Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
PROGETTO DI SISTEMI DI CONTROLLO
Esercizi

2
Il guadagno in catena aperta di un sistema con H=1 è
Si analizzi il comportamento del sistema dato e lo si confronti con quello dello stesso sistema in cui il guadagno è ridotto da G0=10 a G0=6

3
Utilizzare Matlab per tracciare il diagramma di Nyquist e calcolare margine di guadagno, margine di fase, pulsazione a 180° e pulsazione di transizione per i due casi G0=10 e G0=6 Valutare dal diagramma di Nyquist la stabilità del sistema e la situazione più idonea per quanto riguarda i margini di fase e guadagno Calcolare la banda passante del sistema, ricordando che la la pulsazione di transizione del guadagno in catena aperta coincide con la pulsazione di taglio superiore del sistema in catena chiusa. Calcolare il tempo di risposta utilizzando la relazione tr = 0,35/fT

4
Esempio di codice per il calcolo dei margini di un sistema e per il tracciamento del diagramma di Nyquist num1=[10]; den1=[0.1 1];den2=[0.2 1];den3=[1 1]; den4=conv(den1,den2); den=conv(den3,den4); [mag,phase,w]=bode(num1,den); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w) F1=tf(num1,den) Nyquist (F1)
; den=conv(den3,den4); [mag,phase,w]=bode(num1,den); [Gm,Pm,Wcg,Wcp]=margin(mag,phase,w) F1=tf(num1,den) Nyquist (F1)")
5
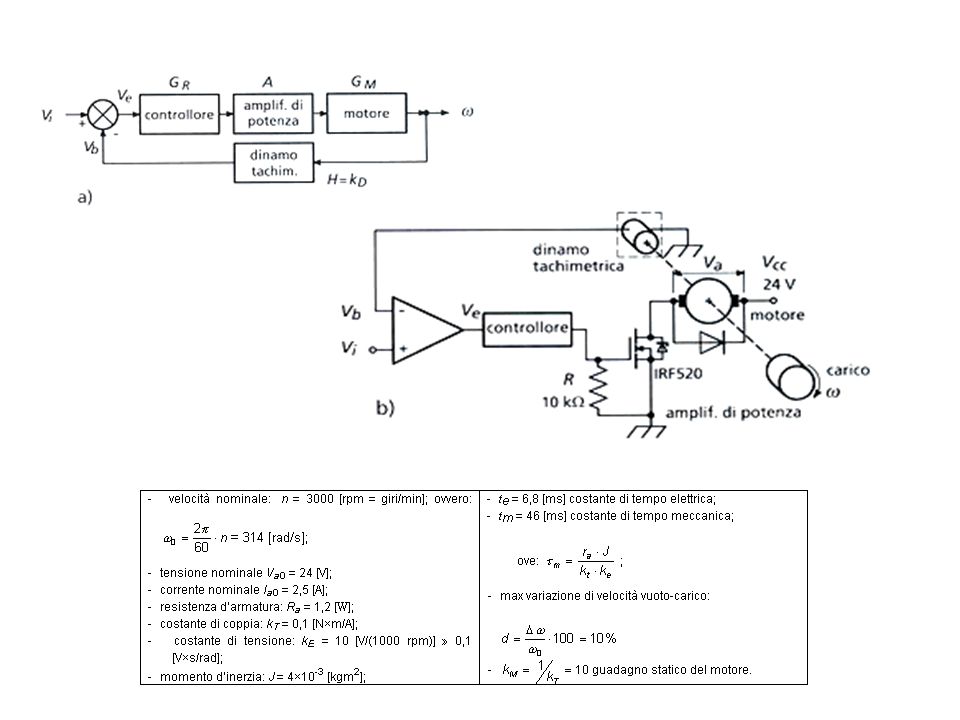
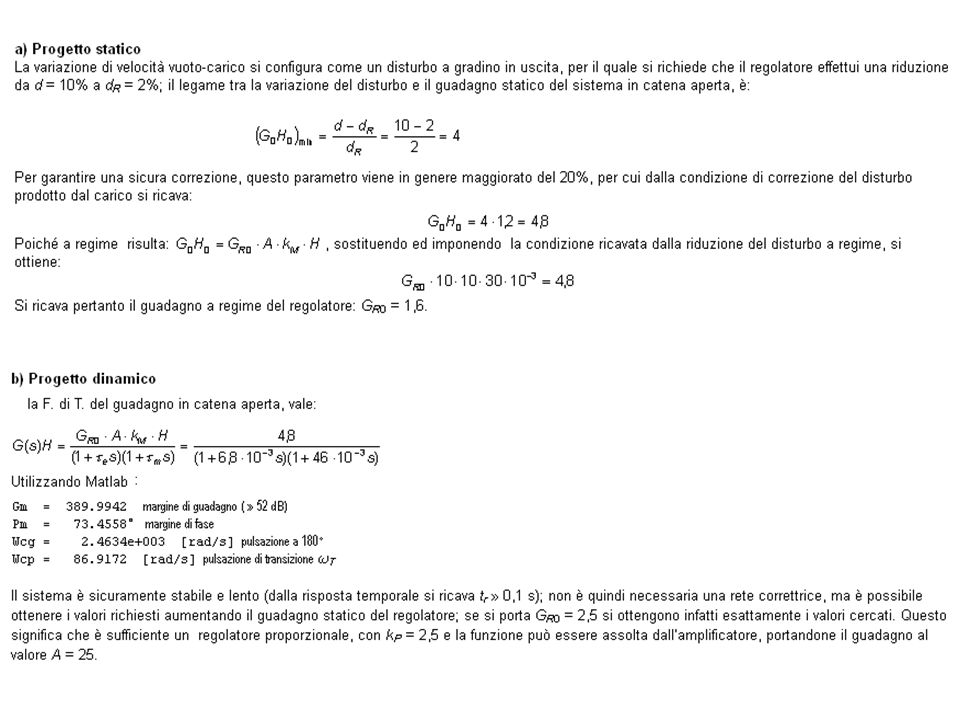
Le esigenze cui deve soddisfare il controllo di velocità, sono:
2 Si realizzi il controllo di velocità di un piccolo motore in continua per mezzo di un sistema avente lo schema a blocchi in seguitoriportato formato da: un sistema amplificatore A, che provvede a trasformare la tensione errore ve nella tensione e potenza sufficiente al pilotaggio del motore. L’amplificatore ha poli di valore molto più elevato di quelli del motore, pertanto lo si considera una costante numerica A = 10; un motore in continua le cui caratteristiche commerciali sono riportate di seguito l’elemento di reazione H è una dinamo tachimetrica, con funzione di trasferimento costante kD = 30×10-3 [V/(rad/s)]; il segnale di riferimento vi(t) può variare nel campo 0 ÷ 10 [V] per coprire l’intero campo di regolazione del motore. Le esigenze cui deve soddisfare il controllo di velocità, sono: 1. l’errore di velocità vuoto-carico deve ridursi da d = 10% nominale a dR = 2% con il regolatore; 2. il margine di fase deve risultare 60°; 3. il tempo di salita deve risultare tr = 0,05 s.
]; il segnale di riferimento vi(t) può variare nel campo 0 ÷ 10 [V] per coprire l’intero campo di regolazione del motore. Le esigenze cui deve soddisfare il controllo di velocità, sono: 1. l’errore di velocità vuoto-carico deve ridursi da d = 10% nominale a dR = 2% con il regolatore; 2. il margine di fase deve risultare 60°; 3. il tempo di salita deve risultare tr = 0,05 s.")
Presentazioni simili