Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Sistemi innovativi in zootecnia
CORSO LAUREA MAGISTRALE IN SCIENZE DELLA PRODUZIONE ANIMALE Sistemi innovativi in zootecnia Supporti avanzati per la gestione dell’allevamento (corso SUPAG) Massimo Lazzari Dipartimento di Scienze e tecnologie Veterinarie per la Sicurezza Alimentare Università degli Studi di Milano
 Massimo Lazzari. Dipartimento di Scienze e tecnologie Veterinarie per la Sicurezza Alimentare. Università degli Studi di Milano.")
2
Automazione della navigazione basata su GPS
CORSO LAUREA MAGISTRALE IN SCIENZE DELLA PRODUZIONE ANIMALE Automazione della navigazione basata su GPS Massimo Lazzari Dipartimento di Scienze e tecnologie Veterinarie per la Sicurezza Alimentare Università degli Studi di Milano

3
Agrimensura in vigneto

4
Trapiantatrice di barbatelle a guida GPS (differenziale)
")
5
Misura errori

6
Risultati: V = 4 km/h

7
Allineamento longitudinale

8
2 - Guida assistita trattore

9
y = scostamento laterale da traiettoria ideale Ψ = direzione trattore
δ = angolo sterzatura y = scostamento laterale da traiettoria ideale Ψ = direzione trattore L = passo = centro istantanea rotazione

10
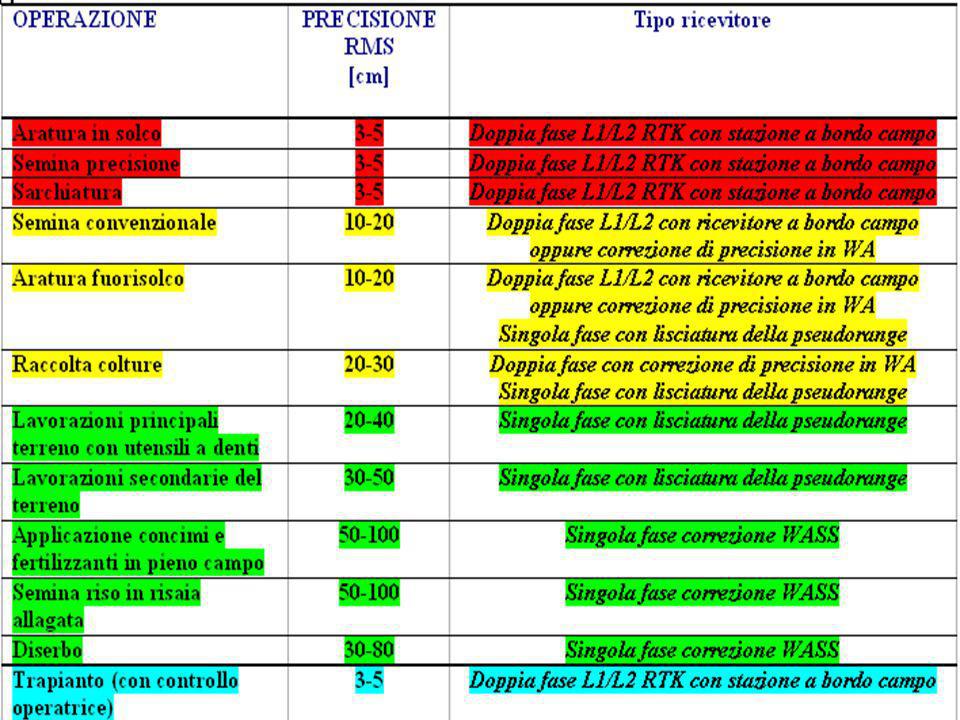
Requisiti precisione e accuratezza delle principali operazioni agricole

11
Guida assistita: il sistema ARVAnav

13
Misura errori

14
Risultati guida manuale assistita

15
Semina riso in risaia allagata Concimazione pieno campo
Possibili impieghi Semina riso in risaia allagata Concimazione pieno campo Diserbo

16
Misura aree con ARVAnav

17
Risultati

18
3 - Guida semi automatica trattore

19
BREVETTO 1925 Willrodt E’ UN POCO ……

20
….IL SOGNO DEL MECCANICO AGRARIO

21
………. FUNZIONA!!!!!!

22
Diagramma di flusso

23
Prototipo 1 antenna di posizionamento;
3 4 2 antenna di posizionamento; sensore di rilevazione della posizione dello sterzo; computer di elaborazione dati con ricevitore integrato; attuatore elettrico montato direttamente al volante.

24
Componente 1 - antenna

25
Componente 2 sensore sterzo

26
Componente 3 – computer con ricevitore integrato

27
Componente 4 – motore elettrico attuatore collegato con frizione al volante

28
Prototipo 2 antenna di posizionamento;
1 3 4 2 antenna di posizionamento; sistema di rilevazione della posizione dello sterzo; sistema di elaborazione dati con ricevitore integrato; elettrovalvola che agisce sullo sterzo idraulico

29
Verso la fine del ‘700 con la rivoluzione industriale si ebbe un primo impulso allo sviluppo di nuove macchine Prove: ….. in corso!!!

30
Prove: ….. in corso!!!

31
Ricevitori in prova: 1 – unico, singola frequenza L1, con correzione differenziale EGNOS, lisciatura della pseudorange con impiego della fase (senza fissare l’ambiguità), a precisione decimetrica (RMS = 0,24 m su base giornaliera; 2 – master + rover, in doppia frequenza, L1/L2, a precisione centimetrica
, a precisione decimetrica (RMS = 0,24 m su base giornaliera; 2 – master + rover, in doppia frequenza, L1/L2, a precisione centimetrica")
32
Primi risultati: prototipo 2

34
Primi risultati: prototipo 1

35
Primi risultati: prototipo 2 precisione

36
Primi risultati: prototipo 2 accuratezza

37
3 - Guida automatica trattore

38
3B6 MECCANICA AGRARIA -TORINO

40
LA GESTIONE AUTOMATICA DELLA MANDRIA

41
LA GESTIONE AUTOMATICA DELLA MANDRIA

42
LA GESTIONE AUTOMATICA DELLA MANDRIA

43
LA GESTIONE AUTOMATICA DELLA MANDRIA

Presentazioni simili



 Massimo Lazzari Dipartimento di Scienze e tecnologie Veterinarie.>")

>")



 Esonerate dai controlli>")




 Massimo Lazzari Dipartimento di Scienze.>")

>")



 Massimo Lazzari Dipartimento di Scienze e tecnologie Veterinarie.>")
 Massimo Lazzari Dipartimento di Scienze.>")