Scaricare la presentazione
La presentazione è in caricamento. Aspetta per favore

1
Progettazione Stradale
ANDAMENTO PLANIMETRICO Tecnica del “Tracciato” Poligonale d’asse Asse stradale ANDAMENTO ALTIMETRICO Profilo longitudinale del terreno Profilo longitudinale della strada SEZIONI TRASVERSALI Disegno delle sezioni Volume del solido stradale

2
Inquadramento Generale

3
Le Curve di Livello

4
Il metodo della Diagonalizzazione

5
Le Superfici Quotate

6
Impostazione Geometrica del Tracciato

7
Andamento Planimetrico del Tracciato Stradale
100 102 104 106 108 112 114 116 118 120 122 IL TRACCIATO Poligonale a Pendenza Costante COSTITUITA DA SEGMENTI DI LUNGHEZZA FISSA CHE SI APPOGGIANO A 2 CURVE DI LIVELLO ADIACENTI 100 102 104 106 108 112 114 116 118 120 122 Inserimento dei Raccordi Circolari

8
Raccordi Verticali Inserimento dei Picchetti

9
Andamento Altimetrico
Tracciato del Terreno ⇒ LINEA NERA Sviluppo dell’Intersezione tra la Superficie Cilindrica avente per Direttrice l’Asse Stradale e Generatrice una retta Verticale ed il Terreno Tracciato del Progetto ⇒ LINEA ROSSA Composta da tratti a pendenza costante (LIVELLETTE) raccordati da archi di cerchio
 raccordati da archi di cerchio.")
10
Regole per il Coordinamento Plano - Altimetrico
Quando un veicolo percorre una strada, il conducente ha lo sguardo focalizzato su un piano verticale normale alla traiettoria del veicolo, la cui distanza dal suo occhio aumenta con la velocità analogamente, all’aumentare della velocità si restringe il campo della visione periferica, cioè l’angolo entro cui sono contenuti gli oggetti che il conducente riesce a vedere Dalla visione prospettica, che si forma sul piano sul quale tiene focalizzato lo sguardo, il conducente ricava le informazioni circa l’andamento della strada che gli sono necessarie per la guida del veicolo; occorre perciò che queste informazioni siano esatte Il difetto ottico nella visione prospettica nasce quando all’interno di un elemento di tracciato planimetrico di caratteristica geometrica costante (rettifilo, arco di cerchio, clotoide) s’introduce una variazione di pendenza longitudinale con un raccordo di sviluppo inferiore a quello dell’elemento planimetrico. POSIZIONE DEL RACCORDO VERTICALE : Quando un raccordo verticale è situato in un tratto ad andamento rettilineo ed è sufficientemente distante dai punti di tangenza delle curve planimetriche, la percezione del tracciato è corretta. Se non è possibile evitare la sovrapposizione dei due elementi curvilinei, è opportuno far coincidere il vertice del raccordo verticale con quello della curva planimetrica. In tal caso, il risultato ottimale dal punto di vista ottico lo si ottiene se la lunghezza dei due raccordi è dello stesso ordine. Quando non sia possibile spostare i due elementi in modo che le posizioni dei rispettivi vertici coincidano, un miglioramento della qualità ottica del tracciato lo si ottiene imponendo che il rapporto fra il raggio verticale Rv ed il raggio della curva planimetrica R sia > 6.
 s’introduce una variazione di pendenza longitudinale con un raccordo di sviluppo inferiore a quello dell’elemento planimetrico. POSIZIONE DEL RACCORDO VERTICALE : Quando un raccordo verticale è situato in un tratto ad andamento rettilineo ed è sufficientemente distante dai punti di tangenza delle curve planimetriche, la percezione del tracciato è corretta. Se non è possibile evitare la sovrapposizione dei due elementi curvilinei, è opportuno far coincidere il vertice del raccordo verticale con quello della curva planimetrica. In tal caso, il risultato ottimale dal punto di vista ottico lo si ottiene se la lunghezza dei due raccordi è dello stesso ordine. Quando non sia possibile spostare i due elementi in modo che le posizioni dei rispettivi vertici coincidano, un miglioramento della qualità ottica del tracciato lo si ottiene imponendo che il rapporto fra il raggio verticale Rv ed il raggio della curva planimetrica R sia > 6.")
11
Difetti di coordinamento fra elementi planimetrici ed altimetrici
Occorre evitare che il punto di inizio di una curva planimetrica coincida o sia prossimo con la sommità di un raccordo verticale convesso. Se ciò si verifica, risulta mascherato il cambiamento di direzione in planimetria. Quando non è possibile spostare i due elementi in modo che le posizioni dei rispettivi vertici coincidano si deve imporre che Rv/R 6 Occorre evitare che un raccordo planimetrico inizi immediatamente dopo un raccordo concavo. Se ciò si verifica la visione prospettica dei cigli presenta una falsa piega.

12
Difetti di coordinamento fra elementi planimetrici ed altimetrici
Occorre evitare l’inserimento di raccordi verticali concavi di piccolo sviluppo all’interno di curve planimetriche di grande sviluppo. In questo caso, la visione prospettica di uno dei cigli presenta difetti di continuità. (per correggere tale difetto occorre aumentare il rapporto Rv/R in modo che gli sviluppi dei due raccordi coincidano) Occorre evitare il posizionamento di un raccordo concavo immediatamente dopo la fine di una curva planimetrica. Anche in questo caso nelle linee di ciglio si presentano evidenti difetti di continuità ed inoltre si percepisce un restringimento della larghezza della sede stradale che può indurre l’utente ad adottare comportamenti non rispondenti alla reale situazione del tracciato. (Questo difetto può essere ancora corretto portando a coincidere i vertice dei due elementi)
 Occorre evitare il posizionamento di un raccordo concavo immediatamente dopo la fine di una curva planimetrica. Anche in questo caso nelle linee di ciglio si presentano evidenti difetti di continuità ed inoltre si percepisce un restringimento della larghezza della sede stradale che può indurre l’utente ad adottare comportamenti non rispondenti alla reale situazione del tracciato. (Questo difetto può essere ancora corretto portando a coincidere i vertice dei due elementi)")
13
Difetti di coordinamento fra elementi planimetrici ed altimetrici
Occorre evitare che il vertice di un raccordo concavo coincida o sia prossimo ad un punto di flesso della linea planimetrica. Anche in questo caso la visione prospettica è falsata e l’utente percepisce un falso restringimento della larghezza della sede stradale. (Anche in questo caso il difetto può essere risolto portando a coincidere i vertice dei due elementi) Quando un raccordo concavo segue un raccordo convesso, nel quadro prospettico dell’utente può rimanere mascherato un tratto intermedio del tracciato, in questo caso si ha la cosiddetta “perdita di tracciato”.
 Quando un raccordo concavo segue un raccordo convesso, nel quadro prospettico dell’utente può rimanere mascherato un tratto intermedio del tracciato, in questo caso si ha la cosiddetta perdita di tracciato .")
14
Regole Pratiche Un raccordo verticale deve essere inserito all’interno di un elemento del tracciato orizzontale avente caratteristiche omogenee. Così esso può investire una clotoide e il successivo arco di cerchio avente curvatura dello stesso segno, ma è bene che non comprenda un rettifilo e la successiva clotoide, oppure i due tratti di curvatura opposta di una clotoide di flesso. Inoltre è bene che lo sviluppo del raccordo comprendi gran parte di quello dell’elemento di tracciato orizzontale in cui è inserito. Quando un raccordo verticale convesso è inserito in una curva del tracciato orizzontale, è opportuno localizzare l’origine del raccordo dopo una deviazione di circa 3º della clotoide che precede la curva circolare; questa condizione deve essere rispettata tanto più rigorosamente quanto minore è il raggio della curva orizzontale. Questo regola serve per garantire che l’utente veda l’esistenza della curva orizzontale prima dell’inizio del dosso, in modo da evitare pericolosi effetti di sorpresa. Consideriamo un tracciato orizzontale privo di rettifili, il quale presene pertanto dei punti di flesso; il corrispondente profilo sia costituito da una successione di raccordi concavi e convessi separati da brevi livellette. Perché le condizioni a) e b) siano soddisfatte, i punti terminali dei raccordi concavi debbono essere molto prossimi ai punti di flesso del tracciato orizzontale flesso del tracciato orizzontale. Se invece profilo longitudinale è formato da soli elementi curvilinei, senza livellette, i suoi punti di flesso debbono coincidere con quelli del tracciato orizzontale (principio di corrispondenza dei punti d’inflessione).
 e b) siano soddisfatte, i punti terminali dei raccordi concavi debbono essere molto prossimi ai punti di flesso del tracciato orizzontale flesso del tracciato orizzontale. Se invece profilo longitudinale è formato da soli elementi curvilinei, senza livellette, i suoi punti di flesso debbono coincidere con quelli del tracciato orizzontale (principio di corrispondenza dei punti d’inflessione).")
15
Sezioni Trasversali INTERSEZIONE DEL CORPO STRADALE E DEL TERRENO CON UN PIANO VERTICALE NORMALE ALL’ASSE STRADALE in Corrispondenza dei Picchetti EVIDENZIANO L’ANDAMENTO TRASVERSALE DEL CORPO STRADALE E DEL TERRENO FORNISCONO GLI ELEMENTI NECESSARI PER IL CALCOLO DEL VOLUME DEL SOLIDO STRADALE (MOVIMENTI TERRA) LE SEZIONI SI RAPPRESENTANO COME APPAIONO AD UN OSSERVATORE CHE, RIVOLTO VERSO L’ORIGINE DELLA STRADA, SI DIRIGE A RITROSO VERSO LA FINE
 LE SEZIONI SI RAPPRESENTANO COME APPAIONO AD UN OSSERVATORE CHE, RIVOLTO VERSO L’ORIGINE DELLA STRADA, SI DIRIGE A RITROSO VERSO LA FINE.")
16
Andamento Trasversale del tracciato stradale
Si riporta in planimetria la traccia del piano di sezione per “leggere” l’andamento trasversale del terreno Si riporta l’andamento della piattaforma stradale Si riporta l’andamento trasversale del terreno

17
Principali criteri di composizione dell’asse
La lunghezza massima dei rettifili è limitata dalla normativa ad un valore pari a 22 V p max; le ragioni di tale limitazione sono da individuare nei seguenti fatti: Limitare le velocità dei veicoli Ridurre la monotonia dei tracciati Consentire una adeguata valutazione delle distanze Contenere i fenomeni di abbagliamento La lunghezza minima delle curve circolari imposta dalla normativa per garantire che l’utente possa percepire l’elemento geometrico è tale che il tempo minimo di percorrenza in curva sia pari 2.5 secondi La normativa inoltre, al fine di assicurare un livello minimo di omogeneità geometrica del tracciato, impone un rapporto tra raggi planimetrici di curve consecutive e una relazione tra lunghezza di un rettifilo e raggio della curva adiacente La lunghezza minima dei rettifili è limitata dalla normativa per valori variabili con la velocità; tale limitazione deriva dalle esigenze di percezione della geometria che condizionano il fenomeno della guida

18
Le geometrie di transizione - Clotoide
Nel passaggio tra un rettifilo e un arco di cerchio si determina una brusca variazione di curvatura che comporta: per i veicoli a guida vincolata (ferrovia) significativi effetti dinamici (contraccolpo c=da t/dt), per i veicoli stradali l’impossibilità di descrivere traiettorie coincidenti con la geometria dell’asse della corsia s indica lo sviluppo generico della curva a partire dal punto ove 1/r = 0 (punto di flesso) Essendo A>0, la clotoide in un sistema cartesiano si sviluppo nel I° e III°quadrante. Per contenere questi effetti è opportuno introdurre tra rettifilo e arco di cerchio una geometria a curvatura variabile di opportuno sviluppo spirale clotoidica r sn=An+1 In funzione delle esigenze progettuali, assunta una legge del moto v(t) e imposto un predeterminato andamento delle curvature, può ricavarsi il grado n della clotoide. Se si considera una variazione lineare della curvatura, per velocità costante si ha n=1 Predeterminato il grado della clotoide l’equazione gode di un solo grado di libertà. Imponendo quindi una condizione tutte le altre variabili risultano univocamente determinate.
 significativi effetti dinamici. (contraccolpo c=da t/dt), per i veicoli stradali l’impossibilità di descrivere traiettorie coincidenti con la. geometria dell’asse della corsia. s indica lo sviluppo generico della curva a partire dal punto. ove 1/r = 0 (punto di flesso) Essendo A>0, la clotoide in un sistema cartesiano si sviluppo. nel I° e III°quadrante. Per contenere questi effetti è opportuno introdurre. tra rettifilo e arco di cerchio. una geometria a curvatura variabile di opportuno sviluppo. spirale clotoidica. r sn=An+1. In funzione delle esigenze progettuali, assunta una legge del moto v(t) e imposto un predeterminato andamento delle curvature, può ricavarsi il grado n della clotoide. Se si considera una variazione lineare della curvatura, per velocità costante si ha n=1. Predeterminato il grado della clotoide l’equazione gode di un solo grado di libertà. Imponendo quindi una condizione tutte le altre variabili risultano univocamente determinate.")
19
F = punto finale della clotoide
R (m) = raggio dell’arco di cerchio da raccordare L (m) = lunghezza dell’arco di clotoide τ p = angolo di deviazione nel generico punto P τ f = angolo di deviazione nel punto di fine della clotoide
 = raggio dell’arco di cerchio da raccordare. L (m) = lunghezza dell’arco di clotoide. τ p = angolo di deviazione nel generico punto P. τ f = angolo di deviazione nel punto di fine della clotoide.")
20
Le geometrie di transizione
in Ferrovia La necessità di introdurre una curva di transizione tra rettilineo e arco di cerchio nella geometria ferroviaria deriva dal fatto che in assenza di essa si determina nel punto di raccordo l’insorgere istantaneo di un’accelerazione centripeta ed il conseguente sviluppo impulsivo di una forza centrifuga, che può indurre sollecitazioni dinamiche non compatibili al contatto ruota rotaia. E’ pertanto indispensabile limitare la variazione nel tempo dell’accelerazione attraverso l’introduzione di una geometria a curvatura variabile (1/ñ), alla quale corrisponda una variazione regolare della curvatura. in Strada Nella geometria stradale l’opportunità di inserire una curva di transizione tra arco di cerchio e rettilineo deriva dal fatto che il veicolo stradale essendo non vincolato ad una specifica traiettoria imposta geometricamente, può percorrere ed in generale percorre una propria traiettoria di transizione che è definita dalla sterzatura applicata dall’utente alla guida. D’altra parte una geometria priva di transizione tra cerchio e rettilineo non può essere esattamente percorsa dal veicolo stradale considerata l’impossibilità di ruotare istantaneamente lo sterzo nel punto di raccordo in modo da passare dall’assetto delle ruote in rettilineo ad un assetto deviato di uno specifico angolo è R che consenta di percorrere l’arco di cerchio di raggio R. Ciò sarebbe possibile in prima approssimazione solo se il veicolo si fermasse in corrispondenza del punto di raccordo e, a veicolo fermo, l’assetto delle ruote passasse da è=0 a è=è R. Pertanto allo scopo di disporre di una geometria dell’asse stradale teoricamente percorribile da un veicolo è indispensabile inserire un arco di transizione tra il rettilineo ed il cerchio, tale per cui la curvatura vari lungo la transizione regolarmente e l’utente possa articolare una manovra così che la traiettoria del veicolo non si discosti dall’asse stradale.
, alla quale corrisponda una variazione regolare della curvatura. in Strada. Nella geometria stradale l’opportunità di inserire una curva di transizione tra arco di cerchio e rettilineo deriva dal fatto che il veicolo stradale essendo non vincolato ad una specifica traiettoria imposta geometricamente, può percorrere ed in generale percorre una propria traiettoria di transizione che è definita dalla sterzatura applicata dall’utente alla guida. D’altra parte una geometria priva di transizione tra cerchio e rettilineo non può essere esattamente percorsa dal veicolo stradale considerata l’impossibilità di ruotare istantaneamente lo sterzo nel punto di raccordo in modo da passare dall’assetto delle ruote in rettilineo ad un assetto deviato di uno specifico angolo è R che consenta di percorrere l’arco di cerchio di raggio R. Ciò sarebbe possibile in prima approssimazione solo se il veicolo si fermasse in corrispondenza del punto di raccordo e, a veicolo fermo, l’assetto delle ruote passasse da è=0 a è=è R. Pertanto allo scopo di disporre di una geometria dell’asse stradale teoricamente percorribile da un veicolo è indispensabile inserire un arco di transizione tra il rettilineo ed il cerchio, tale per cui la curvatura vari lungo la transizione regolarmente e l’utente possa articolare una manovra così che la traiettoria del veicolo non si discosti dall’asse stradale.")
21
Dimensionamento delle Curve di Transizione
Il dimensionamento di una clotoide deve rispettare alcuni criteri al fine di garantire una configurazione idonea sotto il profilo della sicurezza dell’esercizio viario. 1. In particolare, per quanto attiene i criteri di natura ottica: si deve garantire che la clotoide abbia uno scostamento dal rettilineo sufficiente da essere percepita dall’utente L > 4.90 (R)1/2 si deve garantire che la clotoide abbia una deviazione per un angolo di ampiezza sufficiente ad essere percepita A > R/3 per quanto attiene il contraccolpo: si deve garantire che il contraccolpo sia inferiore ad un valore massimo accettabile A > V2 Per quanto attiene le sovrapendenze: si deve garantire che la rotazione della sagoma stradale non avvenga così velocemente da indurre accelerazioni di rollio eccessive ∆i per quanto attiene le pendenze minime di piattaforma: si deve garantire che la rotazione della sagoma non avvenga troppo lentamente per cui il tratto a pendenza trasversale < 2.5% sia troppo esteso ∆i 2. Per quanto attiene gli aspetti strettamente geometrici: si deve garantire che la lunghezza della clotoide non sia superiore ad una lunghezza massima legata alla necessità di inserire un arco di cerchio L < R w
1/2. si deve garantire che la clotoide abbia una deviazione per un angolo di ampiezza sufficiente ad essere percepita A > R/3. per quanto attiene il contraccolpo: si deve garantire che il contraccolpo sia inferiore ad un valore massimo accettabile A > V2. Per quanto attiene le sovrapendenze: si deve garantire che la rotazione della sagoma stradale non avvenga così velocemente da indurre accelerazioni di rollio eccessive ∆i per quanto attiene le pendenze minime di piattaforma: si deve garantire che la rotazione della sagoma non avvenga troppo lentamente per cui il tratto a pendenza trasversale < 2.5% sia troppo esteso ∆i. 2. Per quanto attiene gli aspetti strettamente geometrici: si deve garantire che la lunghezza della clotoide non sia superiore ad una lunghezza massima legata alla necessità di inserire un arco di cerchio. L < R w.")
22
Applicazioni progettuali della meccanica della locomozione
Aderenza Equilibrio in Curva Determinazione del Raggio Minimo

23
Coefficiente di Aderenza
Per garantire la sicurezza dell’esercizio si farà riferimento alle condizioni più vincolanti. Se è lecito prevedere una compartecipazione dell’utente nella gestione del rischio si può far riferimento a condizioni “minime normali” di esercizio. Stimato il valore reale del coefficiente di aderenza (fr) si assumerà un valore numerico più contenuto introducendo un opportuno grado di sicurezza (µp), tanto maggiore quanto più risulta elevato il rischio indotto dalla perdita di aderenza. In relazione al rischio della manovra il grado di sicurezza cresce con la velocità e si assume più elevato per la marcia in curva. Velocità km/h 25 40 60 80 100 120 140 Aderenza Trasversale Ft max [A,B,C,F extraurbana] - 0,21 0,17 0,13 0,11 0,10 0,09 Aderenza trasversale Ft max [D,E,F urbane] 0,22 0,20 0,16
 si assumerà un valore numerico più contenuto. introducendo un opportuno grado di sicurezza (µp), tanto maggiore quanto più risulta elevato il rischio. indotto dalla perdita di aderenza. In relazione al rischio della manovra il grado di sicurezza cresce con la velocità e si assume più elevato per. la marcia in curva. Velocità km/h Aderenza Trasversale. Ft max [A,B,C,F extraurbana] - 0,21. 0,17. 0,13. 0,11. 0,10. 0,09. Aderenza trasversale. Ft max [D,E,F urbane] 0,22. 0,20. 0,16.")
24
Pendenze longitudinali (livellette)
Il criterio assunto per il dimensionamento della livelletta massima su una via (massima relativa, si ricordi che la livelletta massima assoluta da adottare per le rampe si dimensiona sulla base delle equazioni del moto in trazione assumendo un valore basso dell’accelerazione di spunto ma comunque diverso da zero per consentire che il veicolo possa ripartire anche se dovesse fermarsi sulla livelletta) è ispirato alla garanzia di sicurezza dell’esercizio, ed in particolare impone che lo spazio di arresto in discesa (ovviamente superiore a quello sul piano) superi il valore dello spazio di arresto sul piano di una prefissata lunghezza (α): La norma fissa “a priori” i valori massimi di pendenza ammissibili per i diversi tipi di strade prevedono che possono essere aumentati di una unità percentuale qualora risulti che “…lo sviluppo della livelletta sia tale da non penalizzare eccessivamente la circolazione…”. La teoria del deflusso consente analoghe verifiche con riferimento ai flussi. Il profilo altimetrico è costituito da tratti a pendenza costante (livellette) collegati da raccordi verticali convessi e concavi.
 è ispirato alla garanzia di. sicurezza dell’esercizio, ed in particolare impone che lo spazio di arresto in discesa (ovviamente superiore a. quello sul piano) superi il valore dello spazio di arresto sul piano di una prefissata lunghezza (α): La norma fissa a priori i valori massimi di pendenza ammissibili per i diversi tipi di strade prevedono che. possono essere aumentati di una unità percentuale qualora risulti che …lo sviluppo della livelletta sia tale da. non penalizzare eccessivamente la circolazione… . La teoria del deflusso consente analoghe verifiche con riferimento ai flussi. Il profilo altimetrico è costituito da tratti a pendenza costante (livellette) collegati da. raccordi verticali convessi e concavi.")
25
Equilibrio del veicolo in curva
L’inclinazione della piattaforma stradale (α) verso l’interno della curva favorisce l’equilibrio del veicolo in transito. Forza peso (P) e forza centrifuga (Fc) danno origine ad un sistema equivalente per il quale di norma: si riduce la forza trasversale Ft (destabilizzante) Ft = Fc cos(α) –P sin(α) aumenta la forza normale al vincolo Fn (stabilizzante) Fn = Fc sin(α) + P cos(α) Le condizioni limite di equilibrio si determinano: allo slittamento Ft = Fn ft limite essendo ft limite il coefficiente ammissibile di aderenza trasversale al ribaltamento Ft h = Fn s/2 essendo h l’altezza del baricentro del veicolo ed s il passo trasversale 2.4 Dovendo essere Ft / Fn < ft limite e Ft / Fn < s / 2h l’equilibrio è garantito se Ft / Fn < a* dove a* esprime una condizione limite da assicurare adottando opportuni gradi di sicurezza. Sviluppando tale condizione, accettate alcune semplificazioni compatibili con i gradi di sicurezza assunti, ne deriva: V2 / R – g tan (α) < a* Tale relazione consente di valutare con buona approssimazione le condizioni dell’equilibrio in curva del veicolo
 verso l’interno della curva favorisce l’equilibrio del veicolo in transito. Forza peso (P) e forza centrifuga (Fc) danno origine ad un sistema equivalente per il quale di norma: si riduce la forza trasversale Ft (destabilizzante) Ft = Fc cos(α) –P sin(α) aumenta la forza normale al vincolo Fn (stabilizzante) Fn = Fc sin(α) + P cos(α) Le condizioni limite di equilibrio si determinano: allo slittamento Ft = Fn ft limite essendo ft limite il coefficiente ammissibile di aderenza trasversale. al ribaltamento Ft h = Fn s/2 essendo h l’altezza del baricentro del veicolo ed s il passo trasversale Dovendo essere Ft / Fn < ft limite e Ft / Fn < s / 2h l’equilibrio. è garantito se Ft / Fn < a* dove a* esprime una condizione. limite da assicurare adottando opportuni gradi di sicurezza. Sviluppando tale condizione, accettate alcune semplificazioni. compatibili con i gradi di sicurezza assunti, ne deriva: V2 / R – g tan (α) < a* Tale relazione consente di valutare con buona approssimazione. le condizioni dell’equilibrio in curva del veicolo.")
26
Il progetto del raggio minimo
Sia assunta una velocità di progetto della strada Vp Sia fissato il valore di amax compatibile con l’equilibrio del veicolo “lento” Tenuto conto dei valori limite di aderenza trasversale che si ritengono ammissibili (avendo considerato lo slittamento più vincolante del ribaltamento) Rmin = Vp 2 / [g tan(αmax) + a*]
 Rmin = Vp 2 / [g tan(αmax) + a*]")
27
Equilibrio del veicolo in curva – α in curve con R > R minimo
Una volta che sia stata determinata la velocità prevista in curva (Vx > Vp) la più opportuna ripartizione dell’accelerazione totale (Vx 2/R) tra quanto compensato dall’inclinazione della piattaforma e l’accelerazione residua, posto a / [g tan(α)] = k sarà infatti tan(α) = Vx 2 / [R (1+k) g] dove: Vx sarà un valore opportunamente interpolato tra la velocità compatibile con il raggio minimo (Vp) e la velocità massima assunta per la strada in assenza di vincoli geometrici (Vpmax) k è un coefficiente variabile con la velocità in quanto, per effetto delle sospensioni, la compensazione garantita da α risulta tanto meno efficace, quanto più sono alte le velocità di esercizio 2.4.2a NB. Il modello fisico a cui ci si riferisce e grossolanamente approssimato (accettabile per il ruolo affidato alla gestione dei gradi di sicurezza) non tiene conto infatti della ripartizione dei carichi sulle ruote e degli effetti indotti dalle sospensioni. In coerenza con i principi assunti per la progettazione geometrica dell’infrastruttura i valori di Rmin indicati dalla norma sono calcolati in condizioni “minime normali” di esercizio viario: ft limite = ft (strada bagnata) / µp (grado di sicurezza del progettista)
 la più opportuna ripartizione dell’accelerazione totale (Vx. 2/R) tra quanto compensato dall’inclinazione della. piattaforma e l’accelerazione residua, posto a / [g tan(α)] = k sarà infatti tan(α) = Vx. 2 / [R (1+k) g] dove: Vx sarà un valore opportunamente interpolato tra la velocità compatibile con il raggio minimo (Vp) e la velocità. massima assunta per la strada in assenza di vincoli geometrici (Vpmax) k è un coefficiente variabile con la velocità in quanto, per effetto delle sospensioni, la compensazione garantita. da α risulta tanto meno efficace, quanto più sono alte le velocità di esercizio a. NB. Il modello fisico a cui ci si riferisce e grossolanamente approssimato (accettabile per il ruolo affidato. alla gestione dei gradi di sicurezza) non tiene conto infatti della ripartizione dei carichi sulle ruote e degli. effetti indotti dalle sospensioni. In coerenza con i principi assunti per la progettazione geometrica dell’infrastruttura i valori di Rmin. indicati dalla norma sono calcolati in condizioni minime normali di esercizio viario: ft limite = ft (strada bagnata) / µp (grado di sicurezza del progettista)")
28
Equilibrio del veicolo in curva – α in curve con R > R minimo
Per la determinazione della pendenza trasversale su raggio non minimo: si determina il raggio minimo alla velocità minima di progetto, si determina il raggio limite alla velocità massima di progetto (pari a 5 volte il raggio minimo calcolato alla medesima velocità massima di progetto) si verifica il valore di pendenza trasversale
 si verifica il valore di pendenza. trasversale.")
29
Equilibrio del veicolo in curva – verifica dell’esercizio
In condizioni di Rmin la velocità d’esercizio sarà funzione: delle condizioni reali d’aderenza (strada asciutta o bagnata) del grado di sicurezza assunto dall’utente µu < µp L’equazione d’equilibrio conduce pertanto a: Ve = [Rmin (g tan(αmax) + au)] 1/2 da cui Ve = Vp [(g tan(αmax) + au) / (g tan(αmax) + a*)]1/2 con au > a* in quanto per la verifica allo slittamento a* = g ft (reale su strada bagnata) / µp au = g ft (reale nelle condizioni d’esercizio) / µu Sarà quindi Ve > Vp 2.4.3 ∆V = Ve – Vp sarà massimo in condizioni di strada “asciutta” e tanto più elevato quanto minore è il contributo offerto dalla pendenza trasversale Le misure effettuate sul campo forniscono un riscontro dell’analisi teorica con Ve (su strada asciutta) = Vp Di ciò si dovrebbe tener conto: • per verificare quali siano le reali condizioni di “maggior rischio” a cui riferire le geometrie di progetto • per dimensionare opportunamente gli standard geometrici correlati alla velocità Ve (p.es. visibilità per il sorpasso) La normativa non tiene conto delle precedenti considerazioni e l’analisi d’incidentalità dimostra che ciò influenza negativamente la sicurezza dell’esercizio viario. Viene suggerita la verifica del diagramma solo delle velocità di progetto e la sua costruzione è anch’essa solo convenzionale
 del grado di sicurezza assunto dall’utente µu < µp. L’equazione d’equilibrio conduce pertanto a: Ve = [Rmin (g tan(αmax) + au)] 1/2 da cui. Ve = Vp [(g tan(αmax) + au) / (g tan(αmax) + a*)]1/2 con au > a* in quanto per la verifica allo slittamento. a* = g ft (reale su strada bagnata) / µp. au = g ft (reale nelle condizioni d’esercizio) / µu. Sarà quindi Ve > Vp ∆V = Ve – Vp sarà massimo in condizioni di strada asciutta e tanto più elevato quanto minore è il contributo offerto. dalla pendenza trasversale. Le misure effettuate sul campo forniscono un riscontro dell’analisi teorica con Ve (su strada asciutta) = Vp. Di ciò si dovrebbe tener conto: • per verificare quali siano le reali condizioni di maggior rischio a cui riferire le geometrie di progetto. • per dimensionare opportunamente gli standard geometrici correlati alla velocità Ve (p.es. visibilità per il sorpasso) La normativa non tiene conto delle precedenti considerazioni e l’analisi d’incidentalità dimostra che ciò influenza. negativamente la sicurezza dell’esercizio viario. Viene suggerita la verifica del diagramma solo delle velocità di. progetto e la sua costruzione è anch’essa solo convenzionale.")
30
Principi di Progettazione Stradale
La domanda di Mobilità Il Dimensionamento della Sezione Trasversale Le Condizioni Di Servizio (HCM) I Livelli Di Servizio La Curva Di Deflusso (HCM)
 I Livelli Di Servizio. La Curva Di Deflusso (HCM)")
31
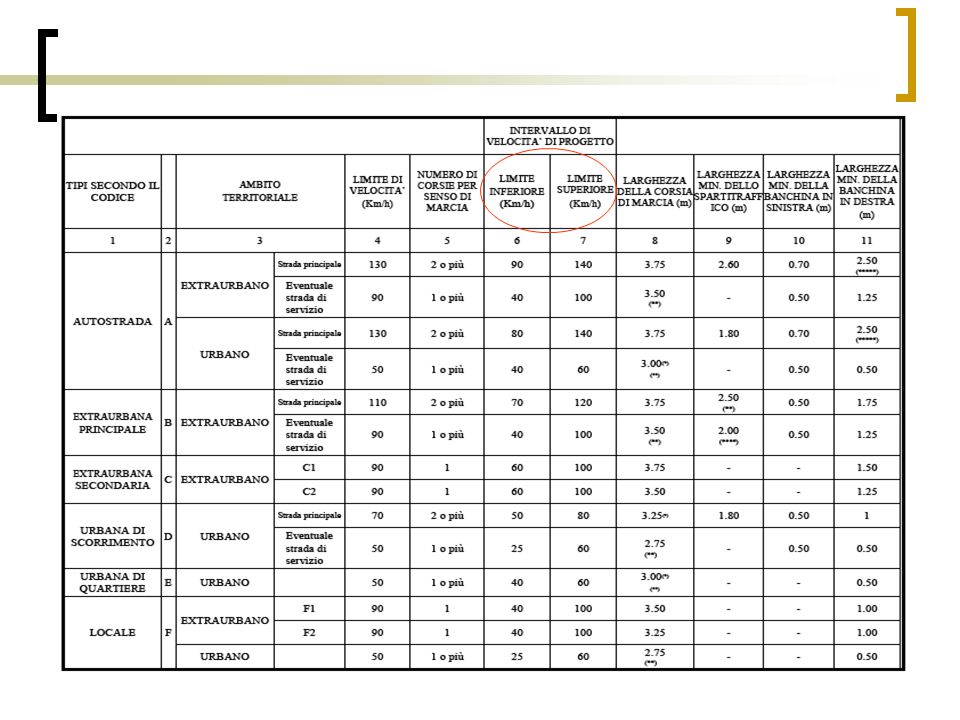
La Velocità di Progetto
La domanda di trasporto determina, come scelta progettuale: la sezione stradale ; l’intervallo della velocità di progetto ; rettifili Curve (circolari e a raggio variabile) L’ offerta di viabilità scaturisce dalla scelta del numero di corsie di marcia della sezione stradale e della loro tipologia. Il limite superiore dell’intervallo è la velocità di riferimento per la progettazione degli elementi meno vincolanti del tracciato, date le caratteristiche della sezione della strada. Essa è almeno pari alla velocità massima di utenza consentita dal Codice per i diversi tipi di strada (limiti generali di velocità ). Il limite inferiore dell’intervallo è la velocità di riferimento per la progettazione degli elementi plano–altimetrici Vmin< V< Vmax Con il termine "intervallo di velocità di progetto" si intende il campo dei valori in base ai quali devono essere definite le caratteristiche dei vari elementi di tracciato della strada (rettifili, curve circolari, curve a raggio variabile). Detti valori variano da elemento ad elemento, allo scopo di consentire al progettista una certa libertà di adeguare il tracciato al territorio attraversato. Il limite superiore dell'intervallo è la velocità di riferimento per la progettazione degli elementi meno vincolanti del tracciato, date le caratteristiche di sezione della strada. Essa è comunque almeno pari alla velocità massima di utenza consentita dal Codice per i diversi tipi di strada (limiti generali di velocità). Il limite inferiore dell'intervallo è la velocità di riferimento per la progettazione degli elementi plano-altimetrici più vincolanti per una strada di assegnata sezione.
 L’ offerta di viabilità scaturisce dalla scelta del numero di corsie di marcia della sezione stradale e della loro tipologia. Il limite superiore dell’intervallo è la velocità di riferimento per la progettazione degli elementi meno vincolanti del tracciato, date le caratteristiche della sezione della strada. Essa è almeno pari alla velocità massima di utenza consentita dal Codice per i diversi tipi di strada (limiti generali di velocità ). Il limite inferiore dell’intervallo è la velocità di riferimento per la progettazione degli elementi plano–altimetrici. Vmin< V< Vmax. Con il termine intervallo di velocità di progetto si intende il campo dei valori in base ai quali devono essere definite le caratteristiche dei vari elementi di tracciato della strada (rettifili, curve circolari, curve a raggio variabile). Detti valori variano da elemento ad elemento, allo scopo di consentire al progettista una certa libertà di adeguare il tracciato al territorio attraversato. Il limite superiore dell intervallo è la velocità di riferimento per la progettazione degli. elementi meno vincolanti del tracciato, date le caratteristiche di sezione della strada. Essa è comunque almeno pari alla velocità massima di utenza consentita dal Codice per i diversi tipi di strada (limiti generali di velocità). Il limite inferiore dell intervallo è la velocità di riferimento per la progettazione degli. elementi plano-altimetrici più vincolanti per una strada di assegnata sezione.")
33
La domanda di Mobilità Il Dimensionamento della Sezione Trasversale
La domanda di trasporto, individuata dal volume orario di traffico, dalla sua composizione e dalla velocità media di deflusso, determina, come scelta progettuale, la sezione stradale e l’intervallo della velocità di progetto. In particolare, la scelta del numero di corsie di marcia della sezione stradale e della loro tipologia definisce l'offerta di traffico, mentre la scelta dell'intervallo di velocità di progetto condiziona, in relazione all'ambiente attraversato dall'infrastruttura, le caratteristiche plano-altimetriche dell'asse e le dimensioni dei vari elementi della sezione. La domanda di mobilità si caratterizza per entità Esigenze Funzionali (Domanda) Ipotesi di Sezione Caratterizzazione geometrica della strada Scenario di Domanda Verifica delle Condizioni di Offerta ok no si Unità di misura: flusso veicolare nell’unità di tempo (TGM, traffico orario, traffico di punta)
 Ipotesi di Sezione. Caratterizzazione geometrica della strada. Scenario di Domanda. Verifica delle Condizioni di Offerta. ok. no. si. Unità di misura: flusso veicolare nell’unità di tempo. (TGM, traffico orario, traffico di punta)")
34
Le Condizioni Di Servizio (HCM) - I Livelli Di Servizio
Le condizioni di servizio di una strada possono essere sinteticamente espresse attraverso due indicatori: 1. la velocità media della corrente veicolare, 2. la densità di flusso data dal rapporto tra flusso e capacità. Sul diagramma in cui si riporta la curva di deflusso si individuano 6 domini delimitati da differenti valori di N/C e della velocità della corrente veicolare, i quali delimitano 6 differenti condizioni di funzionalità dell’infrastruttura. Tali domini sono codificati come LIVELLI DI SERVIZIO. Le condizioni di migliore funzionalità LS A sono evidentemente quelle per cui v c è elevata e N/C bassa, il Livello di Servizio F corrisponde al ramo di instabilità della curva di deflusso.

35
LA CURVA DI DEFLUSSO (HCM)
L’effetto delle interferenze veicolari è descritto dalla curva di deflusso che fornisce il valor medio delle velocità della corrente veicolare vc in funzione della densità di flusso. L’andamento della curva di deflusso dipende: dalle caratteristiche geometriche della strada (velocità di base [v b] per basse densità veicolari N/C = 0) dalle visuali libere disponibili (visibilità per il sorpasso) e dal conseguente ingombro cinematico dei veicoli “lenti” Definita la sezione della strada e verificato il suo prevedibile andamento geometrico si può individuare la “curva di deflusso” tipica che la caratterizza Per alte densità veicolari N/C ~ 1 non cambia sensibilmente il valore della velocità (v c) condizionata quasi esclusivamente dalle interferenze veicolari
 dalle visuali libere disponibili (visibilità per il sorpasso) e dal conseguente ingombro cinematico dei veicoli lenti Definita la sezione della strada e. verificato il suo prevedibile andamento geometrico si può individuare la curva di deflusso tipica che la caratterizza. Per alte densità veicolari N/C ~ 1 non cambia sensibilmente il valore della velocità (v c) condizionata quasi. esclusivamente dalle interferenze veicolari.")
36
Classificazione Delle Strade E Criteri Compositivi Della Piattaforma
Definizione degli elementi - componenti lo spazio stradale Classificazione Funzionale delle Strade

37
Definizione degli elementi - componenti lo spazio stradale
Piattaforma Carreggiata

38
Classificazione Funzionale delle Strade

39
Classificazione Funzionale delle Strade

40
Classificazione Funzionale delle Strade

41
Classificazione Funzionale delle Strade

42
Classificazione Funzionale delle Strade

Presentazioni simili









 connessi in cascata tramite coppie cinematiche (giunti). Si assume.>")






>")


