Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Cinematica differenziale
La cinematica differenziale caratterizza i legami tra le velocità dei giunti e le corrispondenti velocità lineari e angolare della configurazione del manipolatore. Tali legami sono espressi da una matrice di trasformazione, dipendente dalla configurazione del manipolatore, denominata Jacobiano geometrico. Per altra via se la postura dell’organo terminale è espressa facendo riferimento ad una rappresentazione in forma minima dello spazio operativo, è possibile calcolare lo Jacobiano direttamente, mediante operazione di differenziazione della funzione cinematica diretta rispetto alla variabile di giunto; lo Jacobiano che ne viene fuori è denominato Jacobiano analitico ed è in generale diverso da quello geometrico.

2
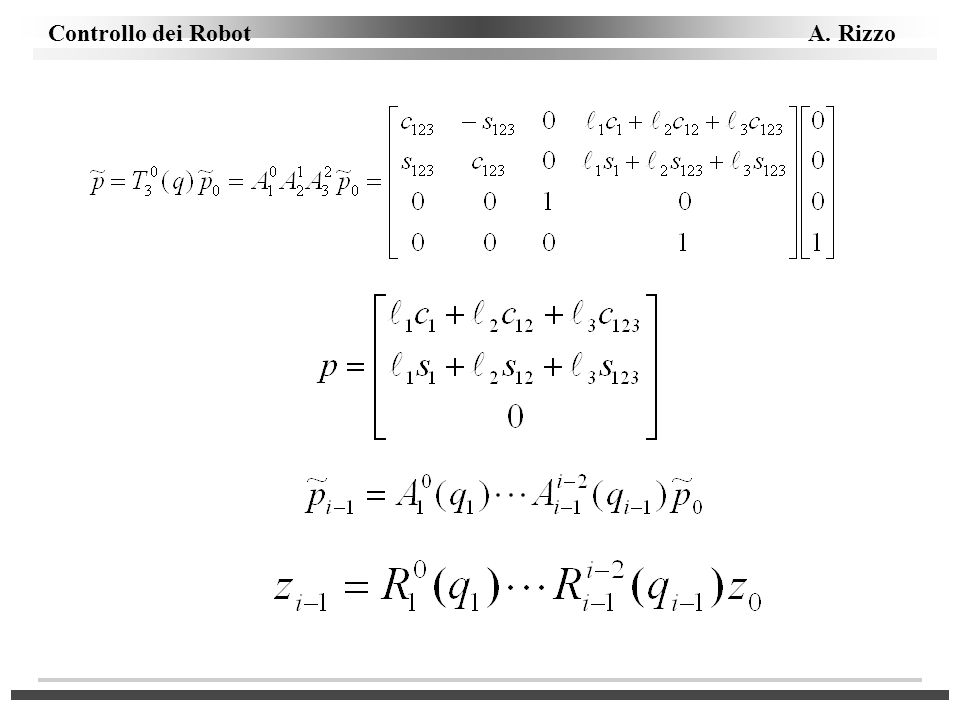
Jacobiano geometrico manipolatore a n gradi di mobilità
velocità lineare velocità angolare dell’organo terminale Jp rappresenta la matrice (3xn) relativa al contributo delle velocità dei giunti alla velocità lineare dell’organo terminale, mentre Jo è la matrice (3xn) relativa al contributo delle velocità angolare dell’organo terminale Jacobiano geometrico del manipolatore: equazione cinematica differenziale del manipolatore
 relativa al contributo delle velocità dei giunti alla velocità lineare dell’organo terminale, mentre Jo è la matrice (3xn) relativa al contributo delle velocità angolare dell’organo terminale. Jacobiano geometrico del manipolatore: equazione cinematica differenziale del manipolatore.")
3
Derivata di una matrice di rotazione
Si supponga che la matrice di rotazione vari nel tempo, in altre parole R = R(t). Dalla proprietà di ortogonalità di R si ha la relazione R(t)RT(t) = I che, derivata rispetto al tempo, fornisce l’identità Poniamo : Antisimmetrica : Moltiplichiamo da destra ambo i membri dell’espressione di S(t) per R(t):
. Dalla proprietà di ortogonalità di R si ha la relazione R(t)RT(t) = I che, derivata rispetto al tempo, fornisce l’identità. Poniamo : Antisimmetrica : Moltiplichiamo da destra ambo i membri dell’espressione di S(t) per R(t):")
4
Interpretazione fisica
Si consideri un vettore p ed il vettore p(t) = R(t)p (osserviamo che il vettore p non dipende dal tempo). La derivata temporale di p(t) risulta: Dalla meccanica classica risulta che la velocità di un vettore applicato si esprime nella forma: dove (t) rappresenta la velocità angolare della terna R(t) all’istante di tempo t rispetto alla terna di riferimento. Uguagliando le due espressioni si osserva che la matrice S(t) esprime il prodotto vettoriale tra il vettore velocità angolare (t) ed il vettore R(t)p.
 = R(t)p (osserviamo che il vettore p non dipende dal tempo). La derivata temporale di p(t) risulta: Dalla meccanica classica risulta che la velocità di un vettore applicato si esprime nella forma: dove (t) rappresenta la velocità angolare della terna R(t) all’istante di tempo t rispetto alla terna di riferimento. Uguagliando le due espressioni si osserva che la matrice S(t) esprime il prodotto vettoriale tra il vettore velocità angolare (t) ed il vettore R(t)p.")
5
Velocità angolare (t) =[x, y, z]T S(t) = S((t)). y y’
P x’ y’ x p solidale a x’,y’ x’, y’ ruota con velocità angolare
![Velocità angolare (t) =[x, y, z]T S(t) = S((t)). y y’](http://slideplayer.it/slide/537562/1/images/5/Velocit%C3%A0+angolare+%EF%81%B7%28t%29+%3D%5B%EF%81%B7x%2C+%EF%81%B7y%2C+%EF%81%B7z%5DT+S%28t%29+%3D+S%28%EF%81%B7%28t%29%29.+y+y%E2%80%99.jpg "P. x’ y’ x. p solidale a x’,y’ x’, y’ ruota con. velocità angolare ")
6
Esempio Consideriamo la matrice di rotazione elementare intorno all’asse z: Supponiamo che vari nel tempo, calcoliamo la derivata rispetto al tempo di Rz((t)).
).")
7
quindi il vettore velocità angolare della terna ruotata rispetto alla terna base vale:

8
Composizione di velocità
se p1 è costante nel tempo (cioè fisso rispetto alla terna 1)
")
9
Velocità di un braccio Velocità Traslazionale
vi-1,i indica la velocità dell’origine della terna i rispetto all’origine della terna i – 1, espressa nella terna base La terna i è solidale al braccio (conv. DH)
")
10
Velocità angolare Derivando:

11
Velocità angolare Per l’ortogonalità delle matrici di rotazione si può ancora scrivere Osserviamo che per le matrici di rotazione vale la relazione, RS()RT = S(R), quindi:
RT = S(R), quindi:")
12
Composizione di velocità
Queste relazioni possono essere particolareggiate per giunti prismatici o rotoidali

13
Giunto prismatico Giunto rotoidale
i-1,i = 0 Giunto rotoidale

14
Calcolo dello Jacobiano
Giunto prismatico Giunto rotoidale

15
Calcolo dello jacobiano
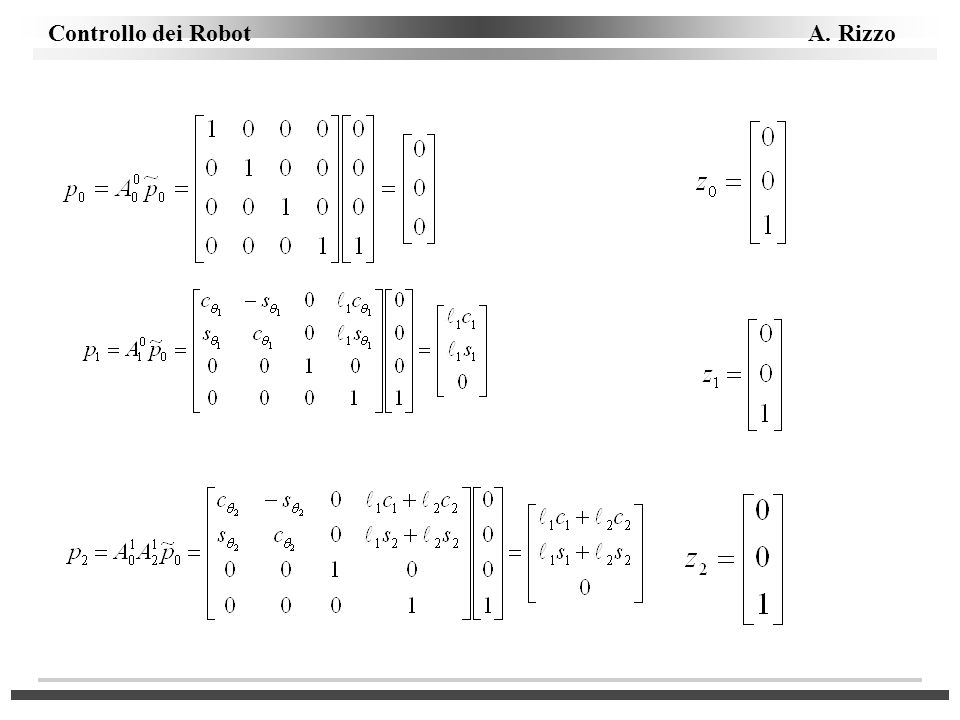
zi-1 è dato dalla terza colonna della matrice di rotazione e quindi z0 = [0, 0, 1]T Consente di selezionare la terza colonna

16
p è dato dai primi tre elementi della quarta colonna della matrice di trasformazione
pi-1 è dato dai primi tre elementi della quarta colonna della matrice di trasformazione Si osserva che lo Jacobiano dipende dalla terna rispetto alla quale viene espressa la velocità dell’organo terminale.

17
Esempio: Manipolatore a tre bracci
y3 x3 con i = 1, 2, 3

20
prodotto vettoriale tra due vettori P (Px, Py, Pz) e Q (Qx, Qy, Qz)
 e Q (Qx, Qy, Qz)")
21
Nel piano x-y :

22
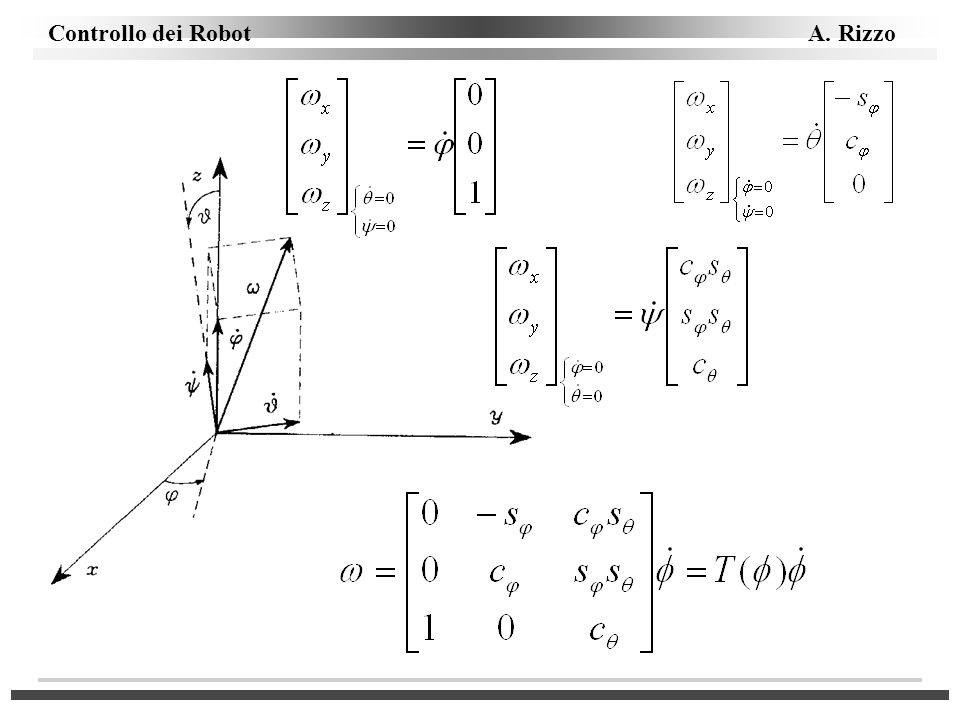
Jacobiano analitico : rappresentazione minima dell’orientamento
La derivata rispetto al tempo di non coincide, in generale, con il vettore velocità angolare definito in precedenza

23
Legame tra Jacobiano analitico e jacobiano geometrico

25
Singolarità di rappresentazione di .
Il determinante della matrice T è pari a -s, il che significa che la relazione non è invertibile per = 0, . Ciò significa che, sebbene ogni velocità di rotazione della terna possa essere espressa mediante un opportuno vettore di velocità angolare , esistono velocità angolari che non possono essere espresse mediante , quando l’orientamento della terna utensile impone s = 0. In questa situazione, infatti, le velocità angolari che possono essere descritte da sono vincolati ad avere componenti nelle direzioni ortogonali all’asse z tra di loro dipendenti . Gli orientamenti che annullano il determinante della matrice di trasformazione sono dette singolarità di rappresentazione di .

26
Significati fisici di w e di f
Da un punto di vista fisico il significato di w è più intuitivo di quello di f’ Tuttavia l’integrale di f’ corrisponde a f ed esprime quindi le variazioni impresse sugli angoli di Eulero per passare da un orientamento ad un altro, mentre l’integrale di w non ammette alcuna interpretazione fisica

27
Legame tra Jacobiano analitico e jacobiano geometrico
J = TA()JA
JA.")
28
Singolarità Cinematiche
Tutte quelle configurazioni, per le quali J diminuisce il suo rango sono chiamate singolarità cinematiche. La caratteristica delle singolarità e di notevole interesse per i seguenti motivi: a)Le singolarità rappresentano configurazioni in corrispondenza delle quali si ha una perdita di mobilità della struttura, in altre parole non è possibile imporre all’organo terminale leggi di moto arbitrarie. b)Quando la struttura è in una configurazione singolare, possono esistere infinite soluzioni al problema cinematico inverso c)Nell’intorno di una singolarità, velocità ridotte nello spazio operativo possono indurre velocità molto alte nello spazio dei giunti.
Le singolarità rappresentano configurazioni in corrispondenza delle quali si ha una perdita di mobilità della struttura, in altre parole non è possibile imporre all’organo terminale leggi di moto arbitrarie. b)Quando la struttura è in una configurazione singolare, possono esistere infinite soluzioni al problema cinematico inverso. c)Nell’intorno di una singolarità, velocità ridotte nello spazio operativo possono indurre velocità molto alte nello spazio dei giunti.")
29
Singolarità cinematiche
Singolarità ai confini dello spazio di lavoro raggiungibile che si presentano quando il manipolatore è tutto steso o tutto ripiegato su se stesso. Queste singolarità possono essere evitate. Singolarità all’interno dello spazio di lavoro raggiungibile che sono generalmente causate dall’allineamento di due o più assi di moto, in altre parole dall’assunzione di configurazioni particolari da parte dell’organo terminale. Queste costituiscono un problema serio in quanto, essendo all’interno dello spazio di lavoro, possono essere interessate da traiettorie pianificate nello spazio operativo.

30
Esempio det(J) = a1a2s2 il determinante si annulla per 2 = 0, , mentre 1 è influente ai fini delle determinazioni di posizioni singolari. Le due configurazioni trovate corrispondono ai casi in cui l’organo terminale del manipolatore è situato al confine esterno (2 = 0, rappresentato in figura) o interno (2 = ).
 o interno (2 = ).")
31
Analisi della ridondanza
v è da intendersi come il vettore (rx1) delle velocità dell’organo terminale necessarie per specificare il compito; J come la corrispondente matrice Jacobiana (rxn) estratta dallo Jacobiano geometrico; il vettore (nx1) della velocità dei giunti. Se r < n, il manipolatore risulta ridondante da un punto di vista cinematico ed esistono (n-r) gradi di mobilità ridondanti.
 delle velocità dell’organo terminale necessarie per specificare il compito; J come la corrispondente matrice Jacobiana (rxn) estratta dallo Jacobiano geometrico; il vettore (nx1) della velocità dei giunti. Se r < n, il manipolatore risulta ridondante da un punto di vista cinematico ed esistono (n-r) gradi di mobilità ridondanti.")
32
L’immagine di J è il sottospazio R(J) in che individua le velocità dell’organo terminale che possono essere generate dalle velocità di giunto, nella configurazione assegnata al manipolatore; Il nullo di J è il sottospazio N(J) in cui appartengono le velocità di giunto che non producono alcuna velocità all’organo terminale, nella configurazione assegnata al manipolatore.
 in cui appartengono le velocità di giunto che non producono alcuna velocità all’organo terminale, nella configurazione assegnata al manipolatore.")
33
Per un manipolatore ridondante quando N(J) 0
Se lo Jacobiano è a rango pieno, si ha: dim(R(J)) = r dim(N(J)) = n – r e l’immagine di J ricopre l’intero spazio . Al contrario, se lo Jacobiano degenera in una singolarità, la dimensione dell’immagine diminuisce e, allo stesso tempo, la dimensione del nullo aumenta, in quanto vale la relazione: dim(R(J)) + dim(N(J)) = n (n è la dimensione dello spazio dei giunti) indipendentemente dal rango della matrice J. Per un manipolatore ridondante quando N(J) 0 Data Soluzione della R(P) N(J) Vettore arbitrario
) = r dim(N(J)) = n – r. e l’immagine di J ricopre l’intero spazio . Al contrario, se lo Jacobiano degenera in una singolarità, la dimensione dell’immagine diminuisce e, allo stesso tempo, la dimensione del nullo aumenta, in quanto vale la relazione: dim(R(J)) + dim(N(J)) = n (n è la dimensione dello spazio dei giunti) indipendentemente dal rango della matrice J. Per un manipolatore ridondante quando N(J) 0. Data. Soluzione della. R(P) N(J) Vettore arbitrario.")
34
Inversione della cinematica differenziale

35
Manipolatori ridondanti
Un manipolatore viene detto ridondante da un punto di vista cinematico quando possiede un numero di gradi di mobilità maggiore del numero di variabili necessarie alla caratterizzazione di un determinato compito. Detto in termini di spazi sopra introdotti un manipolatore è intrinsecamente ridondante quando la dimensione dello spazio operativo è minore della dimensione dello spazio dei giunti (m < n).
.")
36
Esempio Se non si fosse interessati all’orientamento, si ha x = [px, py]T e vi è quindi ridondanza cinematica r < m.
![Esempio Se non si fosse interessati all’orientamento, si ha x = [px, py]T e vi è quindi ridondanza cinematica r < m.](http://slideplayer.it/slide/537562/1/images/36/Esempio+Se+non+si+fosse+interessati+all%E2%80%99orientamento%2C+si+ha+x+%3D+%5Bpx%2C+py%5DT+e+vi+%C3%A8+quindi+ridondanza+cinematica+r+%3C+m..jpg "Esempio Se non si fosse interessati all’orientamento, si ha x = [px, py]T e vi è quindi ridondanza cinematica r < m.")
37
Cinematica inversa dei manipolatori ridondanti
Se il manipolatore è ridondante (r < n), lo Jacobiano è una matrice rettangolare bassa e si pone il problema significativo di trovare le soluzioni – ne esisterà più di una – all’equazione . Un possibile metodo di soluzione è quello di formulare il problema d’ottimo vincolato. Minimizzare Con il vincolo dove W è un’opportuna matrice (nxn) di peso, simmetrica e definita positiva.
, lo Jacobiano è una matrice rettangolare bassa e si pone il problema significativo di trovare le soluzioni – ne esisterà più di una – all’equazione . Un possibile metodo di soluzione è quello di formulare il problema d’ottimo vincolato. Minimizzare. Con il vincolo. dove W è un’opportuna matrice (nxn) di peso, simmetrica e definita positiva.")
38
Metodo dei moltiplicatori di Lagrange
funzionale di costo modificato dove è un vettore incognito (rx1) di moltiplicatori Soluzione :
 di moltiplicatori. Soluzione :")
39
Sostituendo in Caso particolare: la matrice di peso W coincide con la matrice identità I Pseudo inversa destra La soluzione ottenuta è quella che minimizza localmente la norma della velocità ai giunti.

40
soluzione che minimizza
OSSERVAZIONI soluzione che minimizza In generale : Dove : Appartiene al

41
Scelta: dove È una qualunque velocità di giunto l’espressione trovata precedentemente è anche quella che ci assicura il minor discostamento di da

42
velocità di giunto in corrispondenza della quale e solo in corrispondenza della quale si ha una variazione di velocità di giunto in corrispondenza della quale non può aversi variazione di

43
Minimizzazione di obiettivi
Se riusciamo tramite ad imporre: Potremo avvicinarci ad un minimo assoluto per H

44
Il primo addendo è sicuramente negativo, mentre sul segno del secondo non si può dire niente.

45
Esempi di task

46
Inversione cinematica
Deriva numerica E’ necessario, nella definizione di un algoritmo di inversione, far dipendere da e in modo tale che l’equazione differenziale precedente produca un e(t) convergente (asintoticamente) a zero
 convergente (asintoticamente) a zero.")
47
(Pseudo-)inversa dello Jacobiano
Per un manipolatore ridondante:

48
Trasposta dello Jacobiano
Scegliamo Per un riferimento costante ( ) risulta definita negativa.
 risulta definita negativa.")
50
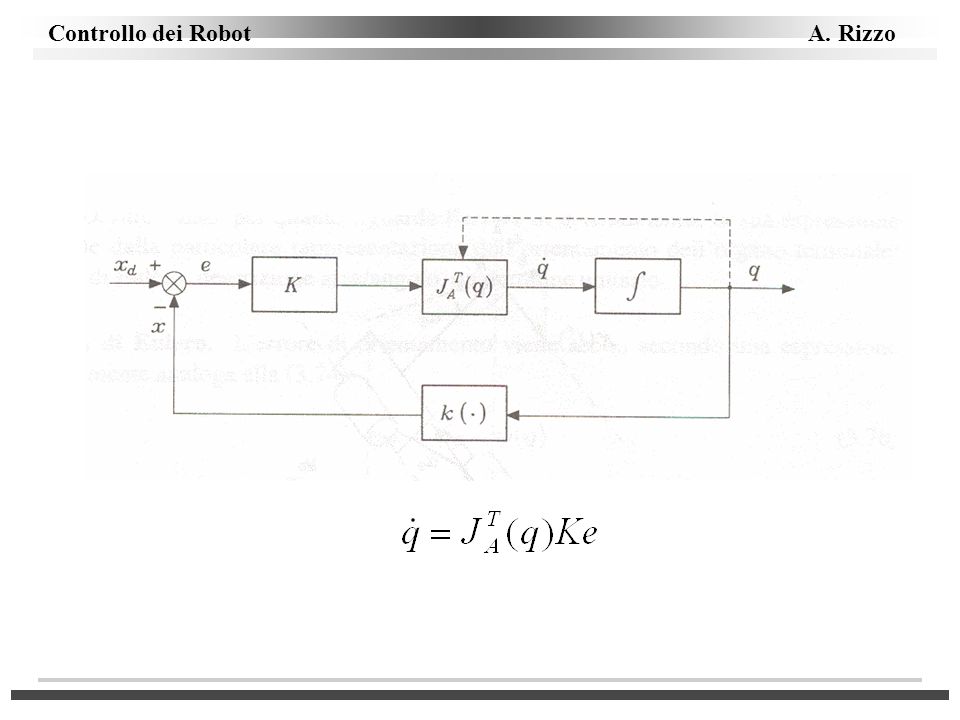
Trasposta dello Jacobiano
Richiede solo il computo di funzioni cinematiche dirette Se il riferimento non è nullo la derivata della funzione di Lyapunov può essere resa definita negativa tramite un termine dipendente dalla (pseudo)inversa dello jacobiano (perdo i vantaggi) In ogni caso l’errore di inseguimento si può mantere limitato. Esso sarà tanto più piccolo quanto più grande è la norma della matrice dei guadagni K Tuttavia l’implementazione a tempo discreto dell’algoritmo impone limiti superiori della norma di K
inversa dello jacobiano (perdo i vantaggi) In ogni caso l’errore di inseguimento si può mantere limitato. Esso sarà tanto più piccolo quanto più grande è la norma della matrice dei guadagni K. Tuttavia l’implementazione a tempo discreto dell’algoritmo impone limiti superiori della norma di K.")
Presentazioni simili






, una sua funzione ( es. y = f(x) ) e la.>")

 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")










 Cenni di teoria dell’elasticità, sforzi e deformazioni, l’equazione delle onde elastiche.>")