Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Fondamenti di Automatica
Luigi Chisci, Università di Firenze CdL Ingegneria dell’Informazione CdL Ingegneria dell’Ambiente e delle Risorse Prato, A.A

2
Automatica Automatica: settore scientifico disciplinare con competenze di sistemistica (modellistica matematica di sistemi reali), controllistica (metodologie per la soluzione di problemi di controllo), automazione e robotica (supervisione e coordinamento di macchine e impianti finalizzati alla realizzazione di processi produttivi). Fondamenti di Automatica: elementi di sistemistica (modellistica, simulazione e analisi di sistemi dinamici) elementi di controlli automatici (analisi e sintesi di sistemi di controllo a retroazione)
, controllistica (metodologie per la soluzione di problemi di controllo), automazione e robotica (supervisione e coordinamento di macchine e impianti finalizzati alla realizzazione di processi produttivi). Fondamenti di Automatica: elementi di sistemistica (modellistica, simulazione e analisi di sistemi dinamici) elementi di controlli automatici (analisi e sintesi di sistemi di controllo a retroazione)")
3
Cosa è l’Automatica ? Automatico: che può funzionare senza l’intervento di un operatore umano Automatica: complesso di discipline che forniscono strumenti per la progettazione e la realizzazione di sistemi automatici, ad esempio pilota automatico di un velivolo (veicolo, natante) commerciale climatizzatore di un ambiente, edificio, serra sistema automatizzato di produzione industriale (carta, tessuti, prodotti alimentari, circuiti integrati, prodotti chimico-farmaceutici e petrolchimici, pezzi meccanici etc.) sistema per la depurazione delle acque o per lo smaltimento dei rifiuti controllo di livello di un fiume (lago, serbatoio idrico etc.)
 commerciale. climatizzatore di un ambiente, edificio, serra. sistema automatizzato di produzione industriale (carta, tessuti, prodotti alimentari, circuiti integrati, prodotti chimico-farmaceutici e petrolchimici, pezzi meccanici etc.) sistema per la depurazione delle acque o per lo smaltimento dei rifiuti. controllo di livello di un fiume (lago, serbatoio idrico etc.)")
4
Problemi di controllo Nella conduzione di apparati ingegneristici di varia natura emergono numerosi problemi di controllo Problema di controllo: si desidera che certe variabili del sistema di interesse si comportino nel modo desiderato corrispondente ad un funzionamento corretto e ottimale del sistema Esempi di problemi di controllo controllo di temperatura (forno, ambiente, reattore nucleare etc.) controllo di pressione (cabina pressurizzata, reattore nucleare etc.) controllo di velocità (motore elettrico, veicolo etc.) controllo di posizione (raggio laser, antenna, radar, telescopio, manipolatore robotico etc.) controllo di forza (manipolatore robotico) controllo di livello (serbatoio idrico, lago, fiume etc.) controllo di concentrazione (processo chimico) controllo di portata controllo di tensione (generatore elettrico, alimentatore, convertitore etc.)
 controllo di pressione (cabina pressurizzata, reattore nucleare etc.) controllo di velocità (motore elettrico, veicolo etc.) controllo di posizione (raggio laser, antenna, radar, telescopio, manipolatore robotico etc.) controllo di forza (manipolatore robotico) controllo di livello (serbatoio idrico, lago, fiume etc.) controllo di concentrazione (processo chimico) controllo di portata. controllo di tensione (generatore elettrico, alimentatore, convertitore etc.)")
5
1. ELEMENTI COSTITUTIVI DI UN PROBLEMA DI CONTROLLO
z y SISTEMA SOTTO CONTROLLO, P (Processo) u = variabili di controllo (manipolabili) d = disturbi (non manipolabili) variabili di ingresso: variabili di uscita: z = variabili controllate y = variabili misurate COMPORTAMENTO DESIDERATO z(t) r(t) ( r = riferimento = uscita desiderata )
 u = variabili di controllo (manipolabili) d = disturbi (non manipolabili) variabili di ingresso: variabili di uscita: z = variabili controllate. y = variabili misurate. COMPORTAMENTO DESIDERATO. z(t) r(t) ( r = riferimento = uscita desiderata )")
6
Sistema di Controllo Obiettivo: z(t) r(t) ovvero e(t) = r(t) - z(t) 0 disturbi d variabili controllate z Processo variabili di controllo variabili misurate u Controllore automatico y Attuatori Sensori disturbi di misura v riferimento r

7
ESEMPIO Controllo della temperatura in un ambiente riscaldato ad aria
Ti, α T Ta z = T (temperatura media dell’ambiente) u = α (apertura della serranda che regola la portata dell’aria immessa a temperatura Ti) d = Te (temperatura esterna) y = Ta (temperatura aria estratta) r = 20°C (temperatura desiderata)
 u = α (apertura della serranda che regola la portata dell’aria immessa a temperatura Ti) d = Te (temperatura esterna) y = Ta (temperatura aria estratta) r = 20°C (temperatura desiderata)")
8
2.1. CONTROLLO AD ANELLO APERTO
2. SISTEMI DI CONTROLLO 2.1. CONTROLLO AD ANELLO APERTO Le variabili di ingresso del controllore, utilizzate per generare il comando, sono indipendenti dal comando stesso ESEMPI z P2 P1 C d S u y r P d r C u P z P = impianto ( + sensore (S) ) C = controllore ( +attuatore )
 ) C = controllore ( +attuatore )")
9
C = controllore ( + attuatore )
2.2.CONTROLLO AD ANELLO CHIUSO (O A RETROAZIONE) Le variabili di ingresso del controllore, utilizzate per generare il comando, sono influenzate dal comando stesso ESEMPI d d r C u P z r C u P z y P = impianto ( + sensore ) C = controllore ( + attuatore )
 Le variabili di ingresso del controllore, utilizzate per generare il comando, sono influenzate dal comando stesso. ESEMPI. d. d. r. C. u. P. z. r. C. u. P. z. y. P = impianto ( + sensore ) C = controllore ( + attuatore )")
10
3. ANELLO DI CONTROLLO C P + _ d r e u z=y
L’azione di controllo u dipende dall’entità dell’errore Sistema di controllo d e r Specifiche di controllo adeguata precisione (statica e dinamica) adeguata stabilità (incertezza)
 adeguata stabilità (incertezza)")
11
4. ESEMPIO SISTEMA DI CONTROLLO
4.1. Controllo del livello di un serbatoio Att. Idraul. Controllore galleggiante qu qi h* q h o condotta q q= portata volumetrica di fluido all’inizio della condotta h= livello del serbatoio qi= portata volumetrica di fluido in ingresso al serbatoio qu= portata volumetrica di fluido in uscita dal serbatoio

12
- r + z C P1 P2 S r=h* z=h u=q P1(s) = exp(-sT) P2(s) = K/(1+τs)
Regolatore+Attuatore+Valvole condotta serbatoio r + z u C P1 P2 - Impianto sotto controllo, P S galleggiante Il ritardo T dipende dalla lunghezza e dalla sezione della condotta e dalla portata nominale del fluido Il guadagno K e la costante di tempo del serbatoio dipendono dalla superficie a pelo libero e di uscita del sebatoio e dalla portata nominale del fluido r=h* z=h u=q P1(s) = exp(-sT) P2(s) = K/(1+τs)
 = exp(-sT) P2(s) = K/(1+τs)")
13
4. CONTROLLO DI PROCESSO l Tu wi, Ti, Hi To, Ho Q
Problema: regolare la temperatura Tu in uscita dalla tubazione agendo sulla portata di ingresso wi dello scambiatore wi: portata di fluido in ingresso allo scambiatore Ti, To: temperatura del fluido in ingresso e all’uscita dello scambiatore Hi, Ho: entalpie del fluido in ingresso e all’uscita dello scambiatore Tu: temperatura del fluido in uscita dalla tubazione adiabatica di lunghezza l Q: flusso termico assorbito dal fluido nello scambiatore

14
C1 C2 S2 S1 G1 G2 Gt Gq Ti wi Q Tu* Tu To + - Controllore+attuatore
Processo sotto controllo, P (+ trasduttori) Tu: variabile controllata (e misurata) (z) Tu*: temperatura di uscita desiderata (z*) Q, Ti: disturbi agenti sul processo (d) wi: variabile di controllo (u) T0: variabile ausiliaria misurata
 Tu: variabile controllata (e misurata) (z) Tu*: temperatura di uscita desiderata (z*) Q, Ti: disturbi agenti sul processo (d) wi: variabile di controllo (u) T0: variabile ausiliaria misurata.")
15
5. COMPONENTI DEI SISTEMI DI CONTROLLO
Componenti base Altri componenti Sistemi di comunicazione fra unità di controllo, sensori e attuatori Interfaccia uomo-macchina per interazione con operatore) Dispositivi di misura (sensori) Unità di elaborazione (controllo) Dispositivi di attuazione (attuatori)
 Dispositivi di misura (sensori) Unità di elaborazione (controllo) Dispositivi di attuazione (attuatori)")
16
a(s) G(s) Dny + a1Dn-1y + …. + any = b0Dnu + b1Dn-1u + … + bnu dky
MODELLI MATEMATICI (LINEARI STAZIONARI) Dny + a1Dn-1y + …. + any = b0Dnu + b1Dn-1u + … + bnu dky Dky := dtk G(s) y u b(s) b0sn + b1sn-1 + … + bn-1s + bn a(s) G(s) = = sn + a1sn-1 + … + an-1s + an s: variabile di Laplace
 Dny + a1Dn-1y + …. + any = b0Dnu + b1Dn-1u + … + bnu. dky. Dky := dtk. G(s) y. u. b(s) b0sn + b1sn-1 + … + bn-1s + bn. a(s) G(s) = = sn + a1sn-1 + … + an-1s + an. s: variabile di Laplace.")
17
CONDENSATORE: i = C dv/dt + - L i
SISTEMI ELETTRICI CIRCUITI R-L-C + OP AMP R i RESISTORE: v = R i INDUTTORE: v = L di/dt CONDENSATORE: i = C dv/dt + - L i - + C i o o + - i2 v v1 o - AMPLIFICATORE IDEALE v1 = v i1 = i2 = 0 o v2 o + i1

18
v = Z(s) i v = R i v = R i v = L di/dt sostituendo d/dt con s v = sL i
SISTEMI ELETTRICI v = R i v = R i v = L di/dt sostituendo d/dt con s v = sL i i = C dv/dt v = i 1 sC v = Z(s) i R RESISTORE sL INDUTTORE 1/sC CONDENSATORE IMPEDENZA GENERALIZZATA Z(s) =
 i. R RESISTORE. sL INDUTTORE. 1/sC CONDENSATORE. IMPEDENZA. GENERALIZZATA. Z(s) =")
19
t = RC (costante di tempo) + + u C y - -
ESEMPI ELETTRICI R y/u = G(s) = 1/(1+ts) t = RC (costante di tempo) + + u C y - - y wn 2 R L = u s2 + 2 d wn s + wn 2 + u C wn 2 = 1/LC , 2 d wn = R/L d : fattore di smorzamento wn : pulsazione naturale
 = 1/(1+ts) t = RC (costante di tempo) + + u. C. y. - - y. wn. 2. R. L. = u. s2 + 2 d wn s + wn u. C. wn. 2. = 1/LC , 2 d wn = R/L. d : fattore di smorzamento. wn : pulsazione naturale.")
20
R2 R1 + + C1 u C2 y - -

21
SISTEMI MECCANICI (DI TRASLAZIONE)
F MASSA F = M dv/dt v = dx /dt MOLLA F = K (x1 - x2) SMORZATORE F = B (v1 - v2) x K F F x1 x2 B F F o o x1 x2
 SMORZATORE F = B (v1 - v2) x. K. F. F. x1. x2. B. F. F. o. o. x1. x2.")
22
ESEMPI MECCANICI (DI TRASLAZIONE)
B M Ingresso: forza u Uscita: velocità y = dx/dt F.d.T.: G(s) = y/u = G = 1/B, t = M/B u x G 1 + ts K u M B Ingresso: forza u Uscita: posizione y = x x G0 wn 2 G(s) = G0 = 1/K, 2dwn = B/M, wn = K/M 2 s2 + 2 d wn s + wn 2
 = y/u = G = 1/B, t = M/B. u. x. G. 1 + ts. K. u. M. B. Ingresso: forza u. Uscita: posizione y = x. x. G0 wn. 2. G(s) = G0 = 1/K, 2dwn = B/M, wn = K/M. 2. s2 + 2 d wn s + wn. 2.")
23
SISTEMI MECCANICI (DI ROTAZIONE)
INERZIA T = J dw/dt w = dq /dt MOLLA T = K (q1 - q2) TORSIONALE SMORZATORE T = B (w1 - w2) J q T K q1 q2 T B o o q1 q2 T
 TORSIONALE. SMORZATORE T = B (w1 - w2) J. q. T. K. q1. q2. T. B. o. o. q1. q2. T.")
24
SISTEMI MECCANICI (DI TRASLAZIONE)
v = Z(s) F x = v/s = [Z(s)/s] F v: velocità, F: forza, x: posizione Z(s) : IMPEDENZA MECCANICA 1/sM MASSA s/K MOLLA 1/B SMORZATORE Z(s) =
 F x = v/s = [Z(s)/s] F. v: velocità, F: forza, x: posizione. Z(s) : IMPEDENZA MECCANICA. 1/sM MASSA. s/K MOLLA. 1/B SMORZATORE. Z(s) =")
25
SISTEMI MECCANICI (DI ROTAZIONE)
w = Z(s) T q = w /s = [Z(s)/s] T w: velocità angolare, T: coppia, q: posizione angolare Z(s) : IMPEDENZA MECCANICA (DI ROTAZIONE) 1/sJ INERZIA s/K MOLLA TORSIONALE 1/B SMORZATORE TORSIONALE Z(s) =
 T q = w /s = [Z(s)/s] T. w: velocità angolare, T: coppia, q: posizione angolare. Z(s) : IMPEDENZA MECCANICA (DI ROTAZIONE) 1/sJ INERZIA. s/K MOLLA TORSIONALE. 1/B SMORZATORE TORSIONALE. Z(s) =")
26
ANALOGIE ELETTRO-MECCANICHE

27
( MODELLO PER IL CONTROLLO DI ARMATURA )
MOTORE IN CONTINUA ( MODELLO PER IL CONTROLLO DI ARMATURA ) Ingresso u = vapp (tensione di armatura) e = vemf ( fem indotta ) i ( corrente di armatura ) T = t ( coppia applicata all’albero motore ) R, L ( resistenza, induttanza, di armatura ) J ( momento d’inerzia albero motore ) B = Kf ( coeff. attrito viscoso )
 Ingresso u = vapp (tensione di armatura) e = vemf ( fem indotta ) i ( corrente di armatura ) T = t ( coppia applicata all’albero motore ) R, L ( resistenza, induttanza, di armatura ) J ( momento d’inerzia albero motore ) B = Kf ( coeff. attrito viscoso )")
28
( MODELLO PER IL CONTROLLO DI ARMATURA )
MOTORE IN CONTINUA ( MODELLO PER IL CONTROLLO DI ARMATURA ) L di/dt + R i = u - e ( eq.ne elettrica ) e = Ke w ( fem indotta ) J dw/dt + B w = T ( eq.ne meccanica ) T = Km i ( coppia indotta ) Ke, Km: costanti del motore
 L di/dt + R i = u - e ( eq.ne elettrica ) e = Ke w ( fem indotta ) J dw/dt + B w = T ( eq.ne meccanica ) T = Km i ( coppia indotta ) Ke, Km: costanti del motore.")
29
( MODELLO PER IL CONTROLLO DI ARMATURA )
MOTORE IN CONTINUA ( MODELLO PER IL CONTROLLO DI ARMATURA ) CONTROLLO DI VELOCITA’ y = w G(s) = y/u = G0 wn 2 s2 + 2 d wn s + wn 2 2dwn=R/L + B/J wn=(KeKm+BR) / LJ G0=Km / (KeKm+BR) 2
 CONTROLLO DI VELOCITA’ y = w G(s) = y/u = G0 wn. 2. s2 + 2 d wn s + wn. 2. 2dwn=R/L + B/J. wn=(KeKm+BR) / LJ. G0=Km / (KeKm+BR) 2.")
30
( MODELLO PER IL CONTROLLO DI ARMATURA )
MOTORE IN CONTINUA ( MODELLO PER IL CONTROLLO DI ARMATURA ) CONTROLLO DI POSIZIONE y = q G(s) = y/u = G0 wn 2 s (s2 + 2 d wn s + wn) 2 2dwn=R/L + B/J wn=(KeKm+BR) / LJ G0=Km / (KeKm+BR) 2
 CONTROLLO DI POSIZIONE. y = q G(s) = y/u = G0 wn. 2. s (s2 + 2 d wn s + wn) 2. 2dwn=R/L + B/J. wn=(KeKm+BR) / LJ. G0=Km / (KeKm+BR) 2.")
31
( MODELLO PER IL CONTROLLO DI ARMATURA )
MOTORE IN CONTINUA ( MODELLO PER IL CONTROLLO DI ARMATURA ) MODELLO SEMPLIFICATO L= w/u = G0 / (1+ts), q/u = G0 / [s (1+ts)] G0 = Km / (BR+KmKe) guadagno in continua t = JR / (BR+ KmKe) costante di tempo
 MODELLO SEMPLIFICATO. L=0 w/u = G0 / (1+ts), q/u = G0 / [s (1+ts)] G0 = Km / (BR+KmKe) guadagno in continua. t = JR / (BR+ KmKe) costante di tempo.")
32
ANALISI NEL TEMPO DI UN SISTEMA LINEARE STAZIONARIO
G(s) y u Problema di analisi della risposta: date condizioni iniziali y(0), Dy(0),…,Dn-1y(0) e l’andamento temporale u(t), 0 £ t, determinare la risposta y(t), 0 £ t . Commento: occorre risolvere l’eq.ne diff.le y(t) = G(D) u(t) rispetto a y(t).
 y. u. Problema di analisi della risposta: date condizioni iniziali y(0), Dy(0),…,Dn-1y(0) e l’andamento temporale u(t), 0 £ t, determinare la risposta y(t), 0 £ t . Commento: occorre risolvere l’eq.ne diff.le. y(t) = G(D) u(t) rispetto a y(t).")
33
SISTEMA DEL PRIMO ORDINE
G(s)=G0/(1+ts) y u Eq.ne diff.le: t dy/dt + y = G0u Condizione iniziale y(0) Ingresso (gradino) u(t) = u se t 0 u(t) = 0 se t < 0 Soluzione (risposta y(t) = ( y(0)-G0u ) e-t/t + G0u al gradino)
=G0/(1+ts) y. u. Eq.ne diff.le: t dy/dt + y = G0u. Condizione iniziale y(0) Ingresso (gradino) u(t) = u se t 0. u(t) = 0 se t < 0. Soluzione (risposta y(t) = ( y(0)-G0u ) e-t/t + G0u. al gradino)")
34
SISTEMA DEL PRIMO ORDINE

35
SISTEMA DEL PRIMO ORDINE
La risposta, partendo dal valore iniziale y(0), tende asintoticamente al valore di regime y() = G0u, dove G0 è il guadagno in continua e u è l’ingresso costante, con una rapidità che dipende dalla costante di tempo t . In particolare, l’uscita è al 95% della sua escursione per un tempo t = 3t.
, tende asintoticamente al valore di regime. y() = G0u, dove G0 è il guadagno in continua e u. è l’ingresso costante, con una rapidità che dipende. dalla costante di tempo t . In particolare, l’uscita è al 95% della sua escursione. per un tempo t = 3t.")
36
SISTEMA DEL SECONDO ORDINE
G(s)=b/(s2 + a1s + a2) y u Eq.ne diff.le: D2y + a1 Dy + a2y = bu Condizioni iniziali y(0), Dy(0) Ingresso (gradino) u(t) = u se t 0 u(t) = 0 se t < 0
=b/(s2 + a1s + a2) y. u. Eq.ne diff.le: D2y + a1 Dy + a2y = bu. Condizioni iniziali y(0), Dy(0) Ingresso (gradino) u(t) = u se t 0. u(t) = 0 se t < 0.")
37
SISTEMA DEL SECONDO ORDINE
G(s)=b/(s2 + a1s + a2) y u Soluzione (risposta) : y(t) = c1 exp(p1t) + c2 exp(p2t) + G0 u G0 = b/ a2 : guadagno in continua p1 , p2 : poli di G(s), soluzioni dell’eq.ne algebrica a(s)= s2 + a1s + a2 = 0 c1 , c2 : dipendono da y(0), Dy(0), u
=b/(s2 + a1s + a2) y. u. Soluzione (risposta) : y(t) = c1 exp(p1t) + c2 exp(p2t) + G0 u. G0 = b/ a2 : guadagno in continua. p1 , p2 : poli di G(s), soluzioni dell’eq.ne algebrica. a(s)= s2 + a1s + a2 = 0. c1 , c2 : dipendono da y(0), Dy(0), u.")
38
SISTEMA DEL SECONDO ORDINE Poli: p = -dwn +/- wn (d2 -1)1/2
a(s)= s2 + 2 d wn s + wn 2 = s2 + a1s + a2 Poli: p = -dwn +/- wn (d2 -1)1/2 Si distinguono tre casi: (1) |d| > 1 : poli reali distinti (2) |d| = 1 : poli reali coincidenti (3) |d| < 1 : poli complessi coniugati Casi (1) e (2): comportamento simile ai sistemi del primo ordine Caso (3): comportamento oscillatorio
= s2 + 2 d wn s + wn. 2. = s2 + a1s + a2. Poli: p = -dwn +/- wn (d2 -1)1/2. Si distinguono tre casi: (1) |d| > 1 : poli reali distinti. (2) |d| = 1 : poli reali coincidenti. (3) |d| < 1 : poli complessi coniugati. Casi (1) e (2): comportamento simile ai sistemi del primo ordine. Caso (3): comportamento oscillatorio.")
39
CASO SOVRASMORZATO: d > 1

40
CASO CRITICAMENTE SMORZATO: d = 1

41
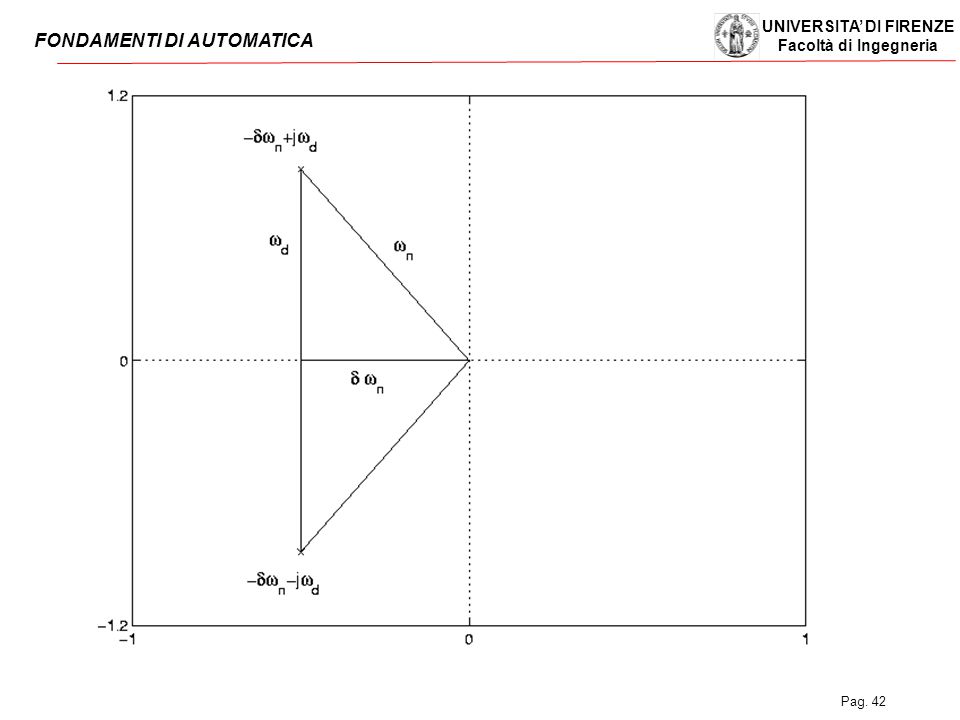
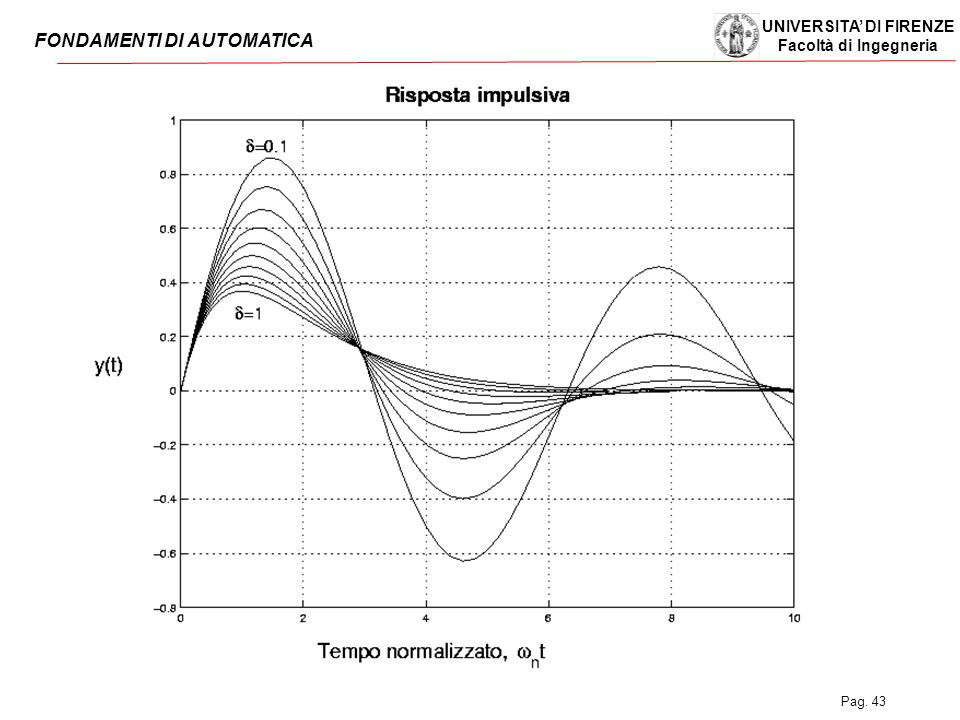
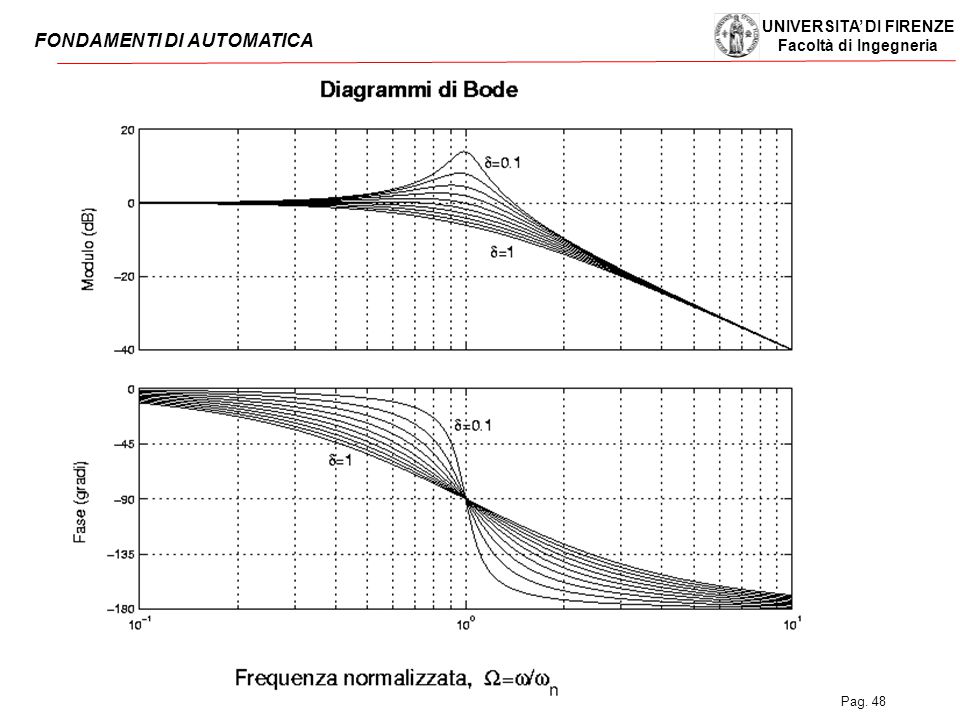
CASO SOTTOSMORZATO: 0 < d < 1
Risposta y(t) = c e-st sen(wt+f) + G0u s = dwn , w = wn 1-d2 , G0 : guadagno dc c, f: dipendono dalle c.i. y(0), Dy(0) e da u La risposta tende al valore di regime G0u con oscillazioni smorzate di pulsazione w
 = c e-st sen(wt+f) + G0u. s = dwn , w = wn 1-d2 , G0 : guadagno dc. c, f: dipendono dalle c.i. y(0), Dy(0) e da u. La risposta tende al valore di regime G0u. con oscillazioni smorzate di pulsazione w.")
44
CASO SOTTOSMORZATO: 0 < d < 1

51
Sistema del 2o ordine con zero negativo

52
Sistema del 2o ordine con zero negativo

53
Sistema del 2o ordine con zero negativo

54
Sistema del 2o ordine con zero positivo
negativo

55
Sistema del 2o ordine con polo aggiuntivo

56
Sistema del 2o ordine con polo aggiuntivo

57
GENERALIZZAZIONE: SISTEMA DI ORDINE n
G(s)=b(s)/a(s) y u Eq.ne diff.le: a(D)y = b(D)u Condizioni iniziali y(0),Dy(0),…,Dn-1y(0) Ingresso (gradino) u(t) = u se t 0 u(t) = 0 se t < 0
=b(s)/a(s) y. u. Eq.ne diff.le: a(D)y = b(D)u. Condizioni iniziali y(0),Dy(0),…,Dn-1y(0) Ingresso (gradino) u(t) = u se t 0. u(t) = 0 se t < 0.")
58
RISPOSTA AL GRADINO DI UN SISTEMA DI ORDINE n
G(s)=b(s)/a(s) y u p1 , p2 , …, pn : poli di G(s), soluzioni dell’eq.ne algebrica a(s)= sn + a1sn-1 +…+ an-1s + an = 0 Per semplicità si assume p1 p2 … pn 0 Risposta y(t) = c1 exp(p1t) + c2 exp(p2t) + … + cn exp(pnt) + G0 u c1 , c2 , …, cn dipendono da y(0), Dy(0),…,Dn-1y(0), u G0 = b(0)/a(0) = bn / an : guadagno in continua
=b(s)/a(s) y. u. p1 , p2 , …, pn : poli di G(s), soluzioni dell’eq.ne algebrica. a(s)= sn + a1sn-1 +…+ an-1s + an = 0. Per semplicità si assume p1 p2 … pn 0. Risposta. y(t) = c1 exp(p1t) + c2 exp(p2t) + … + cn exp(pnt) + G0 u. c1 , c2 , …, cn dipendono da y(0), Dy(0),…,Dn-1y(0), u. G0 = b(0)/a(0) = bn / an : guadagno in continua.")
59
RISPOSTA LIBERA DI UN SISTEMA DI ORDINE n
G(s)=b(s)/a(s) y u=0 Poli di G(s): p1 , p2 , …, pn Per semplicità si assume p1 p2 … pn Risposta y(t) = k1 exp(p1t) + k2 exp(p2t) + … + kn exp(pnt) k1 , k2 , …, kn dipendono da y(0), Dy(0),…,Dn-1y(0)
=b(s)/a(s) y. u=0. Poli di G(s): p1 , p2 , …, pn. Per semplicità si assume p1 p2 … pn. Risposta. y(t) = k1 exp(p1t) + k2 exp(p2t) + … + kn exp(pnt) k1 , k2 , …, kn dipendono da y(0), Dy(0),…,Dn-1y(0)")
60
Il sistema dicesi STABILE se la sua risposta
STABILITA’ G(s)=b(s)/a(s) y u DEFINIZIONE Il sistema dicesi STABILE se la sua risposta libera tende asintoticamente a zero qualunque siano le condizioni iniziali cioè lim y(t) = y(0), Dy(0),…,Dn-1y(0) t
=b(s)/a(s) y. u. DEFINIZIONE. Il sistema dicesi STABILE se la sua risposta. libera tende asintoticamente a zero qualunque. siano le condizioni iniziali cioè. lim y(t) = 0 y(0), Dy(0),…,Dn-1y(0) t")
61
Poiché la risposta libera è
STABILITA’ G(s)=b(s)/a(s) y u Poiché la risposta libera è y(t) = k1 exp(p1t) + k2 exp(p2t) + … + kn exp(pnt) dove k1 , k2 , …, kn possono assumere valori arbitrari al variare di y(0), Dy(0),…,Dn-1y(0) il sistema è stabile se e solo se i poli p1 , p2 , …, pn di G(s) hanno tutti parte reale negativa re(pi) < 0 per i=1,2,…,n
=b(s)/a(s) y. u. Poiché la risposta libera è. y(t) = k1 exp(p1t) + k2 exp(p2t) + … + kn exp(pnt) dove k1 , k2 , …, kn possono assumere valori arbitrari. al variare di y(0), Dy(0),…,Dn-1y(0) il sistema è stabile. se e solo se i poli p1 , p2 , …, pn di G(s) hanno tutti. parte reale negativa. re(pi) < 0 per i=1,2,…,n.")
62
Se il sistema è STABILE, ad un ingresso limitato
STABILITA’ G(s)=b(s)/a(s) y u OSSERVAZIONE Se il sistema è STABILE, ad un ingresso limitato corrisponde sempre un’uscita limitata, cioè il sistema non può mai “esplodere” per effetto di un segnale di ingresso limitato.
=b(s)/a(s) y. u. OSSERVAZIONE. Se il sistema è STABILE, ad un ingresso limitato. corrisponde sempre un’uscita limitata, cioè il. sistema non può mai esplodere per effetto di. un segnale di ingresso limitato.")
63
COME VERIFICARE LA STABILITA’
G(s)=b(s)/a(s) Sistema di ordine 1: a(s)= s + a1 stabile se e solo se a1>0 Sistema di ordine 2: a(s)= s2 + a1s + a2 stabile se e solo se a1>0 e a2>0 Sistema di ordine n: a(s)= sn + a1sn-1 +…+ an stabile solo se a1>0, a2>0, … , an>0; cioè se almeno uno dei coefficienti ai 0 allora il sistema è instabile, viceversa se tutti i coefficienti ai >0 non si può dire che il sistema è stabile; occorre determinare le radici di a(s) y u
=b(s)/a(s) Sistema di ordine 1: a(s)= s + a1. stabile se e solo se a1>0. Sistema di ordine 2: a(s)= s2 + a1s + a2. stabile se e solo se a1>0 e a2>0. Sistema di ordine n: a(s)= sn + a1sn-1 +…+ an. stabile solo se a1>0, a2>0, … , an>0; cioè se almeno. uno dei coefficienti ai 0 allora il sistema è instabile, viceversa se tutti i coefficienti ai >0 non si può dire. che il sistema è stabile; occorre determinare le radici. di a(s) y. u.")
64
VERIFICA DI STABILITA’: CASO n>2
METODO 1: richiede l’uso del calcolatore si determinano radici di a(s) con MATLAB a = [a1, a2, … , an ] roots(a) METODO 2: METODO DI ROUTH-HURWITZ, richiede solo carta e matita
 con MATLAB. a = [a1, a2, … , an ] roots(a) METODO 2: METODO DI ROUTH-HURWITZ, richiede. solo carta e matita.")
65
VERIFICA DI STABILITA’: CASO n>2
Esempio: a(s)= s5 + 2s4 +s3 +s2 + s +1 Verifica con MATLAB a=[ ] roots(a) j j j j0.63 sistema instabile (2 poli con parte reale positiva) sistema oscillatorio: 2 coppie di poli complessi coniugati
= s5 + 2s4 +s3 +s2 + s +1. Verifica con MATLAB. a=[ ] roots(a) j j j j0.63. sistema instabile (2 poli con parte reale positiva) sistema oscillatorio: 2 coppie di poli complessi coniugati.")
66
Esempio: a(s)= s5 + 2s4 +s3 +s2 + s +1
Verifica con ROUTH-HURWITZ s s s / / s s /2 s I coefficienti della colonna 1 non sono tutti positivi sistema instabile

67
Ingresso (armonica) u(t) = A sen(wt+f)
ANALISI ARMONICA (IN FREQUENZA) DI UN SISTEMA LINEARE STAZIONARIO G(s)=b(s)/a(s) y u Ingresso (armonica) u(t) = A sen(wt+f) A, f: ampiezza e fase dell’armonica In forma fasoriale: u(t) = im ( U ejwt ), U = A ejf Si vuole determinare risposta armonica y(t) per arbitrarie condizioni iniziali y(0), Dy(0),…,Dn-1y(0)
 DI UN SISTEMA LINEARE. STAZIONARIO. G(s)=b(s)/a(s) y. u. Ingresso (armonica) u(t) = A sen(wt+f) A, f: ampiezza e fase dell’armonica. In forma fasoriale: u(t) = im ( U ejwt ), U = A ejf. Si vuole determinare risposta armonica y(t) per. arbitrarie condizioni iniziali y(0), Dy(0),…,Dn-1y(0)")
68
TEOREMA DELLA RISPOSTA IN FREQUENZA
ANALISI ARMONICA (IN FREQUENZA) DI UN SISTEMA LINEARE STAZIONARIO G(s)=b(s)/a(s) y u TEOREMA DELLA RISPOSTA IN FREQUENZA La risposta all’ingresso u(t) = im ( U ejwt ) è della forma y(t) = c1exp(p1t)+c2exp(p2t) + … +cnexp(pnt) + im( Y ejwt ) dove c1 , c2 , …, cn dipendono da y(0), Dy(0),…,Dn-1y(0), U Y = G(jw) U
 DI UN SISTEMA LINEARE. STAZIONARIO. G(s)=b(s)/a(s) y. u. TEOREMA DELLA RISPOSTA IN FREQUENZA. La risposta all’ingresso u(t) = im ( U ejwt ) è della forma. y(t) = c1exp(p1t)+c2exp(p2t) + … +cnexp(pnt) + im( Y ejwt ) dove. c1 , c2 , …, cn dipendono da y(0), Dy(0),…,Dn-1y(0), U. Y = G(jw) U.")
69
Risposta a regime permanente
RISPOSTA TRANSITORIA E A REGIME PERMANENTE G(s)=b(s)/a(s) y u(t) = A sen(wt+f) Risposta a regime permanente yrp(t) = im( Y ejwt ) = |G(jw)| A sin(wt+f+G(jw)) è una armonica della stessa pulsazione dell’armonica in ingresso di AMPIEZZA |G(jw)| A FASE G(jw) + f Transitorio yT(t) = c1exp(p1t)+c2exp(p2t) + … +cnexp(pnt)
=b(s)/a(s) y. u(t) = A sen(wt+f) Risposta a regime permanente. yrp(t) = im( Y ejwt ) = |G(jw)| A sin(wt+f+G(jw)) è una armonica della stessa pulsazione dell’armonica. in ingresso di. AMPIEZZA |G(jw)| A. FASE G(jw) + f. Transitorio yT(t) = c1exp(p1t)+c2exp(p2t) + … +cnexp(pnt)")
70
Se il sistema è stabile, il transitorio si esaurisce
RISPOSTA TRANSITORIA E A REGIME PERMANENTE G(s)=b(s)/a(s) y u(t) = A sen(wt+f) OSSERVAZIONE Se il sistema è stabile, il transitorio si esaurisce asintoticamente cioè dopo un tempo sufficientemente lungo; rimane quindi la sola risposta a regime.
=b(s)/a(s) y. u(t) = A sen(wt+f) OSSERVAZIONE. Se il sistema è stabile, il transitorio si esaurisce. asintoticamente cioè dopo un tempo sufficientemente. lungo; rimane quindi la sola risposta a regime.")
71
G(jw), cioè G(s) valutata per s=jw, prende il nome di
RISPOSTA IN FREQUENZA G(s) u y G(jw), cioè G(s) valutata per s=jw, prende il nome di RISPOSTA IN FREQUENZA Nota che per ogni pulsazione w, G(jw) è un numero complesso il cui modulo |G(jw)| rappresenta il guadagno del sistema alla pulsazione w e il cui argomento (fase) G(jw) rappresenta lo sfasamento del sistema alla pulsazione w.
 u. y. G(jw), cioè G(s) valutata per s=jw, prende il nome di. RISPOSTA IN FREQUENZA. Nota che per ogni pulsazione w, G(jw) è un numero. complesso il cui modulo |G(jw)| rappresenta il guadagno. del sistema alla pulsazione w e il cui argomento (fase) G(jw) rappresenta lo sfasamento del sistema alla. pulsazione w.")
72
MISURA DELLA RISPOSTA IN FREQUENZA
Fissato w si applica al sistema un ingresso armonico u di pulsazione w, di ampiezza A e fase f note. Si attende che il sistema vada a regime e si misurano ampiezza A’ e fase f’ dell’uscita y. Allora |G(jw)| = A’ / A (ampiezza uscita / ampiezza ingresso) G(jw) = f’ - f (fase uscita - fase ingresso) Si ripete l’esperimento per vari valori di w
| = A’ / A (ampiezza uscita / ampiezza ingresso) G(jw) = f’ - f (fase uscita - fase ingresso) Si ripete l’esperimento per vari valori di w.")
73
PROPRIETA’ RISPOSTA IN FREQUENZA G(jw)|= |G(jw)| exp(j G(jw) )
= re G(jw) + j im G(jw) |G(jw)| = |G(-jw)| G(jw) = - G(-jw) re G(jw) = re G(-jw) im G(jw) = - im G(-jw)
 + j im G(jw) |G(jw)| = |G(-jw)| G(jw) = - G(-jw) re G(jw) = re G(-jw) im G(jw) = - im G(-jw)")
74
RAPPRESENTAZIONI DELLA RISPOSTA IN FREQUENZA
DIAGRAMMI DI BODE (CARTESIANI): diagramma delle ampiezze: |G(jw)|, in decibel, in funzione di w diagramma delle fasi G(jw) , in gradi, in funzione di w su scala logaritmica per w DIAGRAMMA DI NYQUIST (POLARE): Curva descritta da G(jw) al variare di w
: diagramma delle ampiezze: |G(jw)|, in decibel, in funzione di w. diagramma delle fasi. G(jw) , in gradi, in funzione di w. su scala logaritmica per w. DIAGRAMMA DI NYQUIST (POLARE): Curva descritta da G(jw) al variare di w.")
75
G(s) = 1 / (1+ts)
 = 1 / (1+ts)")
77
DIAGRAMMI DI BODE DI G(s) = G0
AMPIEZZA : Retta orizzontale a 20 log10|G0|dB FASE : Retta orizzontale a O° se G0 >0, a -180° se G0 <0 VALORI IN dB |G0| |G0|dB 1/

78
DIAGRAMMI DI BODE DI G(s) = 1/s
AMPIEZZA : Retta con pendenza di -20 dB per decade che attraversa 0 dB alla pulsazione w=1 FASE : Retta orizzontale a -90° ALCUNI VALORI w |G(w)|, in dB
|, in dB")
79
DIAGRAMMI DI BODE DI G(s) GENERICA
OSSERVAZIONI (1) Se G(s) = G1(s) G2(s) G3(s) i diagrammi di Bode di G(s) sono ottenuti sommando i diagrammi di G1(s), G2(s), G3(s) ….. Poiché | G1 G2 G3 | dB = |G1| dB + |G2| dB + |G3| dB + G1 G2 G3 = G1 + G2 + G3 + (2) I diagrammi di Bode di 1/G(s) sono ottenuti ribaltando rispetto all’asse delle ascisse i diagrammi di G(s) poiché |1/G|dB = - |G| dB 1/G = - G (3) Il diagramma di ampiezza di G’(s)=1/(1-ts) è uguale a quello di G(s)= 1/(1+ts); il diagramma di fase di G’(s) è ottenuto ribaltando rispetto all’asse delle ascisse quello di G(s). (4) Come al punto (3) vale per i diagrammi di G(s)=wn/(s2+2dw s+w2n) G(s)=wn / (s2-2dw s+wn) 2 2 2
 Se G(s) = G1(s) G2(s) G3(s) i diagrammi di Bode di G(s) sono. ottenuti sommando i diagrammi di G1(s), G2(s), G3(s) ….. Poiché. | G1 G2 G3 | dB = |G1| dB + |G2| dB + |G3| dB + G1 G2 G3 = G1 + G2 + G3 + (2) I diagrammi di Bode di 1/G(s) sono ottenuti ribaltando rispetto. all’asse delle ascisse i diagrammi di G(s) poiché. |1/G|dB = - |G| dB 1/G = - G. (3) Il diagramma di ampiezza di G’(s)=1/(1-ts) è uguale a quello di. G(s)= 1/(1+ts); il diagramma di fase di G’(s) è ottenuto ribaltando. rispetto all’asse delle ascisse quello di G(s). (4) Come al punto (3) vale per i diagrammi di G(s)=wn/(s2+2dw s+w2n) G(s)=wn / (s2-2dw s+wn)")
80
DIAGRAMMI DI BODE DI G(s) GENERICA
Una generica f.d.t. G(s) può essere espressa come prodotto di f.d.t. dei quattro tipi già esaminati vale a dire G(s) = G1(s) G2(s) G3(s) dove Gi(s) può essere dei seguenti tipi (già esaminati) Gi(s) = G0 Gi(s) =1/s Gi(s) =1/(1+ts) o Gi(s) = 1+ts Gi(s) = 1/[1+2d(s/wn)+(s/wn)2] o Gi(s)=[1+2d(s/wn)+(s/wn)2] 2
 può essere espressa come. prodotto di f.d.t. dei quattro tipi già esaminati vale. a dire. G(s) = G1(s) G2(s) G3(s) dove Gi(s) può essere dei seguenti tipi (già esaminati) Gi(s) = G0. Gi(s) =1/s. Gi(s) =1/(1+ts) o Gi(s) = 1+ts. Gi(s) = 1/[1+2d(s/wn)+(s/wn)2] o Gi(s)=[1+2d(s/wn)+(s/wn)2] 2.")
81
DIAGRAMMI DI BODE DI G(s) GENERICA
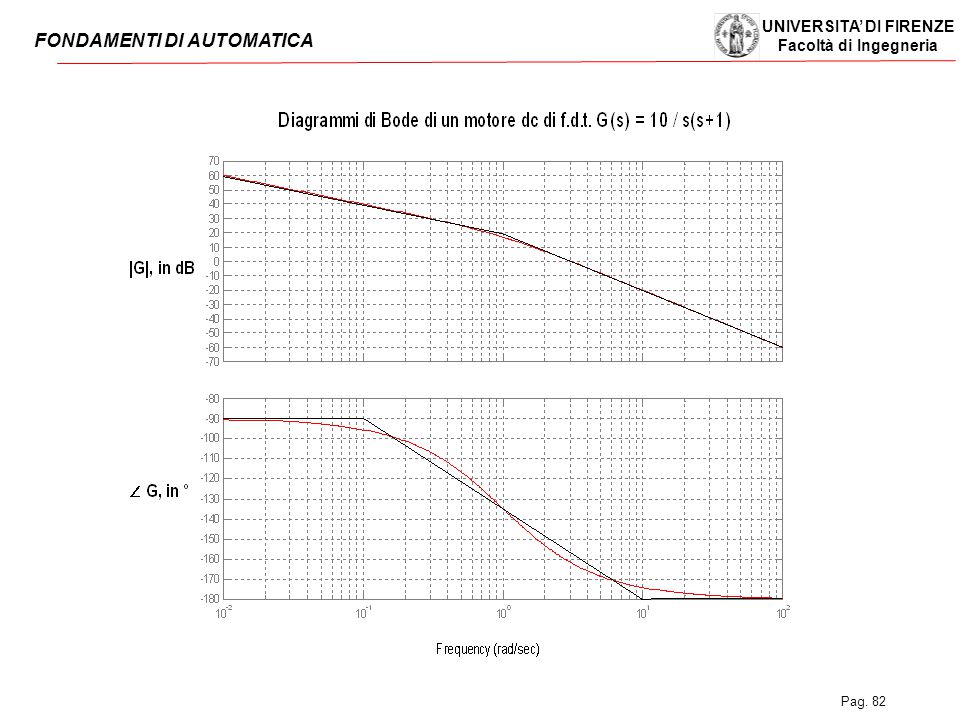
ESEMPIO: Modello semplificato per il controllo di posizione dell’albero di un motore dc G(s) = G0 / s (1+ts) G0 = 10, t = 1 Si ha G(s) = G1(s) G2(s) G3(s) con G1(s) = 10 , G2(s)=1/s , G3(s)=1/(s+1)
 = G0 / s (1+ts) G0 = 10, t = 1. Si ha. G(s) = G1(s) G2(s) G3(s) con. G1(s) = 10 , G2(s)=1/s , G3(s)=1/(s+1)")
83
CONNESSIONE IN SERIE (IN CASCATA)
G1(s) G2(s) y=y2 u=u1 y1=u2 y = G2(s) G1(s) u = G(s) u F.d.T. del sistema serie G(s) = prodotto delle f.d.t. dei sottosistemi G1(s) e G2(s)
 G2(s) y=y2. u=u1. y1=u2. y = G2(s) G1(s) u = G(s) u. F.d.T. del sistema serie G(s) = prodotto. delle f.d.t. dei sottosistemi G1(s) e G2(s)")
84
CONNESSIONE IN PARALLELO
y1 u1 G1(s) y= y1 +y2 u + u2 G2(s) y2 y = [ G1(s) + G2(s) ] u = G(s) u F.d.T. del sistema parallelo G(s) = somma delle f.d.t. dei sottosistemi G1(s) e G2(s)
 y= y1 +y2. u. + u2. G2(s) y2. y = [ G1(s) + G2(s) ] u = G(s) u. F.d.T. del sistema parallelo G(s) = somma. delle f.d.t. dei sottosistemi G1(s) e G2(s)")
85
CONNESSIONE IN RETROAZIONE
u u1 y1=y G1(s) + y2 G2(s) u2 y = G1 [u + G2y ] = G1u + G1G2y y = G1 / (1-G1 G2) u = G u G(s) = G1(s) / [1- G1(s) G2(s)] F.d.T. del sistema parallelo G(s) = f.d.t. del ramo diretto diviso per (1-f.d.t. d’anello)
 + y2. G2(s) u2. y = G1 [u + G2y ] = G1u + G1G2y. y = G1 / (1-G1 G2) u = G u. G(s) = G1(s) / [1- G1(s) G2(s)] F.d.T. del sistema parallelo G(s) = f.d.t. del ramo. diretto diviso per (1-f.d.t. d’anello)")
86
SISTEMA DI CONTROLLO A RETROAZIONE
+ r e C(s) u G(s) y _ Il sistema deve essere INTERNAMENTE STABILE nel senso che se gli ingressi r e d sono limitati, tutte le variabili interne del sistema (e, u e di conseguenza tutte le altre) devono rimanere limitate La stabilità interna deve impedire che il sistema “esploda” per effetto di ingressi limitati ed è quindi un requisito necessario di un sistema di controllo
 u. G(s) y. _. Il sistema deve essere INTERNAMENTE STABILE. nel senso che se gli ingressi r e d sono limitati, tutte le variabili interne del sistema (e, u e di. conseguenza tutte le altre) devono rimanere limitate. La stabilità interna deve impedire che il sistema. esploda per effetto di ingressi limitati ed è quindi. un requisito necessario di un sistema di controllo.")
87
del processo P G(s)=b(s)/a(s) del controllore C C(s)=q(s)/p(s)
STABILITA’ INTERNA d + r e C(s) u G(s) y _ F.d.t.: del processo P G(s)=b(s)/a(s) del controllore C C(s)=q(s)/p(s) d’anello L(s)=C(s)G(s)=b(s)q(s) / a(s)p(s) da r a e: /(1+L(s)) = a(s)p(s) / c(s) da r a u: C(s)/(1+L(s)) = a(s)q(s) / c(s) da d a e: G(s)/(1+L(s)) = -b(s)p(s) / c(s) da d a u: /(1+L(s)) = a(s)p(s) / c(s) c(s) = a(s) p(s) + b(s) q(s) : polinomio caratteristico
 u. G(s) y. _. F.d.t.: del processo P G(s)=b(s)/a(s) del controllore C C(s)=q(s)/p(s) d’anello L(s)=C(s)G(s)=b(s)q(s) / a(s)p(s) da r a e: 1/(1+L(s)) = a(s)p(s) / c(s) da r a u: C(s)/(1+L(s)) = a(s)q(s) / c(s) da d a e: -G(s)/(1+L(s)) = -b(s)p(s) / c(s) da d a u: 1/(1+L(s)) = a(s)p(s) / c(s) c(s) = a(s) p(s) + b(s) q(s) : polinomio caratteristico.")
88
Il sistema a retroazione in figura è internamente stabile
STABILITA’ INTERNA d + r e C(s) u G(s) y _ Il sistema a retroazione in figura è internamente stabile se e solo se il polinomio caratteristico c(s)=a(s)p(s)+b(s)q(s) ha tutte le radici con parte reale negativa.
 u. G(s) y. _. Il sistema a retroazione in figura è internamente stabile. se e solo se il polinomio caratteristico. c(s)=a(s)p(s)+b(s)q(s) ha tutte le radici con parte reale negativa.")
89
C(s)=q(s)/p(s) G(s)=b(s)/a(s) CRITERIO DI NYQUIST C(s) G(s)
+ r e C(s) u G(s) y _ Si indichi con L(s)=C(s)G(s) la f.d.t. d’anello del sistema in figura c(s)=a(s)p(s)+b(s)q(s) il pol. caratteristico Pa = no. di poli di L(s) con parte reale positiva Pc = no. di radici di c(s) con parte reale positiva N = no. di giri del diagramma di Nyquist di L(jw), in senso orario, intorno al punto critico -1+j0 Vale la relazione N = Pc - Pa Stabilità interna Pc = 0 N = -Pa
 u. G(s) y. _. Si indichi con. L(s)=C(s)G(s) la f.d.t. d’anello del sistema in figura. c(s)=a(s)p(s)+b(s)q(s) il pol. caratteristico. Pa = no. di poli di L(s) con parte reale positiva. Pc = no. di radici di c(s) con parte reale positiva. N = no. di giri del diagramma di Nyquist di L(jw), in senso orario, intorno al punto critico -1+j0. Vale la relazione. N = Pc - Pa. Stabilità interna Pc = 0 N = -Pa.")
90
Il sistema in figura è internamente stabile
CRITERIO DI NYQUIST d + r e C(s) u G(s) y _ Il sistema in figura è internamente stabile se e solo se il diagramma di Nyquist di L(s) = C(s) G(s) non passa per il punto critico -1+j0 e compie intorno ad esso un numero di giri in senso antiorario pari al numero di poli di L(s) con parte reale positiva
 u. G(s) y. _. Il sistema in figura è internamente stabile. se e solo se il diagramma di Nyquist di. L(s) = C(s) G(s) non passa per il punto critico. -1+j0 e compie intorno ad esso un numero. di giri in senso antiorario pari al numero di poli di. L(s) con parte reale positiva.")
91
COROLLARIO DEL CRITERIO DI NYQUIST
+ r e C(s) u G(s) y _ Assumendo che L(s)=C(s)G(s) non ha poli con parte reale positiva, il sistema in figura è internamente stabile se e solo se il diagramma di Nyquist di L(s) non passa per il punto critico -1+j0 e non lo contiene al suo interno.
 u. G(s) y. _. Assumendo che L(s)=C(s)G(s) non ha poli con parte. reale positiva, il sistema in figura è internamente stabile. se e solo se il diagramma di Nyquist di L(s) non passa per il punto critico -1+j0 e non lo contiene. al suo interno.")
92
MARGINI DI STABILITA’

93
Pulsazione di attraversamento a 0 dB: wf : | G(j wf) | = 1 (0 dB)
MARGINI DI STABILITA’ Pulsazione di attraversamento a 0 dB: wf : | G(j wf) | = 1 (0 dB) Margine di fase: mf = 180° + G(j wf) Pulsazione di attraversamento a -180°: wg : G(j wg) = ° Margine di guadagno: mg = 1 / |G(j wg)| (mg)dB = - 20 log10 |G(j wg)|
 | = 1 (0 dB) Margine di fase: mf = 180° + G(j wf) Pulsazione di attraversamento a -180°: wg : G(j wg) = - 180° Margine di guadagno: mg = 1 / |G(j wg)| (mg)dB = - 20 log10 |G(j wg)|")
94
(1) I margini di fase e di guadagno misurano
MARGINI DI STABILITA’ OSSERVAZIONI: (1) I margini di fase e di guadagno misurano la distanza dall’instabilità del sistema; tanto più grandi sono mf e mg tanto più il sistema è “sicuro”, lontano dall’instabilità. (2) Valori indicativi per un progetto soddisfacen- te dell’anello di controllo sono: mf = 40° 60° mg = 4 6 ( 12 16 dB )
 I margini di fase e di guadagno misurano. la distanza dall’instabilità del sistema; tanto. più grandi sono mf e mg tanto più il sistema. è sicuro , lontano dall’instabilità. (2) Valori indicativi per un progetto soddisfacen- te dell’anello di controllo sono: mf = 40° 60° mg = 4 6 ( 12 16 dB )")
95
- la f.d.t. d’anello L(s) non ha poli con parte reale positiva
CRITERIO DI BODE Se si assume che - la f.d.t. d’anello L(s) non ha poli con parte reale positiva - il diagramma di Bode di |L(jw)| attraversa alpiù una volta gli 0 dB allora il sistema è internamente stabile se e solo se mf > 0° e KB > 0
 non ha poli con parte. reale positiva. - il diagramma di Bode di |L(jw)| attraversa. alpiù una volta gli 0 dB. allora il sistema è internamente stabile se. e solo se. mf > 0° e KB > 0.")
96
SPECIFICHE DI UN SISTEMA DI CONTROLLO
+ r e C(s) u G(s) y _ (1) STABILITA’: L’anello di controllo deve essere internamente stabile (2) PRECISIONE: Il segnale errore e deve essere “piccolo” A REGIME (PRECISIONE STATICA) ed IN TRANSITORIO (PRECISIONE DINA_ MICA) (3) ROBUSTEZZA: Le specifiche di stabilità e precisione devono essere soddisfatte a fronte di incertezze di modello e disturbi
 u. G(s) y. _. (1) STABILITA’: L’anello di controllo deve essere internamente. stabile. (2) PRECISIONE: Il segnale errore e deve essere piccolo A REGIME. (PRECISIONE STATICA) ed IN TRANSITORIO (PRECISIONE DINA_. MICA) (3) ROBUSTEZZA: Le specifiche di stabilità e precisione devono. essere soddisfatte a fronte di incertezze di modello e disturbi.")
97
PRECISIONE STATICA (A REGIME)
y r e L(s)=C(s)G(s) + - Per misurare la precisione a regime del sistema si definiscono gli errori ek : errore a regime se il segnale di riferimento è r(t) = tk / k! per k=0,1,2, …… e0 : errore a regime al gradino, o anche errore di posizione e1 : l’errore a regime alla rampa, o anche errore di velocità e2 : l’errore a regime alla parabola, o anche errore di accelerazione
=C(s)G(s) + - Per misurare la precisione a regime del sistema si definiscono gli. errori. ek : errore a regime se il segnale di riferimento è r(t) = tk / k! per k=0,1,2, …… e0 : errore a regime al gradino, o anche errore di posizione. e1 : l’errore a regime alla rampa, o anche errore di velocità. e2 : l’errore a regime alla parabola, o anche errore di accelerazione.")
98
Come dipendono gli errori a regime ek dalle
caratteristiche dell’anello di controllo ? Conviene scomporre la f.d.t. d’anello L(s) come L(s) = K L’(s) / sh dove L’(s) ha guadagno in continua unitario: L(0)=1 K è il guadagno d’anello h è il numero di poli di L(s) in s=0
 come. L(s) = K L’(s) / sh. dove. L’(s) ha guadagno in continua unitario: L(0)=1. K è il guadagno d’anello. h è il numero di poli di L(s) in s=0.")
99
La precisione statica dipende solo da h e K Precisamente:
ERRORI A REGIME Ke r e KL’(s) 1/sh La precisione statica dipende solo da h e K Precisamente: e0 = e1 = = eh-1 = 0 eh = 1/(1+K) se h=0, eh = 1/K se h>0 eh+1= eh+2 = =
 1/sh. La precisione statica dipende solo da h e K. Precisamente: e0 = e1 = = eh-1 = 0. eh = 1/(1+K) se h=0, eh = 1/K se h>0. eh+1= eh+2 = = ")
100
Il sistema in fig. in cui il n° di integratori
PRECISIONE A REGIME r e Ke KL’(s) 1/sh Il sistema in fig. in cui il n° di integratori presenti nell’anello è uguale a h, dicesi di tipo h Per un sistema di tipo h, l’errore eh è finito ma non nullo gli errori ei, i<h, sono nulli gli errori ei, i>h, sono infiniti
 1/sh. Il sistema in fig. in cui il n° di integratori. presenti nell’anello è uguale a h, dicesi di tipo h. Per un sistema di tipo h, l’errore eh è finito ma non nullo. gli errori ei, i<h, sono nulli. gli errori ei, i>h, sono infiniti.")
101
Specifiche di precisione statica -errore a regime al gradino nullo
PRECISIONE A REGIME ESEMPIO Specifiche di precisione statica -errore a regime al gradino nullo -errore a regime alla rampa non superiore all’1% L’anello di controllo deve avere - h=1 integratore - K 100

102
PRECISIONE DINAMICA (IN TRANSITORIO)
Le specifiche di precisione dinamica (comportamento in transitorio) possono essere espresse in diversi modi (1) SPECIFICHE NEL DOMINIO DEL TEMPO sulla risposta al gradino dal segnale di riferimento r all’uscita y : sovraelongazione, tem- po di salita, tempo di assestamento (2) SPECIFICHE NEL DOMINIO DELLA FREQUENZA AD ANELLO CHIUSO sulla risposta in frequenza da r a y : picco di risonanza, banda passante a -3dB. (3) SPECIFICHE NEL DOMINIO DELLA FREQUENZA AD ANELLO APERTO sulla risposta in frequenza della f.d.t. d’anello L(jw): margini di fase e di guadagno e relative pulsazioni di attraversamento
 possono essere espresse in diversi modi. (1) SPECIFICHE NEL DOMINIO DEL TEMPO sulla risposta al gradino. dal segnale di riferimento r all’uscita y : sovraelongazione, tem- po di salita, tempo di assestamento. (2) SPECIFICHE NEL DOMINIO DELLA FREQUENZA AD ANELLO. CHIUSO sulla risposta in frequenza da r a y : picco di risonanza, banda passante a -3dB. (3) SPECIFICHE NEL DOMINIO DELLA FREQUENZA AD ANELLO. APERTO sulla risposta in frequenza della f.d.t. d’anello L(jw): margini di fase e di guadagno e relative pulsazioni di. attraversamento.")
103
SPECIFICHE NEL DOMINIO DEL TEMPO

104
SPECIFICHE NEL DOMINIO DEL TEMPO
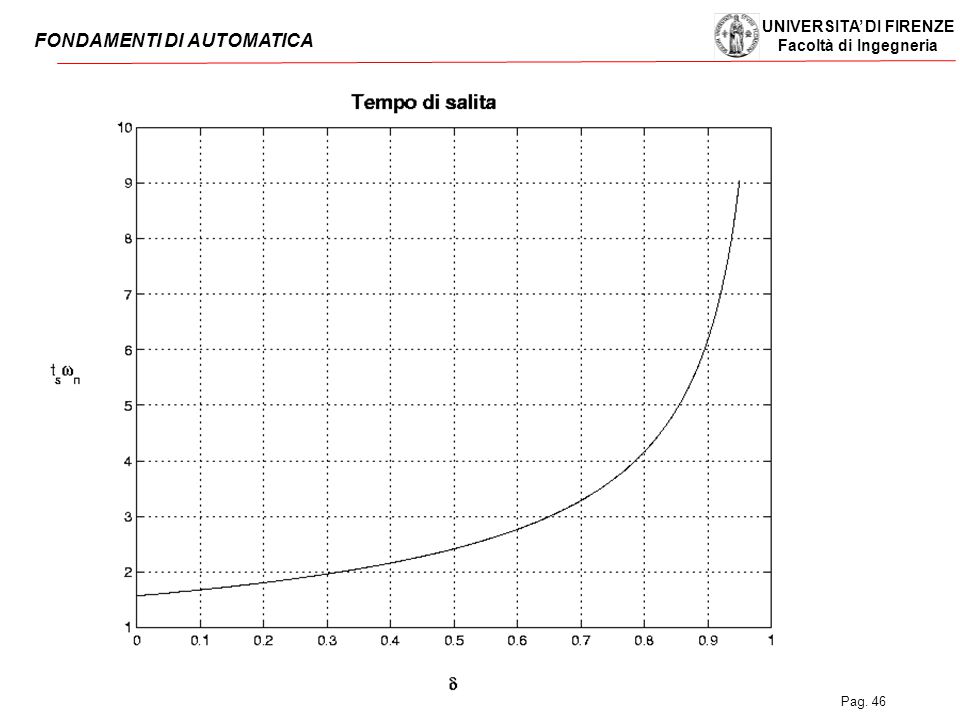
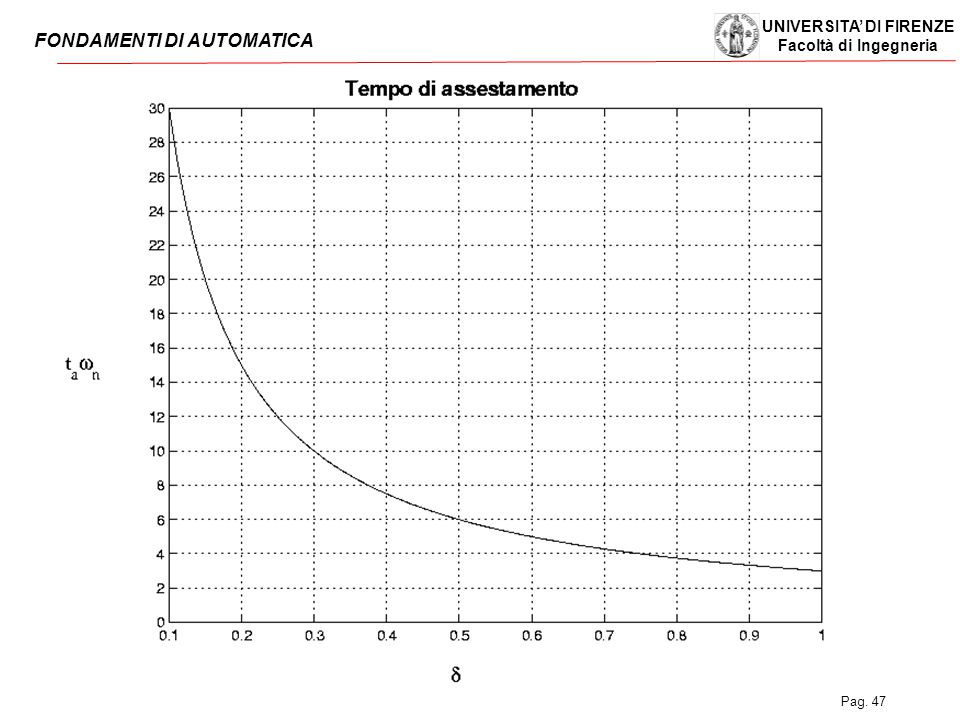
Tempo di salita ts: tempo necessario affinchè l’uscita raggiunga per la prima volta il valore di regime se il transitorio è oscillatorio, oppure tempo richiesto per raggiungere il 90% del valore di regime se il transitorio non è oscillatorio. Tempo di assestamento ta: tempo necessario dopo il quale l’errore di inseguimento si mantiene entro il 5% del valore di regime Sovraelongazione S : valore, in %, di superamento del valore di regime

105
SPECIFICHE NEL DOMINIO DELLA FREQUENZA

106
PICCO DI RISONANZA E BANDA PASSANTE
+ r e C(s) u G(s) y _ F.d.T. d’anello: L(s) = C(s) G(s) F.d.T. da r a y: T(s) = L(s)/(1+L(s)) Risposta in frequenza da r a y: T(jw) Picco di risonanza Mr: valore in dB del picco di ampiezza della risposta in frequenza da r a y; valori tipici di un buon progetto Mr : 1 4 dB Banda passante (a -3dB) wB : valore della pulsazione alla quale il guadagno si riduce a -3dB
 u. G(s) y. _. F.d.T. d’anello: L(s) = C(s) G(s) F.d.T. da r a y: T(s) = L(s)/(1+L(s)) Risposta in frequenza da r a y: T(jw) Picco di risonanza Mr: valore in dB del picco di ampiezza. della risposta in frequenza da r a y; valori tipici di un buon progetto Mr : 1 4 dB. Banda passante (a -3dB) wB : valore della pulsazione alla quale il. guadagno si riduce a -3dB.")
107
SPECIFICHE NEL DOMINIO DELLA FREQUENZA
SU L(jw)
")
108
CONVERSIONE DI SPECIFICHE
Per la sintesi conviene tradurre le specifiche in specifiche equivalenti su mf e wf . Formule empiriche per la conversione wB ts 3 (1+S) / Mr 0.85 1 wf / wB 0.5 0.8 mf arccos( / Mr ) 2
 / Mr 0.85 1. wf / wB 0.5 0.8. mf arccos( / Mr ) 2.")
109
SINTESI PER TENTATIVI (1) COMPENSAZIONE STATICA: Si determinano il numero c di poli in s=0 del controllore C(s) ed eventualmente un guadagno Kc in modo da soddisfare le specifiche di precisione statica. (2) CONVERSIONE SPECIFICHE: Si convertono, tramite le formule approssimate, le specifiche di precisione dinamica in specifiche equivalenti su mf e wf . (3) COMPENSAZIONE DINAMICA: Si progetta una rete correttrice C’(s) in modo da conseguire i valori di mf e wf impostati. (4) VERIFICA: Si verifica se il controllore C(s)= Kc C’(s) / sc soddisfa le specifiche e in tal caso si arresta il procedimento. Altrimenti si modificano i valori impostati di mf e wf e si ritorna al passo (3).
 CONVERSIONE SPECIFICHE: Si convertono, tramite le formule. approssimate, le specifiche di precisione dinamica in specifiche. equivalenti su mf e wf . (3) COMPENSAZIONE DINAMICA: Si progetta una rete correttrice. C’(s) in modo da conseguire i valori di mf e wf impostati. (4) VERIFICA: Si verifica se il controllore C(s)= Kc C’(s) / sc soddisfa. le specifiche e in tal caso si arresta il procedimento. Altrimenti. si modificano i valori impostati di mf e wf e si ritorna al passo. (3).")
110
Si consideri la f.d.t. con un polo ed uno zero
RETI CORRETTRICI Si consideri la f.d.t. con un polo ed uno zero C(s) = (1+ss) / (1+ts) s,t > 0 Se la pulsazione di rottura del polo precede quella dello zero, cioè s < t, allora C(s) introduce ATTENUAZIONE e ritardo. Viceversa, se s > t, allora C(s) introduce ANTICIPO e amplificazione.
 = (1+ss) / (1+ts) s,t > 0. Se la pulsazione di rottura del polo precede. quella dello zero, cioè s < t, allora C(s) introduce ATTENUAZIONE e ritardo. Viceversa, se s > t, allora C(s) introduce. ANTICIPO e amplificazione.")
111
1+ts 1+(t/m)s 1+(t/m)s 1+ts
RETI CORRETTRICI Rete Anticipatrice: Cant(s) = t > 0 m>1 1+ts 1+(t/m)s Rete Attenuatrice: Catt(s) = t > 0 m>1 1+(t/m)s 1+ts
 = t > 0 m>1. 1+ts. 1+(t/m)s. Rete Attenuatrice: Catt(s) = t > 0 m>1. 1+(t/m)s. 1+ts.")
112
DIAGRAMMI DI BODE DELE RETI CORRETTRICI

113
COMPENSAZIONE DINAMICA - CASO 1

114
COMPENSAZIONE DINAMICA - CASO 2

115
COMPENSAZIONE DINAMICA - CASO 3

116
COMPENSAZIONE DINAMICA - CASO 4

117
REALIZZAZIONE CIRCUITALE DELLE RETI CORRETTRICI
Rete attenuatrice: t = C(R1+R2 ) m= 1 + R1/R2 R1 C y u R2 Rete anticipatrice: t = R1C m= 1 + R1/R2 R1 u C m R2 y
 m= 1 + R1/R2. R1. C. y. u. R2. Rete anticipatrice: t = R1C. m= 1 + R1/R2. R1. u. C. m. R2. y.")
118
F.d.T. del sistema da controllare G(s) = 1 / s(s+1) Specifiche:
ESEMPIO DI SINTESI F.d.T. del sistema da controllare G(s) = 1 / s(s+1) Specifiche: (1) errore a regime nullo al gradino e1= 0 (2) errore a regime alla rampa e1 1% (3) sovraelongazione S 20% (4) tempo di salita ts 0.5 sec
 = 1 / s(s+1) Specifiche: (1) errore a regime nullo al gradino e1= 0. (2) errore a regime alla rampa e1 1% (3) sovraelongazione S 20% (4) tempo di salita ts 0.5 sec.")
119
Il sistema non soddisfa specifica (2) ESEMPIO DI SINTESI C(s)=1 G(s) +
r e C(s)=1 u G(s) y _ Il sistema non soddisfa specifica (2)
=1. u. G(s) y. _. Il sistema non. soddisfa specifica. (2)")
120
COMPENSAZIONE STATICA
r + y e 100 u G(s) Per soddisfare (2) si sceglie Kc=100. Il sistema non soddisfa (3): S>80% _
 Per soddisfare (2) si sceglie Kc=100. Il sistema non. soddisfa (3): S>80% _.")
121
CONVERSIONE SPECIFICHE DINAMICHE
Usando le formula empiriche si trovano valori di primo tentativo per mf e wf : ts=0.5 sec wf = 2 / ts = 4 rad/sec S = mf = 50°

122
COMPENSAZIONE DINAMICA

123
COMPENSAZIONE DINAMICA
Alla pulsazione wf = 4 rad/sec occorre - un anticipo di circa 35° 40° - un’attenuazione di circa 15 16 dB Si possono usare - rete anticipatrice con m=8 e w=wft =1.5 - rete attenuatrice con m=10 e w=wft =200

124
COMPENSAZIONE DINAMICA
Il compensatore risultante è C(s) = 100 guadagno anticipatrice attenuatrice 1+ 3/8 s 1 + 5s 1 + 3/64 s s
 = 100. guadagno anticipatrice attenuatrice. 1+ 3/8 s s /64 s s.")
125
VERIFICA PROGETTO: DIAGRAMMI DI BODE DI L(jw)
")
126
VERIFICA PROGETTO: RISPOSTA AL GRADINO DI y

127
VERIFICA: TEMPO DI ASSESTAMENTO

128
VERIFICA PROGETTO: RISPOSTA ALLA RAMPA

129
VERIFICA PROGETTO: DIAGRAMMA DI AMPIEZZA DI T(jw)
")
130
VERIFICA PROGETTO: INGRESSO DELL’ATTUATORE

131
CONTROLLORI INDUSTRIALI STANDARD
+ + + z* e Regolatore u Processo z _ + + n Controllo a relay Il controllo a relay è usato diffusamente negli elettrodomestici e in semplici sistemi di controllo di temperatura, industriali e per edifici. e u e u Le variabili di un sistema di controllo a relay tendono ad esibire un comportamento periodico, che va studiato con attenzione per garantire che l’ampiezza e il periodo di tali oscillazioni siano compatibili con le specifiche del problema di controllo.

132
Regolatori industriali standard
P : regolatore proporzionale I : regolatore integrale PI : regolatore proporzionale-integrale PD : regolatore proporzionale-derivativo PID: regolatore proporzionale-integrale-derivativo e u Regolatore Funzioni di trasferimento U(s)/E(s) P : C(s)= Kp I : C(s)= Kp/sTi PI : C(s)= Kp(1 + 1/sTi) PD : C(s)= Kp(1 + sTd) PID: C(s)= Kp(1 + sTd + 1/sTi) Azioni di controllo P : u(t) = Kp e(t) I : u(t) =(Kp/Ti) PI : u(t) = Kp e(t)+(1/Ti) PD : u(t) = Kp e(t)+Td PID: u(t) = Kp e(t)+Td (1/Ti) Kp = guadagno proporzionale; Ti = costante di tempo integrale; Td = costante di tempo derivativa
/E(s) P : C(s)= Kp. I : C(s)= Kp/sTi. PI : C(s)= Kp(1 + 1/sTi) PD : C(s)= Kp(1 + sTd) PID: C(s)= Kp(1 + sTd + 1/sTi) Azioni di controllo. P : u(t) = Kp e(t) I : u(t) =(Kp/Ti) PI : u(t) = Kp e(t)+(1/Ti) PD : u(t) = Kp e(t)+Td PID: u(t) = Kp e(t)+Td +(1/Ti) Kp = guadagno proporzionale; Ti = costante di tempo integrale; Td = costante di tempo derivativa.")
133
e P, I, PI,PD,PID u Note sulle proprietà dei regolatori industriali azione proporzionale Il comando u(t) è proporzionale all’errore e(t). L’errore di regolazione in genere non si annulla all’infinito, ma risulta comunque inversamente proporzionale alla costante di proporzionalità K. D’altra parte l’aumento del guadagno K tende a far peggiorare sia la stabilità del sistema di controllo che l’effetto prodotto dal rumore di misura. Talvolta per azzerare l’errore si preferisce sommare all’ingresso u(t) un valore costante U (chiamato valore di reset). azione integrale La differenza fra i comandi u(t) e u(0) è proporzionale all’integrale dell’errore nell’intervallo [0,t]. L’importanza dell’azione integrale deriva dal fatto di assicurare errore nullo a regime per variazioni a gradino del segnale di riferimento (set-point) e del disturbo sull’uscita. Inoltre l’errore si mantiene nullo anche in presenza di variazioni del guadagno in continua del processo. Nel regolatore PI l’azione integrale si somma a quella proporzionale garantendo il reset automatico. Gli inconvenienti maggiori dell’azione integrale sono legati al problema noto come wind-up e al passaggio da funzionamento manuale ad automatico del regolatore. azione derivativa Il comando u(t) è proporzionale alla derivata dell’errore e(t). L’azione derivativa è utile per processi che hanno uno scarso margine di stabilità, non facilmente migliorabile con l’azione proporzionale. D’altra parte l’azione derivativa risulta dannosa per quanto riguarda l’effetto prodotto dal rumore ad alte frequenze sul comando u(t), e non viene mai utilizzata da sola perché farebbe perdere al sistema di controllo la fondamentale proprietà di essere passa-basso.
 è proporzionale all’errore e(t). L’errore di regolazione in genere non si annulla all’infinito, ma risulta comunque inversamente proporzionale alla costante di proporzionalità K. D’altra parte l’aumento del guadagno K tende a far peggiorare sia la stabilità del sistema di controllo che l’effetto prodotto dal rumore di misura. Talvolta per azzerare l’errore si preferisce sommare all’ingresso u(t) un valore costante U (chiamato valore di reset). azione integrale. La differenza fra i comandi u(t) e u(0) è proporzionale all’integrale dell’errore nell’intervallo [0,t]. L’importanza dell’azione integrale deriva dal fatto di assicurare errore nullo a regime per variazioni a gradino del segnale di riferimento (set-point) e del disturbo sull’uscita. Inoltre l’errore si mantiene nullo anche in presenza di variazioni del guadagno in continua del processo. Nel regolatore PI l’azione integrale si somma a quella proporzionale garantendo il reset automatico. Gli inconvenienti maggiori dell’azione integrale sono legati al problema noto come wind-up e al passaggio da funzionamento manuale ad automatico del regolatore. azione derivativa. Il comando u(t) è proporzionale alla derivata dell’errore e(t). L’azione derivativa è utile per processi che hanno uno scarso margine di stabilità, non facilmente migliorabile con l’azione proporzionale. D’altra parte l’azione derivativa risulta dannosa per quanto riguarda l’effetto prodotto dal rumore ad alte frequenze sul comando u(t), e non viene mai utilizzata da sola perché farebbe perdere al sistema di controllo la fondamentale proprietà di essere passa-basso.")
134
Altre azioni caratteristiche dei regolatori industriali
Azione in andata I regolatori industriali hanno spesso dei morsetti di ingresso addizionali per l’introduzione di un’azione in andata (anticipo o “feedforward”) u°(t) sulla variabile di controllo. Tale azione risulta utile nei casi in cui si ha a disposizione delle misure sul disturbo sull’uscita. Guadagno variabile Alcuni regolatori possono far dipendere il guadagno dell’azione integrale dall’errore di regolazione e(t). Nel caso più comune si hanno due valori fissabili a priori, ed è usato il più piccolo fino a quando l’errore rimane in un intervallo prefissato, mentre al di fuori di tale intervallo è usato il maggiore. Controllo a tempo proporzionale I regolatori commerciali sono predisposti per uscite analogiche di caratteristiche standard (4÷20 mA e 0÷10 V). Esistono anche le predisposizioni per uscite di tipo logico a relay, dette a “tempo proporzionale”. In tal caso si usa un circuito, detto PWM (Pulse Width Modulator), che modula la durata degli intervalli nei quali il comando è on/off. Saturazioni comando La variabile di controllo u(t) in un qualsiasi anello di regolazione è sempre limitata superiormente e inferiormente. In alcuni casi, come per esempio in presenza di variazioni rilevanti dei segnali agenti sul sistema di controllo, può accadere che il comando vada in saturazione. In tal caso anche il regolatore lavora ad anello aperto ed integrando un segnale praticamente costante può allontanarsi molto dal campo di valori utili per il controllo. Questo implica che occorrerà molto tempo per ristabilire i valori normali di controllo (wind-up).
 u°(t) sulla variabile di controllo. Tale azione risulta utile nei casi in cui si ha a disposizione delle misure sul disturbo sull’uscita. Guadagno variabile. Alcuni regolatori possono far dipendere il guadagno dell’azione integrale dall’errore di regolazione e(t). Nel caso più comune si hanno due valori fissabili a priori, ed è usato il più piccolo fino a quando l’errore rimane in un intervallo prefissato, mentre al di fuori di tale intervallo è usato il maggiore. Controllo a tempo proporzionale. I regolatori commerciali sono predisposti per uscite analogiche di caratteristiche standard (4÷20 mA e 0÷10 V). Esistono anche le predisposizioni per uscite di tipo logico a relay, dette a tempo proporzionale . In tal caso si usa un circuito, detto PWM (Pulse Width Modulator), che modula la durata degli intervalli nei quali il comando è on/off. Saturazioni comando. La variabile di controllo u(t) in un qualsiasi anello di regolazione è sempre limitata superiormente e inferiormente. In alcuni casi, come per esempio in presenza di variazioni rilevanti dei segnali agenti sul sistema di controllo, può accadere che il comando vada in saturazione. In tal caso anche il regolatore lavora ad anello aperto ed integrando un segnale praticamente costante può allontanarsi molto dal campo di valori utili per il controllo. Questo implica che occorrerà molto tempo per ristabilire i valori normali di controllo (wind-up).")
135
Note sulla scelta della legge di controllo
I regolatori industriali sono molto utilizzati per il controllo di processi industriali. Uno dei motivi principali è relativo al fatto che le specifiche di controllo non sono mai molto stringenti. Il PI risulta adeguato per processi caratterizzati essenzialmente da una dinamica del primo ordine, oltre a un eventuale ritardo puro. Il regolatore I risulta adeguato per processi puramente algebrici (dinamica trascurabile) come la regolazione di portata con valvole. Il regolatore PID è indicato per sistemi dove la dinamica risulta essenzialmente del secondo ordine. Nel caso di ritardo puro trascurabile, l’azione derivativa fornisce un anticipo di fase utile per assicurare la stabilità dell’anello in una banda passante più ampia. Se invece il ritardo puro è dominante risulta necessario utilizzare schemi di controllo più sofisticati come il predittore di Smith oppure il controllo in cascata. Il regolatore PID può risultare inadeguato per sistemi con modi oscillatori sostenuti. Tali situazioni si incontrano nei servo-posizionatori elettrodinamici e oleo-dinamici, in cui sono presenti masse mobili, collegate tra loro e con la base fissa mediante trasmissioni in qualche misura elastiche. Esistono diversi metodi per tarare i parametri dei regolatori industriali, sia con procedure manuali che automatiche. Tali metodi sono basati sullo studio della risposta al gradino, sulla determinazione di alcuni punti della risposta in frequenza, e sulla stima parametrica del processo. -st -st G(s)= K e /(1+ Ts) G(s)= K e /(1 + 2ds/ωn + s²/ωn²) Dinamica del primo ordine + ritardo Dinamica del secondo ordine + ritardo
 come la regolazione di portata con valvole. Il regolatore PID è indicato per sistemi dove la dinamica risulta essenzialmente del secondo ordine. Nel caso di ritardo puro trascurabile, l’azione derivativa fornisce un anticipo di fase utile per assicurare la stabilità dell’anello in una banda passante più ampia. Se invece il ritardo puro è dominante risulta necessario utilizzare schemi di controllo più sofisticati come il predittore di Smith oppure il controllo in cascata. Il regolatore PID può risultare inadeguato per sistemi con modi oscillatori sostenuti. Tali situazioni si incontrano nei servo-posizionatori elettrodinamici e oleo-dinamici, in cui sono presenti masse mobili, collegate tra loro e con la base fissa mediante trasmissioni in qualche misura elastiche. Esistono diversi metodi per tarare i parametri dei regolatori industriali, sia con procedure manuali che automatiche. Tali metodi sono basati sullo studio della risposta al gradino, sulla determinazione di alcuni punti della risposta in frequenza, e sulla stima parametrica del processo. -st. -st. G(s)= K e /(1+ Ts) G(s)= K e /(1 + 2ds/ωn + s²/ωn²) Dinamica del primo ordine + ritardo. Dinamica del secondo ordine + ritardo.")
136
TARATURA DEI CONTROLLORI PID
Esistono numerose regole empiriche e metodi sistematici per la scelta dei guadagni Kp , Ki, Kd del controllore PID alcuni dei quali non richiedono la conoscenza della f.d.t. G(s) del processo da controllare.
 del processo da controllare.")
137
METODO DI ZIEGLER-NICHOLS AD ANELLO CHIUSO
Si determinano sperimentalmente: guadagno critico Kc periodo critico Tc come il valore del guadagno a cui il sistema oscilla ed il relativo periodo di oscillazione. Kp Ti Td P Kc PI Kc Tc PID Kc Tc Tc

138
METODO DI ZIEGLER-NICHOLS AD ANELLO APERTO
Si determinano sperimentalmente: f.d.t. del processo G(s) = K exp(-ts) / (1+Ts) guadagno K, ritardo T, costante di tempo t Kp Ti Td P T/(Kt) PI T/(Kt) 3t PID T/(Kt) 2t t
 = K exp(-ts) / (1+Ts) guadagno K, ritardo T, costante di tempo t. Kp Ti Td. P T/(Kt) PI 0.9 T/(Kt) 3t. PID 1.2 T/(Kt) 2t 0.5t.")
139
METODO DI ZIEGLER-NICHOLS AD ANELLO CHIUSO
Si determinano sperimentalmente: guadagno critico Kc periodo critico Tc come il valore del guadagno a cui il sistema oscilla ed il relativo periodo di oscillazione. Kp Ti Td P Kc PI Kc Tc PID Kc Tc Tc

140
CENNI DI CONTROLLO DIGITALE
y ek Controllore digitale C uk u Processo P r e A/D D/A A/D: convertitore analogico/digitale; converte il segnale analogico e(t) in una sequenza di dati binari ek = e(kD) a N bit. D/A: convertitore digitale/analogico; converte la sequenza uk in un segnale analogico u(t)
 in una sequenza. di dati binari ek = e(kD) a N bit. D/A: convertitore digitale/analogico; converte. la sequenza uk in un segnale analogico u(t)")
141
CAMPIONATORE (Convertitore A/D)
ek e(t) Campionatore ideale: ek = e(kD) k=0,1,2,…….. D : periodo di campionamento A/D effettua campionamento e quantizzazione del campione ek su una parola di N cifre binarie
 Campionatore ideale: ek = e(kD) k=0,1,2,…….. D : periodo di campionamento. A/D effettua campionamento e quantizzazione. del campione ek su una parola di N cifre binarie.")
142
MANTENITORE (Convertitore D/A)
uk u(t) Mantenitore di ordine zero (Zero-Order-Hold): u(t)= uk kD t < (k+1) D k=0,1,2,…….. D : periodo di campionamento D/A : fornisce in uscita un segnale costante a tratti mantenendo l’uscita al valore uk nell’intervallo [ kD ,(k+1)D )
 Mantenitore di ordine zero (Zero-Order-Hold): u(t)= uk kD t < (k+1) D k=0,1,2,…….. D : periodo di campionamento. D/A : fornisce in uscita un segnale costante. a tratti mantenendo l’uscita al valore uk. nell’intervallo [ kD ,(k+1)D )")
143
CONTROLLORE (REGOLATORE, COMPENSATORE) DIGITALE
C(z) ek uk Nel periodo di campionamento [ kD ,(k+1)D ), dopo aver campionato ek, il controllore digitale calcola uk mediante l’equazione alle differenze uk+p1uk-1+ ••• +pruk-r = q0ek+q1ek-1+ ••• + qsek-s
 ek. uk. Nel periodo di campionamento [ kD ,(k+1)D ), dopo aver campionato ek, il controllore digitale. calcola uk mediante l’equazione alle differenze. uk+p1uk-1+ ••• +pruk-r = q0ek+q1ek-1+ ••• + qsek-s.")
144
p(z) C(z) ek uk L’eq.ne alle differenze del controllore digitale
CONTROLLORE (REGOLATORE, COMPENSATORE) DIGITALE C(z) ek uk L’eq.ne alle differenze del controllore digitale uk+p1uk-1+ ••• +pruk-r = q0ek+q1ek-1+ ••• + qsek-s è rappresentata sinteticamente dalla funzione di trasferimento: q(z) q0 + q1z-1 + … + qr-1z-s+1 + qsz-s p(z) C(z) = = 1 + p1z-1 + … + pr-1z-r+1 + prz-r
 DIGITALE. C(z) ek. uk. L’eq.ne alle differenze del controllore digitale. uk+p1uk-1+ ••• +pruk-r = q0ek+q1ek-1+ ••• + qsek-s. è rappresentata sinteticamente dalla funzione. di trasferimento: q(z) q0 + q1z-1 + … + qr-1z-s+1 + qsz-s. p(z) C(z) = = 1 + p1z-1 + … + pr-1z-r+1 + prz-r.")
145
SINTESI DI UN CONTROLLORE DIGITALE
Esistono due diverse filosofie di progetto di un sistema di controllo digitale: (1) Discretizzazione di un controllore analogico: si progetta con tecniche classiche (ad esempio sintesi per tentativi) la f.d.t. C(s) di un controllore analogico che consente di soddisfare tutte le specifiche (statiche e dinamiche); successivamente si determina la f.d.t. Cd(z) di un controllore digitale che, collegato in serie fra D/A e A/D, approssima il comportamento del controllore analogico progettato. (2) Sintesi diretta di un controllore digitale: si approssima la connessione serie mantenitore-processo G(s)-campionatore con una f.d.t. Gd(z) e si progetta direttamente in tempo-discreto un controllore C(z) che soddisfa tutte le specifiche.
 Discretizzazione di un controllore analogico: si progetta con. tecniche classiche (ad esempio sintesi per tentativi) la f.d.t. C(s) di un controllore analogico che consente di soddisfare tutte le. specifiche (statiche e dinamiche); successivamente si determina. la f.d.t. Cd(z) di un controllore digitale che, collegato in serie fra. D/A e A/D, approssima il comportamento del controllore. analogico progettato. (2) Sintesi diretta di un controllore digitale: si approssima la. connessione serie mantenitore-processo G(s)-campionatore con. una f.d.t. Gd(z) e si progetta direttamente in tempo-discreto. un controllore C(z) che soddisfa tutte le specifiche.")
146
SCELTA DEL PERIODO DI CAMPIONAMENTO
D : periodo di campionamento 1/D : frequenza di campionamento 2p /D : pulsazione di campionamento p /D : pulsazione di Nyquist La scelta del periodo di campionamento D è fondamentale nei sistemi di controllo digitale. Essa è prevalentemente influenzata dai seguenti fattori: - costo dei dispositivi A/D, D/A e potenza di calcolo richiesta - problemi numerici (perdita di precisione per D piccolo) - sensibilità ai disturbi - campionamento e informazione: la pulsazione di campionamento va commensurata alla banda richiesta al sistema retroazionato
 - sensibilità ai disturbi. - campionamento e informazione: la pulsazione di campionamento. va commensurata alla banda richiesta al sistema retroazionato.")
147
SCELTA DEL PERIODO DI CAMPIONAMENTO
D : periodo di campionamento 1/D : frequenza di campionamento 2p /D : pulsazione di campionamento p /D : pulsazione di Nyquist Se wB è la banda passante desiderata occorre scegliere (per il teorema di Shannon) p /D > wB ; una buona regola euristica è 6 < wc / wB < 20, wc = 2p /D
 p /D > wB ; una buona regola euristica è. 6 < wc / wB < 20, wc = 2p /D.")
148
DISCRETIZZAZIONE DI UN CONTROLLORE DIGITALE
Esistono numerosi metodi per effettuare l’approssimazione C(s) Cd(z), quali METODO DI EULERO (in avanti) s= (z-1)/D METODO DI EULERO (indetro) s= (z-1)/ (D z) METODO DI TUSTIN s=2(z-1)/D (z+1) L’approssimazione è tanto migliore quanto più D è piccolo; buona regola euristica wc / wB = 20 wc = 2p/D
 Cd(z), quali. METODO DI EULERO (in avanti) s= (z-1)/D. METODO DI EULERO (indetro) s= (z-1)/ (D z) METODO DI TUSTIN s=2(z-1)/D (z+1) L’approssimazione è tanto migliore quanto più. D è piccolo; buona regola euristica. wc / wB = 20 50 wc = 2p/D.")
149
Modello discreto equivalente Gd(z) = (z-1/z) Z[G(s)/s]
SINTESI DIRETTA DI UN CONTROLLORE DIGITALE yk uk ZOH Processo G(s) A/D yk uk Gd(z) Modello discreto equivalente Gd(z) = (z-1/z) Z[G(s)/s]
![Modello discreto equivalente Gd(z) = (z-1/z) Z[G(s)/s]](http://slideplayer.it/slide/5116001/16/images/149/Modello+discreto+equivalente+Gd%28z%29+%3D+%28z-1%2Fz%29+Z%5BG%28s%29%2Fs%5D.jpg "SINTESI DIRETTA DI UN CONTROLLORE DIGITALE. yk. uk. ZOH. Processo G(s) A/D. yk. uk. Gd(z) Modello discreto equivalente. Gd(z) = (z-1/z) Z[G(s)/s]")
150
CONTROLLORE PID DIGITALE
CPID(s) = Kp + Ki /s + Kd s s (z-1)/Dz (approssimazione di Eulero) CPID(z) = Kp + Ki Dz /(z-1) + Kd (z-1)/Dz uk=uk-1 +Kp(ek -ek-1) + KiD ek + (Kd/D ) (ek-2ek-1+ek-2) ek uk PID digitale
 = Kp + Ki /s + Kd s. s (z-1)/Dz (approssimazione di Eulero) CPID(z) = Kp + Ki Dz /(z-1) + Kd (z-1)/Dz. uk=uk-1 +Kp(ek -ek-1) + KiD ek + (Kd/D ) (ek-2ek-1+ek-2) ek. uk. PID digitale.")
151
IMPLEMENTAZIONE DI UN CONTROLLORE DIGITALE
(1) Acquisizione di ek dal convertitore A/D (2) Calcolo di uk mediante eq.ne alle differenze (3) Invio di uk al convertitore D/A
 Acquisizione di ek dal convertitore A/D. (2) Calcolo di uk mediante eq.ne alle differenze. (3) Invio di uk al convertitore D/A.")
Presentazioni simili













>")
 Reti Elettriche Parte II Revisione aggiornata al 16 maggio 2011 (www.elettrotecnica.unina.it)>")
 Reti Elettriche Parte II Revisione aggiornata al 6 giugno 2012 (www.elettrotecnica.unina.it)>")





