Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Visione Artificiale La visione del robot può essere definita come il processo di estrazione, caratterizzazione e interpretazione delle informazioni provenienti dalle immagini di un mondo tridimensionale. La percezione è il processo che fornisce un’immagine visiva. La preelaborazione si occupa di tecniche come la riduzione del rumore e il miglioramento dei particolari. La segmentazione è il processo che divide le immagini in oggetti di interesse. La descrizione tratta il calcolo delle caratteristiche (per esempio dimensioni, forme) utilizzabili per differenziare un tipo di oggetto da un altro. Il riconoscimento è il processo che identifica questi oggetti. L’interpretazione conferisce un significato agli oggetti riconosciuti.
 utilizzabili per differenziare un tipo di oggetto da un altro. Il riconoscimento è il processo che identifica questi oggetti. L’interpretazione conferisce un significato agli oggetti riconosciuti.")
2
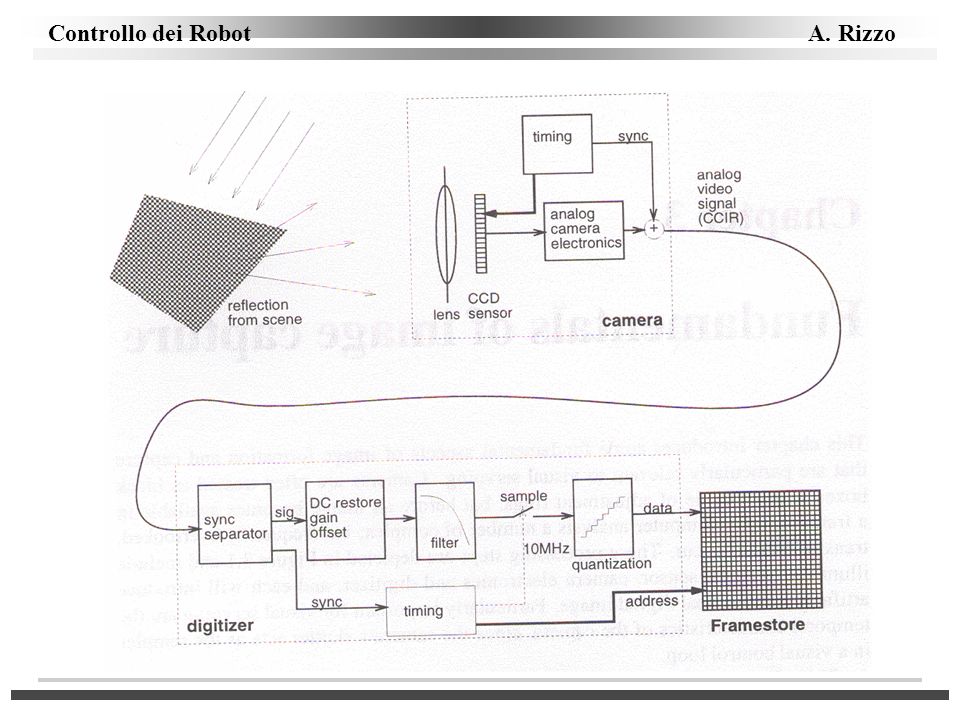
Acquisizione delle immagini (Percezione)
Telecamere TUBO VIDICON

3
Sensori CCD Sensori lineari. Il componente di base di un CCD lineare consiste in una riga di elementi sensibili di silicio, detti fotoelementi. I fotoni dell’immagine attraversano una struttura di Gate di silicio policristallino trasparente e vengono assorbiti dal cristallo di silicio, creando così coppie lacune – elettroni. I fotoelettroni risultanti sono raccolti nei fotoelementi e l’entità delle carica raccolta da ogni fotoelemento è proporzionale all’intensità luminosa in quel punto. Sensori di area. I sensori di area sono simili ai sensori lineari, con la differenza che i fotoelementi sono disposti in forma matriciale e che esiste un registro di trasferimento tra le colonne dei fotoelementi

4
Sensori CCD

6
Standard video CCIR 625 righe per quadro - 25 quadri al secondo (Europa, Australia) RS righe per quadro - 30 quadri al secondo (USA, Giappone)
")
7
Immagine digitale Digitalizzazione delle coordinate spaziali (x, y)= campionamento di immagine Digitalizzazione in ampiezza = quantizzazione dell’intensità o dei livelli di grigio

8
Esempi : Campionamento di immagini
128 x 128 256 x 256 32 x 32 64 x 64

9
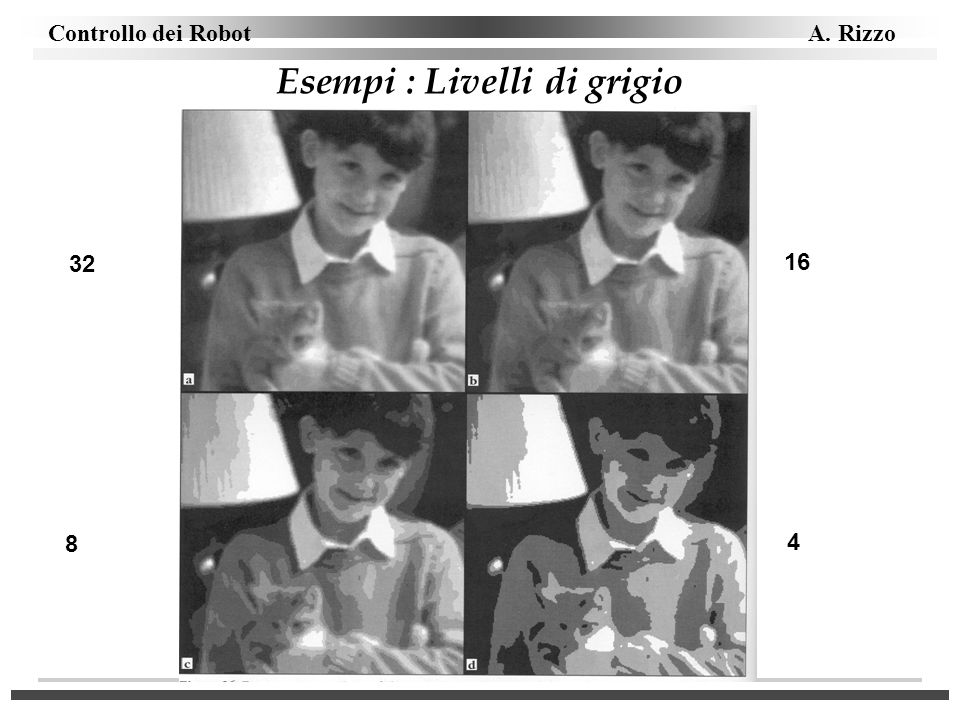
Esempi : Livelli di grigio
32 16 8 4
10
Tecniche di illuminazione

11
Geometria dell’immagine
Traslazione

12
Trasformazione di scala

13
Rotazione Rk(-) = RkT() con k = x, y, z
 = RkT() con k = x, y, z")
14
Trasformazione di prospettiva

15
Matrice di trasformazione della prospettiva

16
Traformazione inversa wh = P-1ch,

17
Indeterminazione del punto
Supponiamo che un dato punto dell’immagine abbia coordinate (x0, y0, 0), dove lo 0 nella posizione di z sta ad indicare che ci stiamo muovendo nel piano z = 0. Il punto d’immagine di coordinate (x0, y0) corrisponde all’insieme dei punti 3D allineati che giacciono sulla retta che passa per i punti (x0, y0, 0) e (0, 0,).
, dove lo 0 nella posizione di z sta ad indicare che ci stiamo muovendo nel piano z = 0. Il punto d’immagine di coordinate (x0, y0) corrisponde all’insieme dei punti 3D allineati che giacciono sulla retta che passa per i punti (x0, y0, 0) e (0, 0,).")
18
Soluzione La ricostruzione di un punto 3D dall’immagine bidimensionale richiede la conoscenza di almeno una delle coordinate del punto nel sistema di riferimento.

19
Modello della telecamera
Questa equazione (e la sua inversa) caratterizza la formazione di un’immagine attraverso la proiezione di punti 3D sul piano della telecamera Questo modello si basa sulla considerazione che il sistema di coordinate della telecamera e quello di riferimento coincidano Nella realtà tali SDR possono essere distinti
 caratterizza la formazione di un’immagine attraverso la proiezione di punti 3D sul piano della telecamera. Questo modello si basa sulla considerazione che il sistema di coordinate della telecamera e quello di riferimento coincidano. Nella realtà tali SDR possono essere distinti.")
20
Modello della telecamera
(1) Spostamento w0 del centro dell’origine della telecamera; (2) panoramica dell’asse x, (3) inclinazione dell’asse z; (4) spostamento r del piano dell’immagine rispetto al centro del giunto, dove è appoggiata la telecamera e sul quale può ruotare.
 Spostamento w0 del centro dell’origine della telecamera; (2) panoramica dell’asse x, (3) inclinazione dell’asse z; (4) spostamento r del piano dell’immagine rispetto al centro del giunto, dove è appoggiata la telecamera e sul quale può ruotare.")
21
(1) spostamento del centro dell’origine della telecamera;
(2) panoramica dell’asse x, (3) inclinazione dell’asse z; (4) spostamento del piano dell’immagine rispetto al centro del giunto, dove è appoggiata la telecamera e sul quale può ruotare.
 panoramica dell’asse x, (3) inclinazione dell’asse z; (4) spostamento del piano dell’immagine rispetto al centro del giunto, dove è appoggiata la telecamera e sul quale può ruotare.")
22
Trasformazione di prospettiva
ch = PCRGwh

23
Calibrazione della telecamera
ch = Awh A = PCRG

24
Il procedimento di calibrazione consiste nei seguenti passi:
dove si è tralasciato lo sviluppo di ch3 in quanto è relativo a z. Il procedimento di calibrazione consiste nei seguenti passi: Ottenere m 6 punti di riferimento in coordinate note (Xi, Yi, Zi) con i = 1, 2, 3, …, m (vi sono due equazioni che comprendono le coordinate di due punti, cosicché sono necessari almeno sei punti). Ricavare la rappresentazione di quei punti con la telecamera, in una data posizione, per ottenere i corrispondenti punti immagine (xi, yi), i = 1, 2, 3, …, m. Usare questi risultati ricavati, nel sistema sopra, per trovare i coefficienti incogniti.
 con i = 1, 2, 3, …, m (vi sono due equazioni che comprendono le coordinate di due punti, cosicché sono necessari almeno sei punti). Ricavare la rappresentazione di quei punti con la telecamera, in una data posizione, per ottenere i corrispondenti punti immagine (xi, yi), i = 1, 2, 3, …, m. Usare questi risultati ricavati, nel sistema sopra, per trovare i coefficienti incogniti.")
25
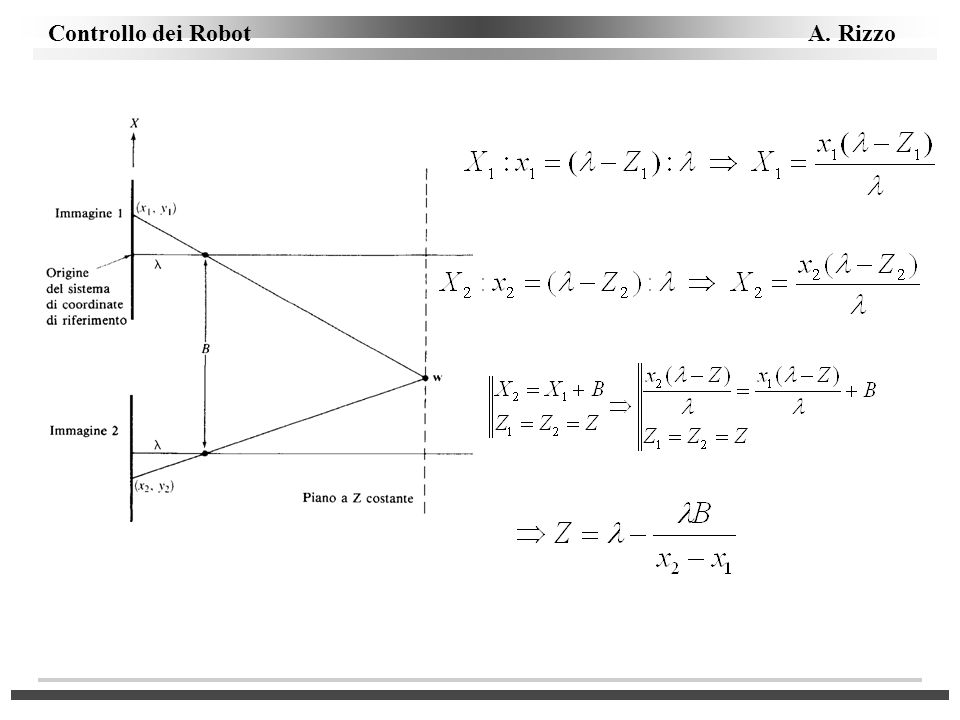
Visione stereoscopica

27
Preelaborazione Relazioni di base tra i pixel
Vicini di un pixel Vicini orizzontali e verticali N4(p). vicini diagonali ND(p) Vicini orizzontali verticali e diagonali N8(p).
![]()
28
Connettività Dato un insieme di valori V di intensità di pixel, vogliamo creare delle sequenze connesse (di pixel vicini) con intensità appartenente a V 4 - connettività. Due pixel p e q di valore appartenente a V sono 4 - connessi se q è nell'insieme N4(p). 8 - connettività. Due pixel p e q di valore appartenete a V sono 8 - connessi se q è nell'insieme N8(p). m - connettività (connettività mista). Due pixel p e q con valore appartenente a V sono m - connessi se: (a) q è in N4(p), oppure (b) q è in ND(p) e l'insieme N4(p) N4(q) è vuoto.
 con intensità appartenente a V. 4 - connettività. Due pixel p e q di valore appartenente a V sono 4 - connessi se q è nell insieme N4(p). 8 - connettività. Due pixel p e q di valore appartenete a V sono 8 - connessi se q è nell insieme N8(p). m - connettività (connettività mista). Due pixel p e q con valore appartenente a V sono m - connessi se: (a) q è in N4(p), oppure (b) q è in ND(p) e l insieme N4(p) N4(q) è vuoto.")
29
Misure di distanza Dati i pixel p, q e z di coordinate (x, y), (s, t) e (u, v), diciamo che D è una funzione della distanza o metrica se: D(p, q) 0 (D(p, q) = 0 se e solo se p = q). D(p ,q) = D(q, p) D(p, z) D(p, q) + D( q, z) La distanza euclidea tra due pixel è definita come:
![]()
30
La distanza tra gli isolati tra p e q è definita dalla regola:
La distanza della scacchiera tra p e q è definita dalla regola:

31
Preelaborazione nel dominio spaziale
g(x, y) = h[f(x, y)] f l’immagine in ingresso, g è l’immagine risultante (preelaborata) e h è un operatore su f, definito in un intorno di (x,y)
 = h[f(x, y)] f l’immagine in ingresso, g è l’immagine risultante (preelaborata) e h è un operatore su f, definito in un intorno di (x,y)")
32
Maschere di convoluzione

33
Metodi nel dominio della frequenza
Trasformata bidimensionale di Fourier

34
Filtraggio Media degli intorni
Filtraggio mediano (evita di sfumare i margini e altri particolari netti) Media di più immagini g(x, y) = f(x, y) + n(x, y) Filtraggio binario
 Media di più immagini g(x, y) = f(x, y) + n(x, y) Filtraggio binario.")
35
Esempi di filtraggio Immagine Immagine originale alterata Filtraggio
mediano 5x5 Media degli intorni 5x5

36
Filtraggio Binario Riempie piccoli (un pixel) buchi in aree per il resto scure Riempie piccole tacche in segmenti rettilinei Elimina gli 1 (scuro) isolati Elimina piccole protuberanze lungo segmenti rettilinei Ripristina i punti mancanti degli angoli
![]()
37
Esempio

38
Equalizzazione dell’istogramma
r = intensità dei pixel in un'immagine 0 r 1 s = T(r) T(r) è una funzione a un solo valore, monotona crescente nell'intervallo 0 T(r) 1 0 T(r) 1 per 0 r 1
 T(r) è una funzione a un solo valore, monotona crescente nell intervallo 0 T(r) 1. 0 T(r) 1 per 0 r 1.")
39
Funzione densità di probabilità
Immagine scura Immagine chiara s = T(r) Dopo una trasformazione
 Dopo una trasformazione.")
40
Equalizzazione dell’istogramma
Scegliamo funzione di distribuzione cumulativa di pr(r) Questo risultato è indipendente dalla funzione di trasformazione inversa T-1 La PDF risultante è piatta, indipendentemente dalla PDF di partenza Tale risultato è spesso ideale in quanto bilancia la distribuzione delle intensità
 Questo risultato è indipendente dalla funzione di trasformazione inversa T-1. La PDF risultante è piatta, indipendentemente dalla PDF di partenza. Tale risultato è spesso ideale in quanto bilancia la distribuzione delle intensità.")
41
Immagini digitali 0 rk 1 e j = 0, 1, 2, …, L - 1
L è il numero dei livelli (colori) discreti d'intensità pr(rk) è una stima della probabilità dell'intensità rk nk è il numero delle volte che questa intensità appare nell'immagine n è il numero complessivo dei pixel dell'immagine
 discreti d intensità. pr(rk) è una stima della probabilità dell intensità rk. nk è il numero delle volte che questa intensità appare nell immagine. n è il numero complessivo dei pixel dell immagine.")
42
Un diagramma di pr(rk) in funzione di rk è solitamente chiamato istogramma e la tecnica usata per ottenere un istogramma uniforme è conosciuta con il nome di equalizzazione o linearizzazione dell'istogramma. 0 rk 1 e k = 0, 1, 2, …, L - 1

43
Esempio

44
Miglioramento locale fattore di guadagno locale
m(x, y) e (x, y) rappresentano la media dell’intensità e la deviazione standard calcolate in un intorno con centro in (x, y), M è la media totale di f(x, y) e k è una costante nell’intervallo indicato. È importante mettere in evidenza che A, m e sono quantità variabili che dipendono da un intorno predefinito di (x, y).
 e (x, y) rappresentano la media dell’intensità e la deviazione standard calcolate in un intorno con centro in (x, y), M è la media totale di f(x, y) e k è una costante nell’intervallo indicato. È importante mettere in evidenza che A, m e sono quantità variabili che dipendono da un intorno predefinito di (x, y).")
45
Rilevazione dei contorni

46
Operatori a gradiente

47
Operatori a gradiente

48
Immagini binarie Operatore di Laplace

49
Sogliatura Soglia singola Soglie multiple

50
Segmentazione La segmentazione è il processo che suddivide una scena in oggetti d’interesse. discontinuità : ricerca dei contorni similitudine : sogliatura e accrescimento delle regioni

51
Collegamento delle estremità e ricerca dei contorni
Analisi locale Valutati in un intorno di (x,y) Due pixel sono simili (e quindi fanno parte del contorno dello stesso oggetto) se soddisfano le condizioni precedenti
 Due pixel sono simili (e quindi fanno parte del contorno dello stesso oggetto) se soddisfano le condizioni precedenti.")
52
Esempio

53
Analisi globale con la trasformata di Hough
Ricerca di linee rette in una immagine contenente n punti Linee rette Confronti !!! yi = axi + b Spazio dei parametri

54
xcos(i) + ysen(i) =i
Celle accumulatrici A(a, b) = A(a, b) + 1 Se suddividiamo a e b in K parti il problema assume complessità lineare nK Problema: rette verticali ! Rappresentazione polare xcos(i) + ysen(i) =i In generale g(x, c) = 0,
 = A(a, b) + 1. Se suddividiamo a e b in K parti il problema assume complessità lineare nK. Problema: rette verticali ! Rappresentazione polare. xcos(i) + ysen(i) =i. In generale g(x, c) = 0,")
55
Esempio

56
Limitazione tramite soglia
p(x, y) rappresenta alcune proprietà locali misurate in un intorno di detto punto Se T dipende solo da f(x, y) la soglia è detta globale. Se T dipende sia da f(x, y) sia da p(x, y), allora, la soglia è detta locale. Se, inoltre, T dipende anche dalla posizione (x, y) allora la soglia è detta dinamica. Le soglie globali trovano applicazione in situazioni in cui c’è una netta distinzione tra oggetti e sfondo e se l’illuminazione è relativamente uniforme.
 rappresenta alcune proprietà locali misurate in un intorno di detto punto. Se T dipende solo da f(x, y) la soglia è detta globale. Se T dipende sia da f(x, y) sia da p(x, y), allora, la soglia è detta locale. Se, inoltre, T dipende anche dalla posizione (x, y) allora la soglia è detta dinamica. Le soglie globali trovano applicazione in situazioni in cui c’è una netta distinzione tra oggetti e sfondo e se l’illuminazione è relativamente uniforme.")
57
Scelta della soglia ottimale
p(z) = P1p1(z) + P2p2(z) istogramma bimodale P1 e P2 probabilità a priori
 = P1p1(z) + P2p2(z) istogramma bimodale. P1 e P2 probabilità a priori.")
58
È noto dalla teoria delle decisioni che l’errore che si commette nell’attribuire un pixel di colore chiaro ad uno di colore scuro, e viceversa, è minimizzato se si usa la seguente regola: dato un pixel con intensità z, sostituiamo quel valore di z nelle due funzioni costruite sopra. Classificheremo allora il pixel come valore chiaro (oggetto) se d1(z) > d2(z) o come pixel scuro (sfondo) se d1(z) < d2(z). La soglia ottimale è quindi quel valore di z (z = T) per cui vale d1(z) = d2(z). P1p1(T) = P2p2(T).
![]()
59
Soglie basate sui contorni

60
Segmentazione orientata alle regioni
Poniamo che R rappresenti l’intera regione dell’immagine. Possiamo vedere la segmentazione come un processo che suddivida R in n sottoregioni, R1, R2, …, Rn, cosicché:

61
Accrescimento di regioni
usati come seme T=3 T=8

62
Suddivisione e fusione di regioni

63
Uso del movimento Immagine differenza

64
Descrizione Il problema della descrizione nel processo visivo consiste nell’estrazione delle caratteristiche di un oggetto per consentire il riconoscimento. In teoria i descrittori dovrebbero essere indipendenti dalle dimensioni dell’oggetto, dalla posizione e dall’orientamento e dovrebbero contenere informazioni sufficienti per distinguere in modo inequivocabile un oggetto da un altro.

65
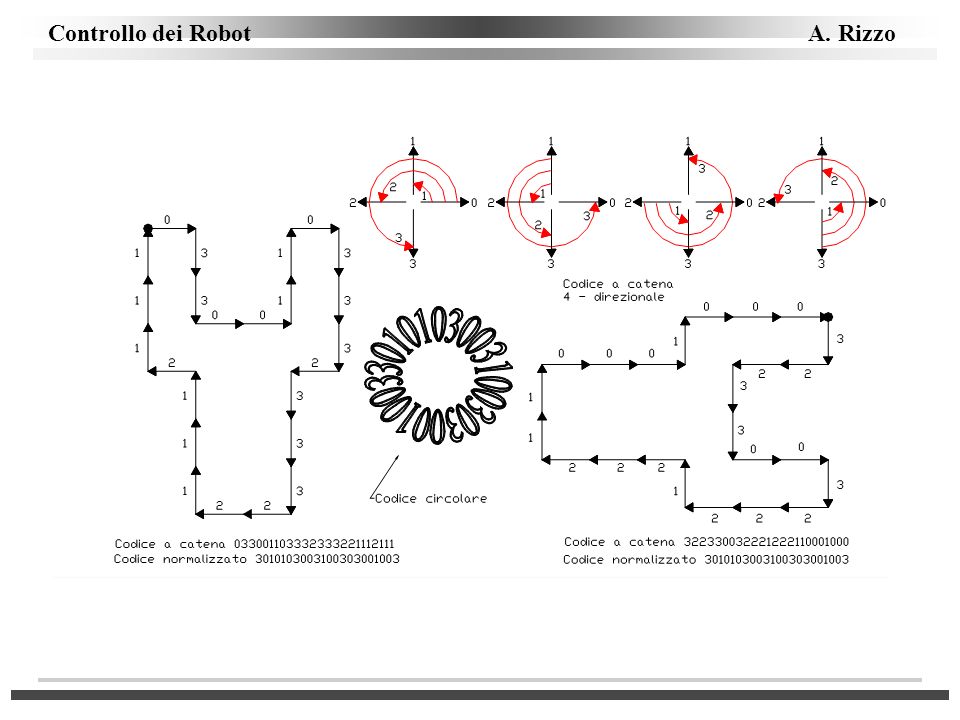
Descrittori dei contorni
Codici a catena

67
Forme caratteristiche

68
Descrittori di Fourier
Punto del contorno = x + jy Vantaggi: bastano pochi elementi della FFT per distinguere gli oggetti facile normalizzare rispetto a cambi scala, rotazioni, punto di partenza del contorno

69
Descrittori regionali
Area Assi maggiori e minori Eccentricità Perimetro Compattezza Tessitura

70
Riconoscimento x = (x1, x2, …, xn)T vettore di pattern
xi è l’i–esimo descrittore di un determinato oggetto Date M classi d’oggetti, rappresentate con 1, 2, …, M, il problema di base nel riconoscimento dei pattern con la teoria delle decisioni è identificare le M funzioni di decisione, d1(x), d2(x), …, dM(x) con la proprietà che la seguente relazione valga per ogni pattern x* appartenete alla classe i: di(x*) > dj(x*) j = 1, 2, …, M; j i.
, d2(x), …, dM(x) con la proprietà che la seguente relazione valga per ogni pattern x* appartenete alla classe i: di(x*) > dj(x*) j = 1, 2, …, M; j i.")
71
Assegneremo x* alla classe j se la distanza Dj(x*) è la più breve.
Esempio: Distanza Euclidea Assegneremo x* alla classe j se la distanza Dj(x*) è la più breve.
 è la più breve.")
Presentazioni simili




 A. A. 99/00 B>")




 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")









