Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
MECCANICA STATICA CINEMATICA DINAMICA

2
CINEMATICA DINAMICA STUDIO DEL MOTO DAL PUNTO DI VISTA GEOMETRICO
STUDIO DEL MOTO DAL PUNTO DI VISTA DELLE CAUSE PUNTO MATERIALE: punto matematico senza dimensione dimensioni piccole rispetto al sistema che si sta studiando

3
MOTO IN UNA DIMENSIONE Velocità media xf xi î x Vm ti tf t = 0 t x
tf - ti Vm = [L] [T] m s 10/3/06

4
Piano x-t x(t) equazione oraria posizione istante per istante x 1 n t x x(t) t1 tn xn x1 x1 t1 x2 t2 x3 t3 … xn tn t x t Vm = = tg

5
direzione data dalla retta
Velocità istantanea x tangente in P xi x3 x2 xf x t l i m Vi = dx dt = Q’’ Q’ Q x1 x2 P t3 t2 t1 t ti t3 t2 tf modulo = tg direzione data dalla retta del moto rettilineo

6
viP = tgP > 0 ViQ tgQ viR tgR = 0 viS tgS < 0
modulo vi = tg x xR xQ R S xS Q xP P S Q P t tS Parte da xP, arriva in xRdove si ferma e torna indietro

7
ACCELERAZIONE: variazione di v nel tempo
Accelerazione media v t = vf - vi î tf - ti am = [T] m s2 [L] Accelerazione istantanea v t l i m ai = d2x dt2 = dv dt d dx

8
Piano v-t v(t) velocità istante per istante v t P Q t v v(t) tP tQ vQ vP v1 t1 v2 t2 v3 t3 … vn tn v t am = = tg

9
14 10 06 02

12
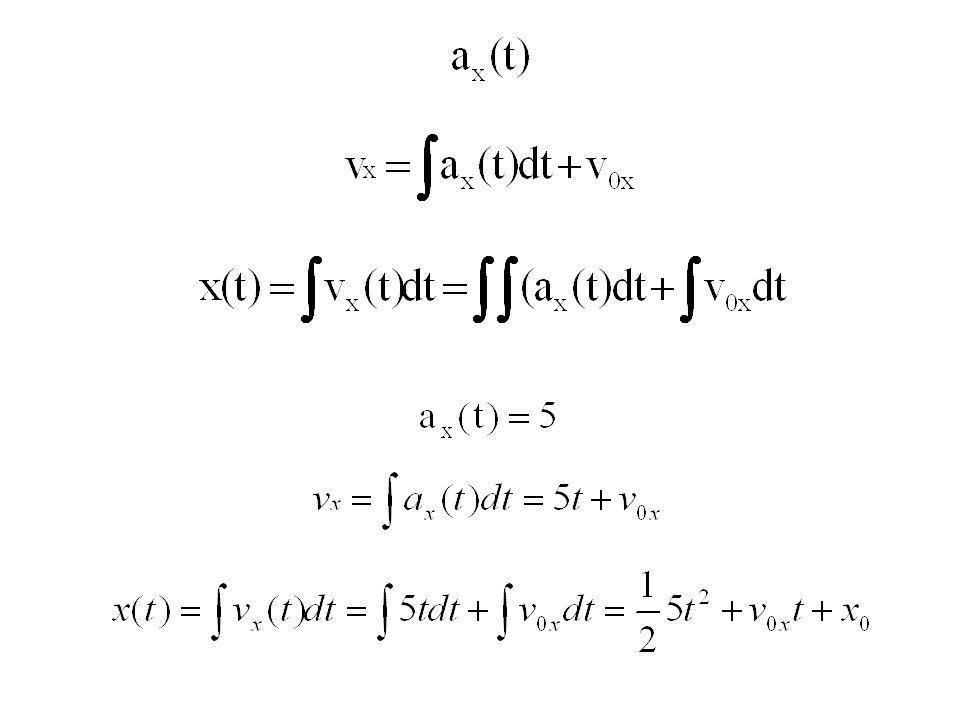
Moto uniformemente accelerato
ALCUNI ESEMPI Moto uniformemente accelerato java t x t a t v

13
Velocità funzione dello spazio

14
Velocità funzione dello spazio
se

15
Moto uniformemente accelerato

16
Moto rettilineo uniforme
x t a t v

17
MOTO IN DUE DIMENSIONI http://www.pv.infn.it/~altieri piano x-y
traiettoria x

18
Velocità vettoriale y x

19
Accelerazione vettoriale
y x

20
accelerazione tangenziale e radiale
y at a ar traiettoria ar at a x acc. tangenziale modulo velocità cambia acc radiale direzione velocità

21
Equazioni vettoriali y x

22
MOTO DEL PROIETTILE accelerazione g costante moto con traiettoria
verso il basso no resistenza aria moto con traiettoria parabolica

23
Lancio con velocità orizzontale

24
Il pacco lanciato dall’aereo

25
Lancio con velocità verticale

26
Lancio con velocità verticale

27
Lancio con velocità verticale
g java y traiettoria parabolica x gittata

28
la scimmia e la banana

29
si misura col dinamometro
DINAMICA forza cambia lo stato di quiete o di moto di un oggetto Forza: operativamente: si misura col dinamometro Figura Dinamometro E composizione forze

30
Principio di inerzia In assenza di forza due possibili stati:
senza attrito Prima del 1600 si riteneva che lo stato naturale della materia fosse lo stato di quiete. Galileo fu il primo ad intuire che, assenza di forze può esistere anche il moto rettilineo uniforme. Un oggetto in quiete o in moto rettilineo uniforme rimarrà nel suo stato stato di quiete o di moto rettilineo uniforme finché non interverrà una forza dall’esterno.

31
interviene una forza che ne cambia lo stato
Principio di inerzia Un oggetto permane nel suo stato di quiete o di moto rettilineo uniforme finché non interviene una forza che ne cambia lo stato

32
Sistemi inerziali tuttavia Qualunque sistema di riferimento
in moto rettilineo uniforme rispetto ad un riferimento inerziale è un sistema inerziale Sistema di riferimento inerziale: un sistema in cui è valida la prima legge di Newton Un sistema fisso o in moto rettilineo uniforme rispetto alle stelle “fisse” è un sistema di riferimento inerziale La Terra ruota intorno al proprio asse e intorno al Sole, perciò un sistema fisso rispetto alla Terra non è un sistema inerziale tuttavia Nella maggior parte delle situazioni sarà possibile trascurare queste piccole accelerazioni e considereremo inerziale un sistema solidale con la Terra

33
MOTO relativo O’ S’ S’ O’ O S

34
Trasformazioni di Galilei
Passaggio dall’uno all’altro per mezzo delle trasformazioni di Galilei Invarianza galileiana Un oggetto in moto rettilineo uniforme in un sistema inerziale risulta in moto rettilineo uniforme in uno qualsiasi dei sistemi inerziali. Se è soggetto ad un’ accelerazione a, esso avrà la stessa accelerazione in tutti gli altri sistemi 23/03/06

35
Seconda legge della dinamica
an a F F1 Fn F1 F2 F3 F4 … Fn a1 a2 a3 a4 an La forza di 1 N imprime un’accelerazione di ad una massa di

36
il peso Forza gravitazionale e peso Peso di 1 Kgm
una forza particolare: il peso forza con cui un oggetto viene attirato verso il centro della Terra Peso di 1 Kgm Cambia da punto a punto sulla Terra al livello del mare Sulla Luna in cima ad una montagna

37
Terza legge della dinamica principio di azione e reazione
S T FST FTS Agiscono su corpi diversi Sono uguali e opposte F12 F21 1 2

38
Quantità di moto http://www.walter-fendt.de/ph14i/ Quantità di moto o
Momento (lineare) Conservazione della quantità di moto Quando in un sistema di particelle queste sono soggette solo a forze interne newtoniane (e la risultante delle forze esterne è nulla) la quantità di moto totale del sistema rimane costante
 Conservazione della. quantità di moto. Quando in un sistema di particelle queste sono soggette solo a forze interne newtoniane. (e la risultante delle forze esterne è nulla) la quantità di moto totale del sistema rimane costante.")
39
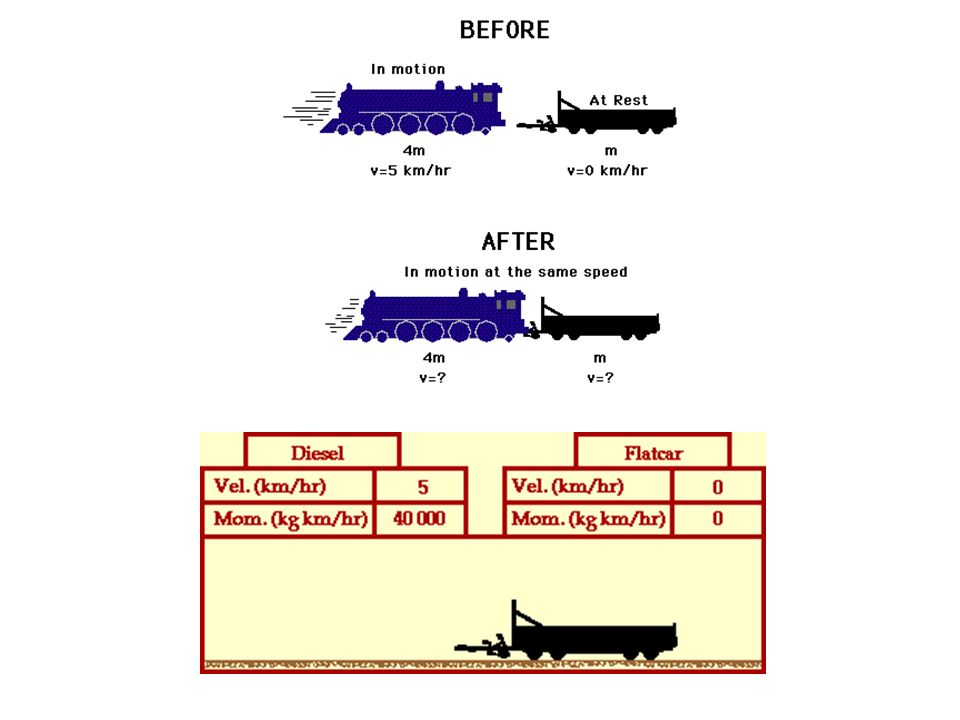
In un sistema isolato si conserva la quantità di moto
Urti Isolato: la somma delle forze esterne è nulla In un sistema isolato si conserva la quantità di moto PRIMA DOPO

40
PRIMA DOPO

43
java

44
Gravitazione universale Costante di gravitazione universale

45
Sulla superficie Sulla Luna

Presentazioni simili










 che determinano le variazioni dello stato di moto.>")


>")







