asse 2 360°/s asse 3 1600 mm/s asse 4 1200°/s
 asse 4 ± 180° Velocità assi: asse 1 e 2 assieme 6,3 m/s asse 1 290°/s asse 2 360°/s asse mm/s asse °/s")
20
Numero assi: 6 Capacità di carico statica: 180 / 150 / 130 kg (tre versioni) Carico supplementare: 100 kg Volume utile di lavoro: 55 / 72,9 / 93 m 3 Distanza massima raggiungibile: 2700 / 2900 / 3100 mm Peso: 1267 / 1277 / 1285 kg Precisione di ripetibilità: ± 0,15 mm Sito web: http://www.kuka-roboter.de
 Carico supplementare: 100 kg Volume utile di lavoro: 55 / 72,9 / 93 m 3 Distanza massima raggiungibile: 2700 / 2900 / 3100 mm Peso: 1267 / 1277 / 1285 kg Precisione di ripetibilità: ± 0,15 mm Sito web:")
Presentazioni simili












>")





 Possibili moti di un.>")





