Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
MECCANISMI DI CONTROLLO NEUROMOTORIO UNIVERSITA’ DEGLI STUDI DI NAPOLI “FEDERICO II” Corso di Laurea in Logopedia A.A. 2014/2015 Dott.ssa Paola Villari A cura delle stud.sse: Di Bello Angela Di Matteo Debora Vagnoni Marina

2
Corpo e movimento costituiscono uno dei nuclei fondamentali su cui si struttura l’intero processo di sviluppo di un individuo. La crescita del bambino avviene, fin dai primi giorni di vita, anche e soprattutto attraverso la dimensione corporea e motoria. Il corpo e il movimento

3
◦il corpo fin dalla nascita è messo in relazione e comunicazione con il mondo esterno ◦il bambino comunica essenzialmente attraverso il corpo ◦il corpo è sede di investimenti pulsionali e di relazione ◦la comunicazione del bambino piccolo ha come tramite il tessuto muscolare

4
Il movimento è una modalità che abbiamo a disposizione per conoscere, e cioè per dare un senso al mondo. Ciò può esser verificato molto semplicemente, ad esempio, tenendo la mano immobile su un oggetto: in questo caso potremmo capire solo alcune caratteristiche di un determinato oggetto senza riuscire ad apprezzarne la forma complessiva.

5
Per poter valutare in maniera completa il nostro oggetto abbiamo necessità di raccogliere ulteriori informazioni rappresentate da quell’insieme di segni che lo distinguono da tutti gli altri: questo obiettivo può esser raggiunto grazie all’adozione di una strategia di “palpeggiamento attivo” dell’oggetto, che prevede l’esecuzione di opportuni movimenti delle dita della mano. Anche un semplice esempio come quello della ricerca della chiave di casa rivela che la distinzione tra ciò che è sensitivo e ciò che è motorio non facilita la comprensione della fisiologia dell’azione.

6
Infatti, i nostri movimenti sarebbero alquanto maldestri se essi fossero unicamente il prodotto di una successione di segnali motori in uscita che, partendo dal SNC, si dirigono verso la periferia rappresentata dai muscoli. E' stato infatti dimostrato che il nostro sistema muscolo-scheletrico sarebbe impossibile da controllare se non potessimo contare su un ampio corredo di segnali sensoriali di ritorno che ci permettono di monitorare i nostri movimenti, ed eventualmente di correggerli in tempo reale (Bernstein).
..")
7
I movimenti non possono esser considerati come delle semplici risposte a stimoli esterni. È infatti evidente l’entrata in gioco di altri fattori, quali ad esempio la nostra esperienza passata; ma ciò che preme sottolineare, anche dal punto di vista della strutturazione dell’esercizio riabilitativo, è che l’azione nel suo complesso rimane sempre orientata al futuro, poiché viene costruita sulla base di un piano o di una intenzione finalizzata al conseguimento di uno specifico scopo (Luria).
..")
8
Un fondamentale contributo alla comprensione della struttura complessa dell’azione proviene dagli studi del neurofisiologo Anochin. Il suo modello è di particolare interesse per il Riabilitatore poiché, oltre al movimento osservabile, prende in opportuna considerazione anche i processi neuronali preparatori, di programmazione e previsionali ad esso soggiacenti.

9
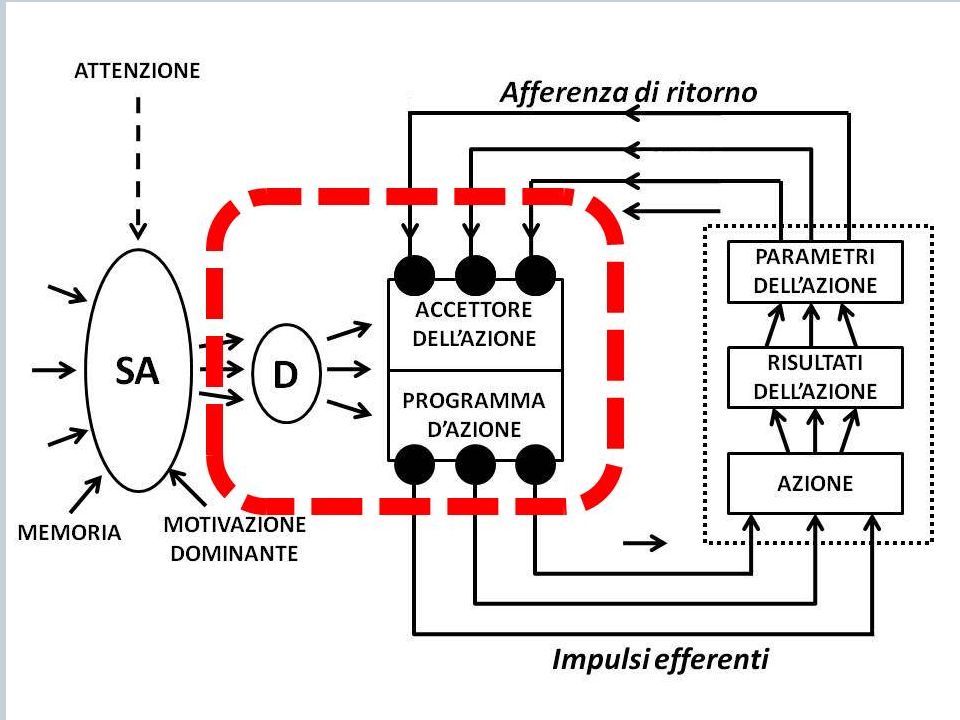
SCHEMA DI ANOCHIN

11
Ogni azione diretta ad uno scopo ha alla base una Motivazione dominante: la necessità biologica di portare a termine un “compito motorio”. All’organizzazione di questo processo contribuiscono numerose formazioni nervose, tra cui la Memoria. Alla confluenza di questi processi sorge la “presa di decisione”(D) che conduce all’azione: essa sfocia nella contemporanea formulazione di un “programma d’azione” e di un “accettore dell’azione”, ovvero di un apparato di previsione dei risultati da ottenere. In caso di una loro concordanza, questo processo circolare si conclude.
 che conduce all’azione: essa sfocia nella contemporanea formulazione di un programma d’azione e di un accettore dell’azione , ovvero di un apparato di previsione dei risultati da ottenere. In caso di una loro concordanza, questo processo circolare si conclude..")
12
Noi non siamo consapevoli della complessità di questi processi: mentre passeggiamo per strada immersi nei nostri pensieri siamo in grado di accorgerci immediatamente della presenza di un “errore”, segno evidente che l’insieme delle informazioni sensoriali che il nostro cammino dovrebbe produrre vengono specificate in anticipo: dunque che avevamo fatto un’ipotesi percettiva.

13
Allo stesso modo, se, infilando distratti il braccio nel frigorifero per afferrare una bottiglia d’acqua, afferrassimo invece un altro contenitore,correggeremmo immediatamente una simile imprecisione: indirizzeremmo la nostra Attenzione verso la raccolta di ulteriori informazioni utili al raggiungimento del risultato finale, e riformuleremmo il programma d’azione e il conseguente accettore d’azione relativo.

14
L’Ipotesi percettiva funge dunque da sistema di controllo e di analisi tra la corrispondenza tra le informazioni attese e quelle ottenute con il movimento reale: in questo modo, Anochin si era avvicinato al concetto equivalente a quello che oggi chiameremmo “modello interno” dell’azione.

15
Esempio di una funzione motoria: sistema funzionale di manipolazione e prensione. Elementi della funzione “raggiungimento di un oggetto” : Mappa visuomotoria Mappa propriocettiva Livello “scopo” Livello esecutivo

16
Mappa visuo-motoria: Trasformazione delle informazioni visive sull'oggetto da raggiungere in un'attività muscolare. Ciò che si vede dell'oggetto deve diventare una serie di comandi agli effettori muscolari del braccio che deve raggiungerlo. Questi processi avvengono a livello del lobo parietale.

17
Mappa propriocettiva: Vengono analizzate le informazioni propriocettive a partenza dai recettori articolari e dalle zone relative al braccio che si deve muovere (dove si trova il braccio). Queste informazioni sono elaborate a livello dell'area 14. La fusione tra le due mappe avviene a livello dell'area parietale posteriore.

18
Livello scopo: Definizione e determinazione dello scopo dell'azione (ad esempio, se la mano dovrà arrivare a una distanza di 10 cm o di 40 cm). Questo avviene a livello dell'area pre- frontale (elaborazione dei parametri dell'azione: direzione, distanza, orientamento).
..")
19
Livello esecutivo: Generazione dei comandi motori (reclutamento delle unità motorie necessarie a portare il braccio verso l'oggetto). A questo livello avviene il passaggio dalle aree premotorie alle aree motorie principali.

20
Simultaneamente all'elaborazione delle informazioni relative all'oggetto avvengono una serie di adattamenti dinamici a livello delle unità motorie. Le proprietà dell'oggetto vengono codificate e trasformate in movimenti distali. Le trasformazioni avvengono prima del reclutamento distale.

21
In ambito riabilitativo, il concetto di “ipotesi percettiva” trova una collocazione fondamentale all’interno della Teoria Neurocognitiva, ed assume un ruolo di strumento indispensabile dell’esercizio. Ogni esercizio rappresenta un “problema conoscitivo”.

22
Esempio: un esercizio di riconoscimento di diverse sagome

26
LO SCHEMA CORPOREO

27
Per potersi proiettare verso l'esterno, l'individuo parte da un'immagine spaziale del proprio corpo codificata a livello cerebrale: lo schema corporeo. Per schema corporeo si intende una funzione complessa di sintesi che permette di: riconoscere il proprio corpo come unità individuarne la morfologia, i rapporti esistenti con i suoi vari segmenti e la mutevole posizione nello spazio. Possedere un buono schema corporeo permette di organizzare le sensazioni del proprio corpo in rapporto con i dati del mondo esterno.

28
Tutte le informazioni senso-percettive che arrivano al cervello sono funzionali alla creazione del vissuto corporeo e di conseguenza dello schema corporeo a livello grafico. I canali attraverso i quali arrivano le informazioni sono: – Esterocettori cutanei, visivi e uditivi. – Propriocettori, che trasmettono le informazioni provenienti dai muscoli, dai tendini, dalle articolazioni. – Enterocettori, che consentono l’arrivo delle informazioni attraverso la respirazione, gli organi viscerali. – Componenti mnestiche, emotive e affettive, indicate come componenti psicologiche. Creazione dello schema corporeo

29
La base neurale dello schema può essere ricondotta ad aree della corteccia parietale e a due vie nervose: 1) corteccia somatosensoriale; 2) corteccia di aree del lobo parietale responsabili della struttura mentale dell’immagine del corpo; 3) corteccia di aree del lobo parietale rilevanti per la coscienza del sé corporeo; 4) via che proietta alla corteccia somestesica, attraverso il talamo, segnali sensitivi che saranno elaborati in sensazioni di posizione, tattili, termiche, ecc.; 5) via che attraversa le strutture del sistema limbico e conferisce alle sensazioni le componenti emozionali associate al dolore e all’ansia.
 corteccia somatosensoriale; 2) corteccia di aree del lobo parietale responsabili della struttura mentale dell’immagine del corpo; 3) corteccia di aree del lobo parietale rilevanti per la coscienza del sé corporeo; 4) via che proietta alla corteccia somestesica, attraverso il talamo, segnali sensitivi che saranno elaborati in sensazioni di posizione, tattili, termiche, ecc.; 5) via che attraversa le strutture del sistema limbico e conferisce alle sensazioni le componenti emozionali associate al dolore e all’ansia.")
30
La consapevolezza dell'immagine corporea è vaga e indeterminata ed è strutturata in modo differente per le diverse porzioni corporee; uno strumento utilizzato in maniera continua o un oggetto portato usualmente (indumenti, ornamenti, occhiali) può entrare a far parte in forma temporanea del modello di noi stessi e diventare parte dello schema del corpo.
 può entrare a far parte in forma temporanea del modello di noi stessi e diventare parte dello schema del corpo.")
31
I disturbi dello schema corporeo possono essere bilaterali o unilaterali e vengono indicati come positivi o negativi. I disturbi positivi sono rappresentati dall'arto fantasma, cioè l'illusione dell'esistenza di parti del corpo che invece sono state perdute, per asportazione chirurgica o incidente; I disturbi negativi indicano la negligenza del soggetto nei riguardi di una parte del proprio corpo, in genere di una metà del corpo (eminegligenza).
..")
32
DISTURBI DELLO SCHEMA CORPOREO

33
L'autotopoagnosia è un disturbo che implica l'incapacità del paziente di localizzare una parte del corpo. E' dovuta in genere a una lesione nel lobo parietale sinistro da tumori primitivi o metastatici.

34
Nell'acinesia motoria, il soggetto non utilizza il braccio sinistro, anche se non paretico, quando è invitato a sollevare insieme le due braccia: esegue cioè l'invito con il braccio omolaterale alla sede di lesione emisferica come se il braccio controlaterale non esistesse.

35
L'emisomatoagnosia conscia consiste nella perdita della percezione di metà del proprio corpo. La lesione cerebrale associata a questi disturbi si può ritrovare sia nell'emisfero destro sia nel sinistro. Nell'emisomatoagnosia non conscia il soggetto non avverte come propria la metà sinistra del corpo, e quindi si sbarba, per es., solo la metà destra della faccia, oppure non posiziona correttamente la stanghetta degli occhiali dietro l'orecchio sinistro.

36
Nei casi di amputazione l'arto fantasma è contraddistinto dalla percezione dell'arto perduto con tutte le caratteristiche spaziali di un arto, associato di solito a disturbi sensitivi e soprattutto dolore. Il soggetto ha la convinzione realistica dell'esistenza del suo arto, per cui, per es., può alzarsi nel tentativo di camminare, mentre non è in grado di reggersi in piedi. Il dolore è bruciante e 'reale', mentre è 'fantasma' la parte del corpo cui è riferito. La porzione di corteccia sensitiva che non riceve più afferenze sensitive viene invasa da stimoli che provengono da parti adiacenti cui afferiscono altre porzioni del corpo.

37
Nella macro- e microsomatoagnosia il soggetto avverte il proprio corpo, o parti di esso, abnormemente grandi o piccole, talora con senso di pesantezza o distorsione. Usualmente il fenomeno si ritrova nell'epilessia temporale, nell'emicrania, in malattie cerebrali focali, in soggetti con disturbi dell'addormentamento, in malattie psichiatriche (per es. la schizofrenia) e in psicosi indotte da LSD o anfetamina.
 e in psicosi indotte da LSD o anfetamina..")
38
Sono dei prerequisiti presenti alla nascita in ogni individuo, i quali, se vi è un normale sviluppo psicomotorio sino agli 11 anni circa, portano all’acquisizione di varie abilità motorie sempre più particolari e complesse. Le varie abilità motorie verranno combinate tra loro man mano che l’individuo le fa proprie, sino ad arrivare ad automatizzare i movimenti. Le Capacità Motorie

39
Le capacità motorie si suddividono in: Condizionali e Coordinative, le prime prerequisiti strutturali e le seconde prerequisiti funzionali.

40
Le capacità condizionali sono essenzialmente: forza, velocità e resistenza. Esse sono prerequisiti strutturali e rappresentano quelle caratteristiche uniche della morfologia umana, legate inequivocabilmente ad un aspetto strutturale del proprio corpo (muscoli, ossa, sistema nervoso, etc.). Le Capacità Condizionali
. Le Capacità Condizionali.")
41
Sono delle capacità atte a regolare e controllare il movimento e sono prerequisiti funzionali che, a loro volta, si suddividono in generali e speciali. Quelle generali sono: ◦capacità di adattamento e trasformazione del movimento; ◦capacità del controllo motorio; ◦capacità dell’apprendimento motorio. Quelle speciali invece sono essenzialmente: ◦capacità di combinazione motoria, di equilibrio, di differenziazione spazio-temporale, di orientamento, di anticipazione motoria, di differenziazione dinamica, di fantasia motoria, di ritmizzazione, di elasticità del movimento, di memorizzazione motoria, ideo-senso-motoria, di destrezza fine, di dinamica generale etc. Le Capacità Coordinative

42
Le capacità coordinative speciali permettono di raggiungere il controllo e l’affinamento motorio a livello della coordinazione esecutiva. Secondo Martin e Hirtz, queste si sviluppano soprattutto nell’età compresa tra i 6 ed i 12 anni. Le capacità coordinative speciali

43
Lo sviluppo di questa capacità è proporzionata all’abilità di controllare e di orientare il corpo nello spazio, traendo le corrette informazioni trasmesse dai sistemi dei recettori cinestetici, visivi, labirintici a disposizione del soggetto. Capacità di equilibrio

44
Rappresenta l’abilità del soggetto di muoversi nello spazio in rapporto al contesto. Questa capacità è strettamente connessa a quella di controllo e di equilibrio e risente delle informazioni ricevute dai recettori visivi, uditivi, cinestetici e statico-dinamici. Tenuto conto che le sollecitazioni dell’ambiente sono innumerevoli, è necessario che il soggetto sia capace di sviluppare una programmazione motoria di tipo flessibile. Capacità di orientamento

45
Consiste nel combinare diversi sistemi motori in una sequenza motoria unitaria. Capacità di combinazione motoria

46
Consente di ordinare in sequenza spazio- temporale i movimenti parziali e di trasformarli in un unico e complesso atto motorio. L’articolazione dei movimenti parziali si svolge nella dimensione del prima, dopo, lento, veloce, simultaneo, presuppone che il soggetto conosca i concetti topologici che gli permettono di stare nello spazio in una posizione precisa rispetto agli oggetti e alle persone fermi o in movimento. Capacità di differenziazione spazio-temporale

47
E’ la capacità di distinguere le sensazioni che ci provengono dal mondo esterno attraverso gli organi di senso. Capacità di differenziazione dinamica

48
Consente di percepire in anticipo attraverso delle supposizioni la qualità di un’azione, prospettando in seguito successive operazioni. La parola chiave di questa capacità è la prevedibilità, ovvero la corretta interpretazione di un fenomeno motorio che sta accadendo e di fronte al quale il soggetto deve sapere mettere in atto le operazioni motorie a suo tempo programmate. Occorre che il soggetto abbia buone capacità cognitive e psicomotorie che gli permettano di preparare adeguatamente una reazione motoria. Capacità di anticipazione

49
Consiste nello svolgimento originale e creativo del compito motorio, ipotizzando schemi di azione sempre nuovi. Ad essa è collegata la memoria motoria e l’anticipazione. La memoria permette al soggetto di immaginare con la programmazione ideo-motoria l’esecuzione del movimento mai prima realizzato; l’anticipazione sviluppa abilità predittive non soltanto dal punto di vista della finalità motoria, ma anche dei risultati. Capacità di fantasia motoria

50
IL MOVIMENTO CORPOREO

51
E’ espressione sia dell’aspetto psicologico che organico dell'individuo. Si sviluppa a partire da alcune capacità che permettono di assumere varie posture (schemi posturali) e di poter compiere movimenti sempre più complessi e controllati (schemi motori). Il movimento corporeo
 e di poter compiere movimenti sempre più complessi e controllati (schemi motori). Il movimento corporeo.")
52
SCHEMI MOTORI DI BASE: strisciare, rotolare, afferrare, portare, arrampicare, camminare, correre, saltare, lanciare, calciare. SCHEMI POSTURALI DI BASE: flettere, piegare, addurre, abdurre, ruotare, slanciare, elevare, circondurre, torcere, etc. Rappresentano le unità di base del movimento volontario finalizzato e sono chiamati di base perché appaiono per primi nello sviluppo dell’individuo e diventano patrimonio originario dell’adulto. Schemi motori e posturali di base

53
Gli schemi motori possiamo definirli come sequenze di movimenti realizzate in “modo automatico”. Gli schemi motori rappresentano programmi di movimento semplici che impegnano il bambino nella fascia d’età 6 – 12 anni. Si strutturano per primi durante lo sviluppo dell’individuo. Il loro sviluppo è progressivo, per stadi, ogni stadio necessita del precedente ed avviene con la pratica,senza particolare attenzione alla qualità del gesto. Schemi motori di base

54
Uno schema motorio è un automatismo grezzo. Le condizioni di esecuzioni non sono ben definite e per questo si giunge ad una struttura generica del movimento, che essendo tale può essere applicata da tutti in situazioni molto diverse tra loro. – Esempio: Tutti sono capaci di lanciare la palla con le mani (schema motorio = automatismo grezzo) Non tutti sono abili a lanciare la palla a canestro, perché richiede un automatismo specifico.
 Non tutti sono abili a lanciare la palla a canestro, perché richiede un automatismo specifico..")
55
Possono essere essenzialmente di due tipi: statici e statico-dinamici, a seconda che tutto il corpo sia fermo o che una parte di esso sia ferma e l’altra si muova (flettere, piegare, circondurre, etc.). Gli schemi posturali

56
Deriva dal greco praxìa, fare. Rappresenta la capacità di fare un movimento pensato e finalizzato. Ci possono essere prassie naturali (camminare, correre, gesticolare, afferrare...) o acquisite (attività collegate al sapere fare, manipolare, costruire, montare o smontare un oggetto…). Alcune prassie sono: equilibrio, coordinazione oculo manuale, respirazione, propriocettività specifica, evoluzione del disegno ecc... LE PRASSIE
 o acquisite (attività collegate al sapere fare, manipolare, costruire, montare o smontare un oggetto…). Alcune prassie sono: equilibrio, coordinazione oculo manuale, respirazione, propriocettività specifica, evoluzione del disegno ecc... LE PRASSIE.")
57
Gnosia è la interiorizzazione percettiva che diviene stabile sul piano psichico cosciente grazie alla spinta delle funzioni prassiche. Se la prassia è il poter fare qualche cosa, la gnosia è il saper fare. Il piano gnosico per eccellenza è lo schema corporeo LE GNOSIE

58
Consiste nella capacità di controllare il movimento in funzione dello scopo previsto, ovvero di raggiungere esattamente il risultato programmato del movimento. Scaturisce dal progetto di azione, dal programma motorio, dalla comparazione tra obiettivo previsto e conseguito, dalla percezione dell’errore e dalla necessità di correzione e rimodulazione del progetto per riprendere il processo. La complessità è proporzionale ad una serie di fattori: numero dei movimenti richiesti per effettuare la prestazione, durata, intensità, quantità di forza spesa, capacità di percepire l’errore e di correggerlo immediatamente. Controllo motorio

59
Consiste nella capacità da parte del soggetto di adattare o trasformare il programma motorio prestabilito a mutamenti inattesi ed improvvisi della situazione, quindi capacità di interruzione del movimento di risposta già programmato e prosecuzione per mezzo di altri schemi e programmi motori ugualmente efficaci. Adattamento e trasformazione

60
Ogni azione deve essere selezionata e la sequenza deve essere assemblata e immagazzinata in memoria. Con la pratica, la sequenza si consolida e diviene automatica. Il movimento è il risultato della rappresentazione mentale dell'attività e della pianificazione degli atti sequenziali elementari indispensabili per realizzarla (controllo dell’azione mentre viene preparata) feed-forward, seguita dal controllo (feed-back) nel corso dell’esecuzione ad opera del sistema effettore e, infine, dalla verifica del risultato (feed- back a posteriori). Feed-forward, feed-back e feed- back a posteriori
 feed-forward, seguita dal controllo (feed-back) nel corso dell’esecuzione ad opera del sistema effettore e, infine, dalla verifica del risultato (feed- back a posteriori). Feed-forward, feed-back e feed- back a posteriori.")
61
Per apprendimento motorio si intende il passaggio dal movimento volontario a quello automatico. Gli impulsi nervosi determinano una sorta di traccia del percorso tra le cellule cerebrali. In un successivo passaggio gli impulsi nervosi ritrovano quella traccia che ripercorrono determinando quello che si definisce apprendimento. Apprendimento motorio

62
FASI DELL’APPRENDIMENTO MOTORIO

63
E’ una fase in cui in cui l’intervento della coscienza è forte, l’azione avviene in maniera imprecisa e l’obiettivo essenziale è quello di pervenire ad una forma grossolana del movimento da eseguire. E’ la vera fase di apprendimento: in essa sono presenti elementi sconosciuti che devono essere assimilati ex – novo. Prima fase: fase di coordinazione grezza

64
In questa seconda fase, la pratica è di maggiore qualità, l’intervento mentale cosciente diviene sempre minore, le scelte di tempo e la fluidità dei movimenti via via maggiori, fino ad approssimare un livello abbastanza fine di coordinazione. Il soggetto migliora la qualità di feedback interno e riesce a riconoscere da sé più errori e imprecisioni. Seconda fase: fase di coordinazione fine

65
E’ la fase di consolidamento del gesto, il controllo del movimento avviene secondo lo scopo previsto, cioè per raggiungere esattamente il risultato programmato del movimento. Non si tratta solo di eseguire, come prima: ora il gesto deve essere anche efficace.

66
La seconda fase dell’apprendimento comprende il timing, ovvero l’acquisizione della struttura ritmica del movimento. La capacità di percepire e sentire su se stessi il ritmo delle azioni è fondamentale per la riuscita dell'apprendimento. Interiorizzare il modello da eseguire (allenamento ideomotorio):“Il cervello non fa differenza tra una situazione realmente vissuta e una immaginata molto vividamente”. Ciò che rende la visualizzazione molto sintetica e legata in un tutt'uno dinamico e realistico è il ritmo. Timing
: Il cervello non fa differenza tra una situazione realmente vissuta e una immaginata molto vividamente . Ciò che rende la visualizzazione molto sintetica e legata in un tutt uno dinamico e realistico è il ritmo. Timing.")
67
Interiorizzare un modello significa farlo proprio, sentirlo aderente sul proprio corpo. Non si tratta di memorizzare delle immagini e basta; significa vedersi dal di dentro con tutte quelle sensazioni (tattili, uditive ecc…) che si vivrebbero proprio come se si stesse eseguendo il movimento. Terza fase: interiorizzazione del modello motorio
 che si vivrebbero proprio come se si stesse eseguendo il movimento. Terza fase: interiorizzazione del modello motorio.")
68
Quando si ripete più volte un movimento, il cervello raccoglie un mix di informazioni: ◦la contrazione dei muscoli ◦la posizione di ogni parte del corpo ◦le diverse percezioni dei vari organi di senso. Tutti questi dati vengono elaborati senza che la persona se ne renda conto, per poi essere registrati in modo indelebile nel cervello, sotto forma di traccia motoria. Memoria motoria

69
Le acquisizioni motorie possono essere memorizzate. Ciò consente : ◦a) di scegliere il movimento o la sequenza di movimenti più adeguata, per risolvere una situazione già sperimentata; ◦b) di accedere alle informazioni di carattere senso-percettivo che hanno accompagnato le precedenti acquisizioni (traccia motoria).
 di scegliere il movimento o la sequenza di movimenti più adeguata, per risolvere una situazione già sperimentata; ◦b) di accedere alle informazioni di carattere senso-percettivo che hanno accompagnato le precedenti acquisizioni (traccia motoria)..")
70
E’ il disturbo dell’intelligenza percettivo- motoria che rende difficile l’assunzione di informazione del registro percettivo e che non permette al soggetto di comportarsi adeguatamente nell’ambiente. La caratteristica prevalente dei soggetti con instabilità motoria è la labilità attentiva, l’ipermotricità. In conseguenza i movimenti risultano confusi e imprecisi. Instabilità psicomotoria

71
Libri consigliati

Presentazioni simili















>")
 Guido Sarchielli Alma Mater studiorum Università di Bologna.>")



 EDUCAZIONE MOTORIA, FISICA E SPORTIVA (Programma PERSEUS)>")

